
Fターム[5H115SF05]の内容
車両の電気的な推進・制動 (204,712) | 車両の制御 (610) | 速度制御 (326) | パターンを用いるもの (97)
Fターム[5H115SF05]に分類される特許
1 - 20 / 97
制御装置、通信制御装置及び列車制御装置、並びに列車制御システム
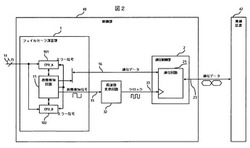
【課題】制御装置の故障検知時、通信回路が確実に回線から切断されるフェイルセーフな装置を簡易な構成により、実現する。
【解決手段】通信回路のボーレート生成用クロックとして、フェイルセーフ演算部の故障検知回路から出力される故障検知信号を使用し、演算部の故障検出時、誤出力等により通信先装置、システムに影響を与えないよう、故障検知信号を停止させることにより通信回路の動作を停止させ、装置を回線から切り離すように構成する。
(もっと読む)
素子寿命判定装置

【課題】電気自動車の収納部に収納されたインバータのスイッチング素子の寿命をより適正に判定する。
【解決手段】試験素子温度Tstmpから環境温度差ΔTest(j)を減ずることにより仕向け地での推定素子温度Tsest(j)を算出する際の環境温度差ΔTest(j)は、複数の環境温度下で所定の走行パターンで走行したときの外気温Tzの変化量に対するルーム内温度Taの変化量の割合を反映する第1感度αaと、試験環境温度Tstmpから仕向け地の最高気温を減じて得られる温度差ΔT(j)との積と、同じく外気温Tzの変化量に対する冷却水温Twの変化量の割合を反映する第2感度αwと、温度差ΔT(j)との積との和として算出される(S140)。これにより、仕向け地での推定地素子温度Tsest(j)をより適正に算出することができる。
(もっと読む)
定位置停止装置
【課題】列車を目標停止位置で確実に停止させる。
【解決手段】定位置停止装置10は、路線データベース13の路線データ13A、列車の速度を計測する速度センサ101からの速度情報101a、地上子102からの受信情報102aに基づき、列車の現在位置から目標停止位置までの停止速度パターン14Aを作成する停止速度パターン作成部14と、列車に設置された滑走検知装置104がその列車の滑走を検知すると、停止速度パターン14Aの速度より低速な滑走停止速度パターン15Aを作成する滑走停止速度パターン作成部15と、滑走停止速度パターン15Aまたは停止速度パターン14Aに従って列車の速度を制御する速度制御部12とを備えた。
(もっと読む)
走行制御支援方法及び走行制御支援装置
【課題】安全性を低下させることなく、コストをかけずに、警報時間の短縮効果が得られる走行制御を支援する。
【解決手段】列車2が踏切3に接近すると、車上装置21は、自らの列車2の位置・速度情報を所定の間隔で踏切制御装置31に送信する。踏切制御装置31は、車上装置21から受信する列車の位置及び速度に基づいて踏切到達予測時間及びブレーキパターン到達予測時間を算出する。また、踏切制御装置31は、予め記憶する設計警報時間と、算出される踏切到達予測時間を比較するとともに、予め記憶する踏切遮断完了時間と、算出される踏切遮断完了時間を比較し、所定の条件を満たす場合には警報を開始するように指示する。踏切制御装置31が、警報開始後に列車2を加速させる走行制御パターンを算出し、車上装置21に送信する。そして、車上装置21は、算出される走行制御パターンを乗務員に提示し、乗務員による走行制御を支援する。
(もっと読む)
列車制御装置
【課題】自動で走行試験用のノッチパターンに従って制御指令を出力することで正確なステップ応答データを得られる列車制御装置を提供する。
【解決手段】列車制御装置は、速度検出手段と、位置検出手段と、受信手段と、第1の出力手段と、特定手段と、第2の出力手段と、出力切換手段とを備える。前記第1の出力手段は、前記受信手段で受信された信号現示速度情報に基づいて、前記列車が駅間を走行し停止目標位置に停止するような第1制御指令を出力する。前記特定手段は、前記位置検出手段で検出された位置情報に基づいて、駅間における指定の距離範囲を特定する。前記第2の出力手段は、前記特定手段により特定された指定の距離範囲において、所定のノッチパターンに従って第2制御指令を出力する。前記出力切換手段は、前記第2の出力手段の第2制御指令及び、前記第1の出力手段の第1制御指令の出力中、前記第2制御指令を優先する。
(もっと読む)
定速走行制御装置
【課題】車両駆動制御装置に出力する定速走行制御装置において、上位の制限速度から下位の制限速度に移行させる際、正確な運行時間を維持した上で不要な加減速を防止して、下位の目標速度に円滑かつ確実に追随させる。
【解決手段】制限速度信号202が、制限速度の高い上位の制限速度信号から、制限速度の低い下位の制限速度信号に切り換わる場合に、上位の制限速度信号に基づく目標速度と下位の制限速度信号に基づく目標速度に基づいて、予め減速するのに必要な距離を算出し、車両がこの距離を走行する間に、車両の速度に応じて、車両のブレーキ量を所定の初期値から解除に到るまでに段階的に切り換えるようにした。
(もっと読む)
鉄道車両用蓄電池制御システム
【課題】蓄電池の電池容量の検出精度を向上する。
【解決手段】充放電可能な蓄電池と、電力変換器を有する鉄道車両用の蓄電池制御システムにおいて、力行運転中の蓄電池からの放電量、あるいは制動運転中の蓄電池への充電量に基づいて、充放電される電荷量を演算し、非充放電期間である、惰行運転期間あるいは停車期間において、所定の緩和時間経過後に、蓄電池の端子開放電圧を求める。そして、充放電される電荷量と蓄電池の充放電前後の充電率の変化とに基づいて、電池の容量を演算することにより、電池容量を演算する機会を増やすとともに、その精度を改善する。
(もっと読む)
列車位置検出装置
【課題】簡単な構成で列車の走行位置を車上で高精度に検出する。
【解決手段】速度発電機3からの信号によるTG位置とGPS受信機4からのGPS位置を比較して列車の位置を検出するとともに、検出した列車の位置を、加速度センサ5から出力する列車の上下振動信号と集音装置6から出力する音響信号の両方の波形特徴を抽出して車上装置2がレール継ぎ目や分岐部等の特異点を通過したときの特異点通過信号により補正して、GPS受信機4の測位精度が変化した場合、あるいは速度発電機3からの信号が車輪の空転や滑走などにより不正確になっても列車位置を補正して高精度に列車位置を検出する。
(もっと読む)
目標速度算出機能を備えた列車制御装置
【課題】ダイヤ通りの走行を条件として列車の目標速度を適応的に算出する列車制御装置を提供する。
【解決手段】自列車と先行列車との間の閉塞区間数である開通区間数の変更履歴を取得する第1の取得手段と、前記先行列車が在線する閉塞区間の1つ前の閉塞区間の終点を起点にブレーキパターンを設定する設定手段と、前記変更履歴に基づいて、前記先行列車が在線する閉塞区間を抜けるまでの時間を算出し、前記ブレーキパターンと抵触しない範囲での最高速度を前記自列車の目標速度として算出する算出手段とを備える。
(もっと読む)
自動列車運転装置
【課題】電気ブレーキと空気ブレーキとの配分に応じて複雑な調整を必要とせず、且つ外乱にも強い自動列車運転装置を提供する。
【解決手段】列車の速度を検出する速度検出部31と、列車の走行位置を演算する位置演算部32と、列車の目標速度を規定する速度パターン生成部33と、速度パターンと列車速度に基づきノッチ指令ntを生成するノッチ制御部34と、ノッチ指令ntに基づき列車速度を減少させる電気ブレーキ及び空気ブレーキからなるブレーキ装置35と、ブレーキ装置35が発生する減速力を推定する減速力推定部(ブレーキモデル)37a及び列車の減速度を演算する減速度演算部(車体逆モデル)37bを有しており、これら減速力及び減速度に基づき外乱τd^を推定する外乱推定器37とを備え、減速力推定部は、電気ブレーキと空気ブレーキの動作状態に応じてブレーキ装置35のパラメータを調整する。
(もっと読む)
運転支援装置
【課題】目標走行パターンを用いた運転支援において運転者の受ける違和感を抑制する運転支援装置を提供することを課題とする。
【解決手段】走行予定経路の先読み情報に基づいて走行予定経路における目標走行パターンを設定し、当該目標走行パターンに追従するように運転支援を行う運転支援装置1であって、運転者の運転操作の履歴に基づいて運転支援を行うことを特徴とし、運転者の運転操作の履歴に基づいて運転支援制御のON/OFFを切り替えたり、あるいは、運転者の運転操作の履歴に基づいて目標走行パターンを設定する。
(もっと読む)
列車制御システム
【課題】加減速性能と省エネ性能を両立するハイブリッド鉄道車両の列車制御システムを提供する。
【解決手段】エネルギー供給源101とエネルギー蓄積装置102に対する出力指令を行う列車制御装置111を備えた列車制御システムにおいて、現在時刻と車両の現在速度及び現在位置で定まる車両状態とデータベース112に含まれるデータとエネルギー蓄積装置102の状態を入力とし、エネルギー供給源101に対する出力指令とエネルギー蓄積装置102に対する充放電指令と駆動装置103に指令する目標減速度とを出力して、ダイヤの余力と走行状態により変化する必要な加減速性能に応じて充放電管理条件を変更する。
(もっと読む)
架線レス車両の運行支援装置
【課題】本発明の目的は、架線レス車両のエネルギー効率を向上させるような速度パターンを算出することが可能な架線レス車両の運行支援装置を提供することである。
【解決手段】本発明は、架線レス車両の運行ダイヤ情報と走行区間上にある次駅の情報と走行区間上にある複数の信号機の情報とを予め記憶する記憶手段2と、運行ダイヤ情報と次駅の情報と複数の信号機の情報とに基づいて架線レス車両の速度パターンを算出する速度パターン算出手段3とを備え、速度パターン算出手段3は、架線レス車両が最初の信号機で止まらないことと、現在停車中の駅から発車する際について一定の加速度aで加速を行うことと、加速後は架線レス車両が一定の第1の速度V1で走行することとを満たす速度パターンを算出するようになっている。
(もっと読む)
電気車制御装置
【課題】 列車の惰行走行時や停止時も回転子位置や周波数を推定可能な電気車制御装置
を提供することを達成する。
【解決手段】 永久磁石同期電動機1を駆動制御する装置において、永久磁石同期電動機
1の電圧値を検出する電圧センサ2から得た情報を電気車の駆動制御に用いる。本発明の
電気車制御装置は、電力を直流から交流に変換するインバータ5と、前記インバータ5か
ら供給される交流電力により駆動される永久磁石同期電動機1と、前記永久磁石同期電動
機1の電動機電圧を検出する電圧センサ2と、前記インバータ5と前記永久磁石同期電動
機1を開放する開放用接触器3と、前記電圧センサ2から得た電動機電圧を元に前記電気
車の駆動制御に用いる手段を備える。
(もっと読む)
自動列車運転装置および自動列車運転方法
【課題】列車速度が運転曲線に対して乖離した場合であっても、列車の運転時分への影響を軽減することが可能な自動列車運転装置および自動列車運転方法を得る。
【解決手段】運転曲線23として、運転計画に沿った通常運転曲線41と、運転計画からの運転遅延を回復させる回復運転曲線42とが設定され、運転曲線23から得られる目標速度24に列車速度26を追従させる自動列車運転装置21において、通常運転曲線41から得られる目標速度24に追従する運転を行っている列車20の列車速度26が、目標速度24を下回り、かつ、所定の速度差が生じた場合、運転曲線41を、通常運転曲線41から回復運転曲線42に切替え、回復運転曲線42から得られる目標速度24に列車速度26を追従させる運転曲線切替部12を有する。
(もっと読む)
自動列車制御装置および列車制御方法
【課題】地上装置あるいは車上装置の無線機能がシステムダウンした場合であっても、通常運転への移行時間を短縮することが可能な自動列車制御装置および列車制御方法を得る。
【解決手段】停止目標位置を演算する演算部9を有する地上装置7と、地上装置7から送信された停止目標位置を受信し速度制御パタ−ン16を演算して列車速度を制御する車上装置11、21と、を備えた自動列車制御装置であって、列車A、Bには車上装置11、21から送出された列車識別情報を送出する車上子12、22が設置され、路線には車上子12、22から送出された列車識別情報を受信する受信機能を有する地上子19、29が設置され、地上装置7は、地上子19、29が受信した列車識別情報と、地上子19、29の設置間隔に対応する列車B在線区間17および列車A在線区間27を管理する在線区間管理部10を有する。
(もっと読む)
列車制御システム,地上車上連携制御システム
【課題】遅延回復を図るために、各列車に目標を定めた運転を実施する場合に、目標を達成するために加減速の繰り返しが発生し、省エネルギーとは必ずしもいえない。このため、省エネ達成する適切な目標を定め、それに準じた制御を実施する。
【解決手段】地上装置と、前記地上装置が管理する領域内のすべての各列車上にある車上装置とをネットワークにより結んだ地上車上連携システムにおいて、前記地上装置は、前記各列車上にある車上装置から列車走行情報を入手し、内部にある処理装置にて、該当する後続列車に対する目標情報を作成し、前記各列車上にある車上装置に送付することで、前記各列車上にある車上装置は、送付されてきた、前記該当する後続列車に対する目標情報に従い走行することで解決する。
(もっと読む)
乗り心地改善型列車制御システム
【課題】朝ラッシュ等の列車密度が高い時間帯においても、列車の遅れを発生することなく、良好な乗り心地を実現する。
【解決手段】先行列車位置推定部12は、自列車位置検知部10により検知した自列車位置に基づき、制限速度情報保持部11に保持された情報から区間の始端位置と終端位置を検索して、自列車の在線区間を特定する。先行列車位置推定部12は、地上装置3からの制限速度と予告信号に基づき、制限速度情報保持部11に保持された情報を参照して、先行列車の位置情報を推定する。先行列車情報通知部13は、先行列車位置推定部12で推定した先行列車の位置情報を運転士4に通知する。
(もっと読む)
速度検出装置、速度検出方法及び列車速度検出システム
【課題】車上側での高精度の速度検出を維持しつつ、地上側の装置の簡素化を図ること。
【解決手段】走行路3には、列車5の進行方向に沿ってスリット部分である開口部12と遮蔽部11とが同一間隔Lで交互に現れるように形成されているパターンプレート10が配置されている。列車5には、前方/後方それぞれに、進行方向に沿って設置間隔D=「2L/3」をおいて配置された3個の検出器40を有する検出部30が設けられている。検出器40は、パターンプレート10の遮蔽部11及び開口部12のそれぞれの検出に応じた検出信号(パルス信号)を出力する。そして、車上装置50では、各検出部30について、各検出器40からの検出信号の変化からパルス幅が「L/3」となるパルス信号を生成し、列車5の速度Vを算出する。
(もっと読む)
無線列車制御システム,無線列車制御車上システムおよび無線列車制御地上システム
【課題】地上子を追加するのみで保安システムの存在しない区間から無線列車制御区間へ進入する列車を確実に検知することを目的とする。
【解決手段】無線列車制御システムにおいて、保安システムの存在しない区間と、無線列車制御区間とがある場合、保安システムの存在しない区間内に設置され、その設置位置から保安システムの存在しない区間と無線列車制御区間との境界までの残距離を算出可能な位置情報を列車に通知する地上子を有し、列車は、地上子から、位置情報、を受信する地上子検知装置と、地上子を検知すると基地局と通信を開始する車上無線機と、位置情報からシステム境界までに停止するブレーキパターンを作成し、基地局から列車制御情報を受信する列車制御装置と、を有し、列車制御装置は、位置情報と、ブレーキパターンと、列車制御情報と、に基づいて、保安システムの存在しない区間から無線列車制御区間への列車の進入を制御する。
(もっと読む)
1 - 20 / 97
[ Back to top ]