
Fターム[5H115SF05]の内容
車両の電気的な推進・制動 (204,712) | 車両の制御 (610) | 速度制御 (326) | パターンを用いるもの (97)
Fターム[5H115SF05]に分類される特許
21 - 40 / 97
列車制御信号の構造と信号送信装置と車上演算処理装置及び列車制御方法
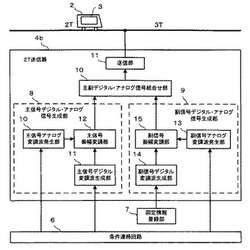
【課題】相互乗り入れ線区でアナログ信号方式の在来列車とデジタル信号方式の新式列車のいずれにも地上から情報を伝送して制御する。
【解決手段】地上の送信器4bは先行列車2の位置等により変化する変化情報を有する主信号デジタル変調波を従来のATC信号に使用されているアナログ信号波により振幅変調して生成した主信号デジタル・アナログ信号波と、該当する区間の線路勾配等の線路構造に関する情報と臨時速度制限情報等の固定情報からなる副信号デジタル変調波を従来のATC信号に使用されているアナログ信号波により振幅変調して生成した副信号デジタル・アナログ信号波とを組み合わせて列車制御信号波を構成して軌道回路2Tに送信する。
(もっと読む)
電動機駆動トラックの運転支援装置および方法

【課題】ディーゼル電気駆動トラックにおいて、積載量重量に適した惰行減速走行を実行するための惰行開始地点を運転者へ案内・支援する支援装置を提供する。
【解決手段】走行するコースの情報を記憶したコース情報データベースと、トラックの車体情報を記憶した車体情報データベースと、現在位置情報を演算する現在位置判定部と、前記データベースおよび入力した情報とから,現在位置と速度および前方の所定地点での目標速度とに基いて前記所定地点で目標速度を達成するための惰行開始タイミングを算出する手段と、その出力に応じて運転者へ惰行開始タイミングを案内する。
(もっと読む)
電気車制御装置
【課題】二次電池を搭載した電気車両に於いて、二次電池の充電状態が不明であるが故に、回生ブレーキ時に二次電池の受容力不足による直流ステージの過電圧が発生するなどの、問題点があった。
【解決手段】二次電池の二次電池電流、二次電池電圧、二次電池温度などから電池の充電状態の指標であるSOC信号の演算が可能であり、この値を、電気車制御装置に入力することにより、上記の課題の解消や、二次電池走行での走行可能距離の延伸など性能改善が可能となる。
(もっと読む)
ハイブリッド車
【課題】エンジンを運転して後進方向に走行する際に駆動トルクが低下するのを抑制する。
【解決手段】シフトポジションが前進走行用のDレンジのときには動作ラインとしてエンジンを効率よく運転できる効率最適動作ラインに対して比較的低回転高トルクの領域にあるこもり音領域での運転を避けるように比較的低回転域のトルクを小さく制限したDレンジ用NV動作ラインを適用して目標回転数と目標トルクとを設定し、シフトポジションが後進走行用のRレンジのときには動作ラインとしてDレンジ用NV動作ラインを適用するより目標回転数が大きく且つ目標トルクが小さく設定されるRレンジ用NV動作ラインを適用して目標回転数と目標トルクとを設定し、エンジンから出力されたトルクによりプラネタリギヤを介して駆動軸に前進方向に作用するトルクを小さくする。
(もっと読む)
走行計画作成装置
【課題】乗員が意図する走行予定経路を特定し、この走行予定経路を計画区間とした走行計画を作成できるようにする。
【解決手段】走行計画の計画区間を特定し、当該計画区間を耐久記憶媒体に記憶させておき、耐久記憶媒体に記憶された計画区間を乗員に提示して、乗員に意図する走行予定経路を特定させ(S406、S408、S412)、乗員の操作に応じて特定された走行予定経路を計画区間とした走行計画を作成する(S500)。
(もっと読む)
列車運転制御方法及び列車運転制御装置
【課題】移動閉塞方式の列車運転制御における運転時隔の短縮。
【解決手段】列車20は、駅進入時には、先ず、停車駅の手前に設けられた待機位置に一旦停車する。また、待機停車中の後列車の位置から停止位置までの距離Lをもとに、待機位置を発車した後列車が、最短時間で停止位置に停車するための走行パターンが算出される。そして、駅に停車中の前列車が発車すると、続いて、待機位置に待機停車中の後列車が発車し、算出した走行パターンに従って運転制御される。すなわち、後列車は、加速時間t1の間、加速度αaでの加速運転を行い(加速期間)、次いで、惰行時間tiの間、惰行運転を行う(惰行期間)。その後、減速度βaでの惰行運転を行い(減速期間)、定められた駅の停止位置に停車する。
(もっと読む)
車両制御装置および車両運転支援装置。
【課題】加減速指令切替時の応答時間の間だけ、加減速指令が保持されれば、加減速状況を評価できるため、制御の応答性を悪化させることなく加減速状況の評価機会を増加させ、加減速状況に応じた適切な速度制御が可能な車両制御装置を提供できる。
【解決手段】車両制御装置1は、過去の加減速指令と整定状態の判定結果を履歴保持手段25に保持しておく。車両制御装置1の加減速状況評価手段27は、現時点から加減速度演算遅れ時間前の時点が整定状態の場合、加減速度演算手段26により得られた現時点での加減速度を整定状態のものと判断し、現時点での加減速度を基準特性保持部23に保持している基準値としての基準加減速度と比較することにより加減速状況を評価する。
(もっと読む)
車両運転装置
【課題】 様々な条件で走行する車両に対して、種々の走行状態あるいは周囲環境に対応する動特性モデルを選択することができ、適切な動特性モデルにより定位置停止制御の精度を向上させることができる。
【解決手段】 車両運転装置としての自動列車運転装置2は、車両としての列車1の運転を制御するための複数の動特性モデルを保持する動特性モデル保持部を有している。自動列車運転装置2は、複数の動特性モデルのうち当該車両の走行状態あるいは周囲環境を監視する動特性モデル切換部を有する。自動列車運転装置2の動特性モデル切換部は、上記のような監視の結果として得られる当該車両の走行状態あるいは周囲環境に応じた最適な動特性モデルを適宜選択する。自動列車運転装置2は、上記動特性モデル切換部が選択した最適な動特性モデルに基づいて制御指令部が当該車両の走行を制御する。
(もっと読む)
ハイブリッド制御装置の検査装置及び検査方法
【課題】ハイブリッド車両用駆動装置を制御するハイブリッド制御装置を、ハイブリッド車両用駆動装置に接続することなく、実際の使用状態に近い状態で検査することができる検査装置及び検査方法を提供する。
【解決手段】少なくとも一つの回転電機を備えたハイブリッド車両用駆動装置3を制御するハイブリッド制御装置2の検査を行う検査装置1であって、ハイブリッド車両に搭載された状態でハイブリッド制御装置2との間で信号の入出力が可能な状態で接続される接続対象物を代替する代替手段11と、ハイブリッド制御装置2からの出力信号を検査する出力検査手段17とを備え、代替手段11が、ハイブリッド制御装置2に対して、ハイブリッド車両の所定の走行状態を模擬した検査パターンに従う信号の入出力を行い、それに対するハイブリッド制御装置2からの出力信号を出力検査手段17により検査する。
(もっと読む)
過走防護パターン追従機能を備えた自動列車運転装置
【課題】過走防護パターンの速度より低い速度で安全に列車を停止させると共に、運行遅れを生じない列車自動運転を実現する。
【解決手段】ATO部11は、OPRトリガ信号に応答してOPRパターンを算出し、該ORPパターンより低い目標減速パターンを生成し(ステップS208)、前記目標減速パターンに従って列車が走行して停止するように制動指令を出力する(ステップS209、S210)。
(もっと読む)
電気車制御方法及び電気車制御装置
【課題】リアルタイムに変化する軸重移動量を動的に考慮したトルク制御の実現。
【解決手段】トルク指令演算器200から出力されるトルクパタン指令τen*は、動的軸重移動補償制御器700による動的軸重移動補償指令τe_det*と、再粘着制御器400による再粘着指令τe_re*との分だけ引き下げられたインバータトルク指令τen_in*として、ベクトル制御演算器30に入力される。軸重移動演算器600は、トルク指令演算器200から出力されるトルクパタン指令τen*と、ベクトル制御装置30に入力されるインバータトルク指令τen_in*との差Δτe*から、各軸の軸重移動量ΔWnの変動ΔVnを算出する。そして、トルク指令演算器200は、各軸の軸重を軸重変動ΔVnで補正して、トルクパタン指令τen*を算出する。
(もっと読む)
鉄道車両の駆動装置
【課題】速度の遅い気動車の走行パターンで地方路線を走行しているハイブリッド車を高速で密なダイヤで運行している電気車の走行区間にそのまま乗り入れると、他の電気車がハイブリッド車に追いついてダイヤが乱れるという不都合が生じる。
【解決手段】現在の走行路線を検出する装置を設けて、検出した路線に応じて制御装置では最適な走行パターンを選択し、各装置に出力する指令値を切り替えることにより、走行路線に応じて他の気動車および電気車と同じ走行パターンで運転できる。このことにより、踏切等の地上側の設備、運行ダイヤを変更する必要がなく、容易に気動車をハイブリッド車に置き換えることができる。
(もっと読む)
走行制御装置
【課題】回生制動における最大減速度を考慮して低燃費化を図ることができる走行制御装置を提供する。
【解決手段】モータ43を発電機として作動させ回生制御によりバッテリ44を充電して制動するハイブリットシステム4を有する車両の走行制御装置1であって、減速時の速度域に応じて、回生制動装置による回生限界減速度の演算手法を変更する回生限界減速度演算部9と、回生限界減速度に基づいて減速区間の速度パターンを生成する目標速度パターン生成部10と、を備え、回生限界減速度演算部9は、減速時の速度が第1速度以上の第1速度域に属する場合には、バッテリ44の入力密度上限によって規定される回生力の制限に基づいて回生限界減速度を演算することにより、バッテリ44の入力限界特性を考慮して速度パターンを生成することができる。
(もっと読む)
走行制御装置
【課題】エンジン及びモータを駆動源とする車両において、システム全体として低燃費化を図ることができる走行制御装置を提供する。
【解決手段】エンジン42及びモータ43を駆動源とする車両であって、所定地点までの行程を複数の区間に設定して各区間での速度パターンを生成する目標速度パターン生成部10と、速度パターンに基づいて加速する加速区間において、加速する際の速度が第1速度以下の速度域である場合には、エンジンの熱効率を優先した加速度パターンを生成し、加速する際の速度が第1速度より大きく第1速度よりも大きい第2速度以下の速度域である場合には、モータのエネルギー変換における損失を最小化することを優先した加速度パターンを生成する目標速度パターン再生成部11と、を備えることにより、モータ43の変換ロスを考慮した低燃費走行が可能となる。
(もっと読む)
車両運行制御システム
【課題】複数の車両に搭載された電池の寿命を平準化させる。
【解決手段】管理センタ100は、各走行路を走行する各車両1から電池温度等のデータを収集する。管理センタ100の演算部108は、各走行路毎に電池温度、電池電流値、SOCの変化量等に基づき電池寿命を算出し、電池寿命が分散するように各走行路毎の運行日数を設定した運行パターンを決定して各車両1に指示する。運行パターンは複数設定し、電池寿命が分散されるように設定する。
(もっと読む)
走行制御装置
【課題】バッテリのSOCの状態を考慮して燃費低下を回避する走行制御を行うことができる走行制御装置を提供する。
【解決手段】エンジン42及びモータ43を有し、モータ43を発電機として作動させ回生制御によりバッテリ44を充電可能に構成された車両の走行制御装置であって、所定地点までの行程を複数の区間に分割して各区間での目標速度パターンを生成する目標速度パターン生成部10と、バッテリ44のSOCが第1の所定値以下の場合には、目標速度パターンに基づいて加速する加速区間において目標速度パターンに規定される加速よりも大きな加速を行い、目標速度パターンに基づいて減速する減速区間において回生制御による減速を行う目標速度パターンを再生成する目標速度パターン再生成部11と、を備えることにより、SOC不足状態に起因した動作により燃費が低下することを回避することが可能となる。
(もっと読む)
鉄道車両の制御方法および装置
【課題】ディーゼルエンジン8、発電機4と、電池6から、インバータ3を介して主交流電動機2に給電する鉄道車両1において、省エネルギー運転と電池6の長寿命化を図る。
【解決手段】路線データに基き、各地点での目標速度を表わす速度パターン161を作成し、この速度パターンと勾配データ162を用い、各区間での回生エネルギー量を予測する。この予測回生エネルギーが規定値より大きい前方区間の存在により、力行時に、より低い電池残量範囲まで、放電出力を許容(163⇒164)するようエンジンと電池の出力分担制御を切替える。これにより、エンジン燃料を無駄に消費せず、回生エネルギーを最大限に活用した省エネルギー運転を実現できる。また、電池残量を極力中間レベルに保つように制御することにより、電池の長寿命化を図ることができる。
(もっと読む)
移動体駆動装置
【課題】一定速走行中における操作者の負担を軽減し、快適に移動体を駆動することができるようにする。
【解決手段】車速マップ記憶部34には、操作者の手が把持部20に載せられたときに力センサ22によって計測された重力方向の荷重と標準速度とが対応し、かつ、重力方向の荷重が大きくなるに従って、車速が速くなるように定められた重力方向の荷重と車速との関係を示す車速マップが記憶されている。操作者の手を把持部20に載せた状態で、操作者側から把持部20に荷重を作用させると、力センサ22によって、把持部20に作用する重力方向の荷重を計測する。そして、速度変換部40によって、車速マップに基づいて、力センサ22によって計測された重力方向の荷重を車速に変換し、駆動制御部42によって、速度変換部40によって変換された速度で電動車椅子10が移動するように、駆動部16を制御する。
(もっと読む)
列車制御システム
【課題】 データベース容量を大きくすることなく、一部区間における路線情報の変更があった場合でも、容易にかつ安全に対応することのできる列車制御システムを提供する。
【解決手段】 列車3が停車する駅1間の路線情報が格納された路線データベース6と、地上送受信装置8と、地上制御装置5とを備えている地上装置2と、
車上送受信装置11と、車上送受信装置11で受信した路線情報を格納するデータ格納部12と、データ格納部12に格納された路線情報に基づいて列車3を制御する車上制御装置14とを備えている車上装置4と、を備え、
地上制御装置5は、地上判定部9により路線情報が正しいと判定された場合に地上送受信装置8を介して出発許可信号を列車3に送信するとともに、信号機10を進行現示に制御する。
(もっと読む)
列車制御装置
【課題】
安全余裕距離を追加することなく、且つ地上子の設置数が低減でき、乗り心地の良い安全な列車制御方法を提供すること。
【解決手段】
地上列車制御部と情報を伝送して列車を制御する列車制御装置において、予め車輪径の変動しうる最大車輪径及び最小車輪径と速度防護パターンとが格納された車上格納部を有し、最大車輪径と検出された車輪の回転数と地上子から受信された車両の位置情報とに基づいて、車両の現在の位置情報及び速度情報を生成し、現在の位置情報と地上列車制御部から受信された停止位置目標情報とに基づいて、車上格納部から対応する速度防護パターンを抽出し、抽出された速度防護パターンと、生成された現在の位置情報及び速度情報に基づいてブレーキ出力を出力する車上制御部を有する。
(もっと読む)
21 - 40 / 97
[ Back to top ]