
Fターム[5H115SF13]の内容
車両の電気的な推進・制動 (204,712) | 車両の制御 (610) | 定位置停止制御 (118) | パターンによるもの (65) | パターンを車両の内部で演算するもの (35)
Fターム[5H115SF13]に分類される特許
1 - 20 / 35
列車制御装置及び地上装置
【課題】列車制御システムに、必要以上の情報量が流れることを防止し、各列車の高密度運行を可能とする。
【解決手段】実施形態にかかる列車制御装置は、走行する列車の位置情報を、地上装置に対して送信するとともに、前記地上装置から、前記地上装置が前記位置情報を基に算出した減速限界情報を受信する無線通信部と、前記減速限界情報に基づき、前記列車の速度照査パターンを生成する速度照査パターン演算部と、前記速度照査パターンの範囲内で前記列車が動くように前記列車のブレーキを制御する速度照査部と、前記位置情報を送信するごとに、基準距離を、前記列車の速度で走行するために要する時間を算出し、前記算出した時間をサイクル周期と決定する周期決定部とを備え、前記無線通信部は、前記サイクル周期で、前記位置情報を送信することを特徴とする。
(もっと読む)
列車制御装置及び地上制御装置

【課題】車上列車制御装置を変更することなく、列車の運転状況に合わせて、特定列車のみ制限速度を自由に変更することが出来る列車制御装置を提供する。
【解決手段】上位装置102から制限速度情報を受信した地上列車制御装置101の情報を伝送し、車上列車制御装置111で情報を受信することで列車104を制御する列車制御装置において、地上列車制御装置101は上位装置102から制限速度情報と制限速度を変更する列車番号(制限速度を変更する列車を特定する情報の一例)を与えられ、列車番号装置103から現在走行中の列車の列車番号を与えられ、双方から与えられた列車番号が一致する場合に、一致した列車番号の列車に対して、与えられた制限速度情報に対応した情報を作成し、車上列車制御装置111へ伝送することにより、列車の制限速度を変更する機能を有する列車制御装置とする。
(もっと読む)
自動列車運転装置
【課題】電気ブレーキと空気ブレーキとの配分に応じて複雑な調整を必要とせず、且つ外乱にも強い自動列車運転装置を提供する。
【解決手段】列車の速度を検出する速度検出部31と、列車の走行位置を演算する位置演算部32と、列車の目標速度を規定する速度パターン生成部33と、速度パターンと列車速度に基づきノッチ指令ntを生成するノッチ制御部34と、ノッチ指令ntに基づき列車速度を減少させる電気ブレーキ及び空気ブレーキからなるブレーキ装置35と、ブレーキ装置35が発生する減速力を推定する減速力推定部(ブレーキモデル)37a及び列車の減速度を演算する減速度演算部(車体逆モデル)37bを有しており、これら減速力及び減速度に基づき外乱τd^を推定する外乱推定器37とを備え、減速力推定部は、電気ブレーキと空気ブレーキの動作状態に応じてブレーキ装置35のパラメータを調整する。
(もっと読む)
列車運転制御方法及び列車運転制御装置
【課題】移動閉塞方式の列車運転制御における運転時隔の短縮。
【解決手段】列車20は、駅進入時には、先ず、停車駅の手前に設けられた待機位置に一旦停車する。また、待機停車中の後列車の位置から停止位置までの距離Lをもとに、待機位置を発車した後列車が、最短時間で停止位置に停車するための走行パターンが算出される。そして、駅に停車中の前列車が発車すると、続いて、待機位置に待機停車中の後列車が発車し、算出した走行パターンに従って運転制御される。すなわち、後列車は、加速時間t1の間、加速度αaでの加速運転を行い(加速期間)、次いで、惰行時間tiの間、惰行運転を行う(惰行期間)。その後、減速度βaでの惰行運転を行い(減速期間)、定められた駅の停止位置に停車する。
(もっと読む)
ハイブリッド車両
【課題】エンジンとモータの運転状態の変更による乗員への違和感を抑制するハイブリッド車両を提供することを課題とする。
【解決手段】エンジンとモータを備えるハイブリッド車両であって、車両に搭載され、実際の道路状況を取得する道路状況取得手段40,41と、道路データを記憶する記憶手段42と、道路データに基づいて目的地までの経路を設定する経路設定手段40と、道路データに基づいて経路設定手段40で設定された経路における走行パターンを設定する走行パターン設定手段30と、走行パターン設定手段30で設定された走行パターンに基づいてエンジン及びモータの運転スケジュールを設定する運転スケジュール設定手段30とを備え、道路状況取得手段40,41で取得された実際の道路状況と運転スケジュール設定手段30で設定された運転スケジュールに基づいてエンジン及びモータの運転を制御することを特徴とする。
(もっと読む)
車両運転装置
【課題】 様々な条件で走行する車両に対して、種々の走行状態あるいは周囲環境に対応する動特性モデルを選択することができ、適切な動特性モデルにより定位置停止制御の精度を向上させることができる。
【解決手段】 車両運転装置としての自動列車運転装置2は、車両としての列車1の運転を制御するための複数の動特性モデルを保持する動特性モデル保持部を有している。自動列車運転装置2は、複数の動特性モデルのうち当該車両の走行状態あるいは周囲環境を監視する動特性モデル切換部を有する。自動列車運転装置2の動特性モデル切換部は、上記のような監視の結果として得られる当該車両の走行状態あるいは周囲環境に応じた最適な動特性モデルを適宜選択する。自動列車運転装置2は、上記動特性モデル切換部が選択した最適な動特性モデルに基づいて制御指令部が当該車両の走行を制御する。
(もっと読む)
減速度比推定装置を有する列車制御装置
【課題】列車の減速動作中に実際の車両特性を計測し、この実際の車両特性に基づいて減速動作を制御し、列車を停止目標位置に精度よく停止させる。
【解決手段】車両特性保持手段4は、ブレーキ指令値に対応する標準減速度を車両特性データとして保持する。減速度比推定手段7は減速度算出手段6にて算出された減速度と、車両特性保持手段4にて保持された標準減速度との比を示す減速度比を算出する。制御指令算出手段8は、前記減速度比算出手段にて算出された減速度比を用いて、前記車両特性データを更新し、列車速度及び位置と前記更新された車両特性データに基づいてブレーキ装置へのブレーキノッチ指令値を算出する。
(もっと読む)
列車制御システム
【課題】定位置停止制御が精度良く行える列車制御システムを提供する。
【解決手段】本発明は、検出した列車速度、列車位置、ブレーキ指令、ブレーキ特性モデル、モデルパラメータに基づいて列車を定位置に停止させるためのブレーキ指令を決定し、かつ、減速の前半部で充分減速するブレーキパターンにしてブレーキ制御する列車制御システムを特徴とする。
(もっと読む)
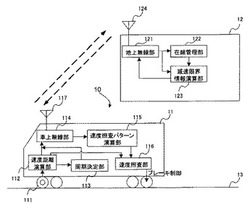
運行予測情報提供システム、地上情報処理装置および車載情報処理装置
【課題】列車運休等により運転整理が行われた場合または事故等により列車運行が乱れた場合でも、より高精度な運行情報を得ることができる運行予測情報提供システムを得る。
【解決手段】本発明の運行予測情報提供システムは、地上情報処理装置200が、ダイヤ情報および予測走行パターンにから信号情報の遷移を示す信号情報遷移ファイルを作成し、信号情報遷移ファイル基づき列車の相互影響を考慮して予測走行パターンを修正し、修正された予測走行パターンを車載情報処理装置100に送信するとともに車載情報処理装置100から予測走行パターンを受信し、車載情報処理装置100が、自列車の予測走行パターン、位置および速度に基づいて自列車の予測走行パターンを修正し、修正された予測走行パターンを地上情報処理装置200に送信するものである。
(もっと読む)
過走防護パターン追従機能を備えた自動列車運転装置
【課題】過走防護パターンの速度より低い速度で安全に列車を停止させると共に、運行遅れを生じない列車自動運転を実現する。
【解決手段】ATO部11は、OPRトリガ信号に応答してOPRパターンを算出し、該ORPパターンより低い目標減速パターンを生成し(ステップS208)、前記目標減速パターンに従って列車が走行して停止するように制動指令を出力する(ステップS209、S210)。
(もっと読む)
列車制御装置
【課題】列車の走行中、車輪の空転や滑走を未然に防止し、再粘着制御を不要にすることを課題とする。
【解決手段】列車制御装置は、路線条件データ及び車両条件データと速度・位置信号に基づき加減速度指令算出する手段と、車輪の空転・滑走を検知する手段と、路線条件データと空転・滑走検知信号と速度・位置信号とから空転・滑走の起こり易さを区間ごとに判定する手段とを備える。駆動/制動制御装置への加減速度指令値は、空転・滑走区間判定手段により判定された空転・滑走の起こり易さに応じて弱め方向に修正される。
(もっと読む)
走行制御装置
【課題】回生制動における最大減速度を考慮して低燃費化を図ることができる走行制御装置を提供する。
【解決手段】モータ43を発電機として作動させ回生制御によりバッテリ44を充電して制動するハイブリットシステム4を有する車両の走行制御装置1であって、減速時の速度域に応じて、回生制動装置による回生限界減速度の演算手法を変更する回生限界減速度演算部9と、回生限界減速度に基づいて減速区間の速度パターンを生成する目標速度パターン生成部10と、を備え、回生限界減速度演算部9は、減速時の速度が第1速度以上の第1速度域に属する場合には、バッテリ44の入力密度上限によって規定される回生力の制限に基づいて回生限界減速度を演算することにより、バッテリ44の入力限界特性を考慮して速度パターンを生成することができる。
(もっと読む)
定位置自動停止制御手段を備えた電気車両の制御装置
【課題】従来の定位置自動停止制御では、回生ブレーキと空気ブレーキを合わせた一定ブレーキ力による一定減速パターンによって車両を目標位置に自動停止させていたため、車両の運動エネルギーを空気ブレーキにより無駄に消費していた。
【解決手段】電気車両の制御装置の定位置自動停止制御手段に、主電動機の電力回生によって得られるブレーキ力の範囲で減速を行うことが可能な、全電気ブレーキ減速パターンをあらかじめ持たせ、この全電気ブレーキ減速パターンに従って、車両を目標位置に停止させる。定位置自動停止制御を回生ブレーキのみで行うことで、空気ブレーキによる運動エネルギーの無駄な消費を避けることができ、さらに、空気ブレーキの使用頻度も減る為、ブレーキシューの磨耗を抑える事ができる。
(もっと読む)
自動列車制御装置および自動列車制御方法
【課題】車輪の空転や滑走が発生する場合においても、車軸の回転数から求められる自列車位置の算出精度を向上させることが可能な自動列車制御装置および自動列車制御方法を得ること。
【解決手段】回転数取り込み部5aは、自列車に編成されている全ての車両の全ての車軸の回転数を取り込み、最高位速度選択部5bは、回転数取り込み部5aにて取り込まれた車軸の回転数の中から、最高位速度を示す回転数を選択し、速度・残走距離演算部5は、最高位速度選択部5bにて選択された最高位速度を示す回転数に基づいて、現在の自列車位置からの残走距離を算出し、減速パターン演算部8は、現在の自列車位置からの残走距離分の区間において自列車を所定速度に減速させる速度パターンを求める。
(もっと読む)
列車制御装置
【課題】 列車の性能に応じた適正な速度照査パターンを生成することができ、極めて効率のよい速度制御を行うことのできる列車制御装置を提供する。
【解決手段】 列車1の位置を演算する列車位置演算部7と、列車性能が格納された車両データベース8と、線路情報が格納された線路データベース9と、列車位置演算部7からの列車位置情報、車両データベース8からの列車性能および線路データベース9からの線路情報をそれぞれ入力して、線路の速度制限区間に対する速度照査パターンを生成するパターン生成部10とを備えている。
(もっと読む)
列車制御システム
【課題】 データベース容量を大きくすることなく、一部区間における路線情報の変更があった場合でも、容易にかつ安全に対応することのできる列車制御システムを提供する。
【解決手段】 列車3が停車する駅1間の路線情報が格納された路線データベース6と、地上送受信装置8と、地上制御装置5とを備えている地上装置2と、
車上送受信装置11と、車上送受信装置11で受信した路線情報を格納するデータ格納部12と、データ格納部12に格納された路線情報に基づいて列車3を制御する車上制御装置14とを備えている車上装置4と、を備え、
地上制御装置5は、地上判定部9により路線情報が正しいと判定された場合に地上送受信装置8を介して出発許可信号を列車3に送信するとともに、信号機10を進行現示に制御する。
(もっと読む)
列車制御装置
【課題】
安全余裕距離を追加することなく、且つ地上子の設置数が低減でき、乗り心地の良い安全な列車制御方法を提供すること。
【解決手段】
地上列車制御部と情報を伝送して列車を制御する列車制御装置において、予め車輪径の変動しうる最大車輪径及び最小車輪径と速度防護パターンとが格納された車上格納部を有し、最大車輪径と検出された車輪の回転数と地上子から受信された車両の位置情報とに基づいて、車両の現在の位置情報及び速度情報を生成し、現在の位置情報と地上列車制御部から受信された停止位置目標情報とに基づいて、車上格納部から対応する速度防護パターンを抽出し、抽出された速度防護パターンと、生成された現在の位置情報及び速度情報に基づいてブレーキ出力を出力する車上制御部を有する。
(もっと読む)
無接点主幹制御器
【課題】ATO/TASC制御機能を有するとともに、設置スペース及び艤装配線の削減を可能とする無接点主幹制御器を提供する。
【解決手段】鉄道車両に搭載される無接点主幹制御器であって、外部入力に基づき鉄道車両を制御するための主幹制御器センサ信号を生成する機構部2と、鉄道車両の車輪の回転に基づき鉄道車両の速度情報信号を生成する速度発振機5と、機構部2により生成された主幹制御器センサ信号と速度発振機5により生成された速度情報信号とリアルタイムに入力され鉄道車両の運転条件を設定する伝送情報信号D2とに基づき鉄道車両の駆動及び制動を制御するノッチ指令信号を生成する制御部34aとを備える。
(もっと読む)
列車速度制御装置
【課題】空走中に列車が加速する場合においても適切な制御を行うことができる列車速度制御装置を提供する。
【解決手段】列車速度制御装置は、空走時間中は列車1が惰行しているものとして、目標減速パターン109上の各点から、その点での勾配を考慮した惰行による空走時間中の移動距離110分だけ前へ移動し、さらに、空走時間中の速度変化111分だけ差し引いた点を結んだ曲線を、ブレーキ指令パターン108として算出する。
(もっと読む)
列車制御システム
【課題】走行時間を長くすること無く、またTASC装置が故障したときにも、運転士の負荷を増大させること無く、デジタルATC装置の制御とTASC装置の制御とが干渉しないようにさせながら、安定した定位置停止制御を行わせる。
【解決手段】デジタルATC装置9aの1段ブレーキ制御で使用する減速プロファイルを、TASC装置10aの減速プロファイルよりも高速側に設定し、最高速度域から駅へのアプローチ時には、デジタルATC装置9aの1段ブレーキ制御で減速し、低速域の駅定位置への停止時には、TASC装置10aによる定位置停止制御で減速させる。
(もっと読む)
1 - 20 / 35
[ Back to top ]