
Fターム[5H115SJ15]の内容
車両の電気的な推進・制動 (204,712) | 設定手段 (480) | 車両の内部に設定手段があるもの (322) | 方向転換指令 (13)
Fターム[5H115SJ15]に分類される特許
1 - 13 / 13
移動体、及びその制御方法
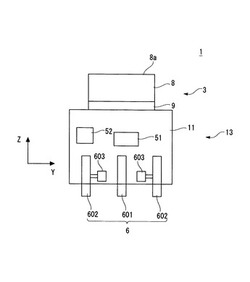
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者の体重移動に応じて移動する移動体であって、搭乗者の大腿部の下方が空間となる座面を有する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席8の座面8aに加わる力に応じた計測値を出力する力センサ9と、力センサ9からの出力に応じて、車輪6を駆動するための指令値を算出する制御計算部51と、を備えたものである。
(もっと読む)
移動体、及びその制御方法

【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席の座面に加わる力に応じて、ヨー軸周りのモーメント、ピッチ軸周りのモーメント、及びロール軸周りのモーメントに対応する計測信号を出力するセンサと、ピッチ軸周りのモーメントに基づいて、並進成分を算出する並進成分算出部55と、ロール軸周りのモーメントに基づいて、旋回成分を算出する旋回成分算出部54と、ヨー軸周りのモーメントに基づいて、その場旋回成分を算出するその場旋回成分算出部56と、並進成分と旋回成分とその場旋回成分とを合成して、移動機構を駆動するための指令値を算出する合成部57、を備えるものである。
(もっと読む)
車両
【課題】路面勾(こう)配を推定するとともに、推定値をその時間変化率に基づいて予測した未来の時刻における値に補正することによって、路面勾配が急激に変化しても、車体の姿勢や車両の走行状態を安定に保つことができ、より安全に、かつ、より快適に走行することができるようにする。
【解決手段】車体と、前記車体に回転可能に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の姿勢に基づき、路面勾配を推定するとともに、該路面勾配の推定値を、該推定値の時間変化率に基づいて補正する。
(もっと読む)
鞍乗型車両の制御装置、及び鞍乗型車両
【課題】車両の発進時や走行中の再加速時に搭乗者が感じる加速感に対する走行環境の影響を低減できる鞍乗型車両の制御装置を提供する。
【解決手段】自動二輪車は、エンジンの駆動力によって後輪を駆動させる後輪駆動装置と、前輪を駆動させるモータと、モータを制御する制御装置12とを備える。制御装置は、モータが出力する駆動力であるモータ駆動力と、当該モータ駆動力によって生じる車両の速度変化とに基づいて、前記モータを制御する。
(もっと読む)
車輌制御装置
【課題】倒立制御車輌において常に同じ制動、発進、加減速タイミング、或いは制動、発進、加減速フィーリングでの車輌操作を可能とする車輌制御装置を提供する。
【解決手段】本発明は、倒立制御車輌の車体傾斜角の角速度の制御を行う車輌制御装置であって、目標姿勢角を算出する目標姿勢角算出手段(ステップS305)と、目標姿勢角に応じた標準移動時間tCを算出する標準移動時間算出手段(ステップS306)と、目標姿勢角と現在の姿勢角との角度差ΔθCを算出する角度差算出手段(ステップS307)と、車体傾斜角速度[θ1*]を [θ1*]=ΔθC/tCによって算出する車体傾斜角速度算出手段(ステップS308)と、を有することを特徴とする。
(もっと読む)
倒立車輪型移動体、及びその制御方法
【課題】安全性を向上することができる倒立車両型移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる倒立車輪型移動体は、右駆動輪18、左駆動輪20を回転駆動するモータ34、36と、スイングアーム17、19を介してマウント26、28に対して回動可能に支持された搭乗席74と、搭乗席74を駆動するスライド機構68と、を備えている。制御部80は、モータ34.36又はスライド機構68の駆動力に基づいて、車体部77の重量を検知する。そして、車体部の重量がしきい値を越えた時、又はスライド機構68の駆動範囲の端に到達した時に、車体部を低くする。スライド機構の駆動力がしきい値を越えておらず、かつスライド機構68がスライドエンドに到達していない時に、倒立させつつ移動するように制御する。
(もっと読む)
電動車両
【課題】本発明は、駆動源として軽い電動機を採用し、回生エネルギーを効率的に利用する電動車両を提供する。
【解決手段】電動車両11は、左の車輪23、右の車輪24がそれぞれのハブ86に支持され、これらのハブにそれぞれの電動機(インホイールモータ)15、16の駆動力が伝えられて走行する。ハブと電動機15、16との間に介在させている外駆動力調節装置34、36と、外駆動力調節装置に対向させて電動機に接続している内駆動力調節装置33、35と、内駆動力調節装置同士33、35を接続している駆動軸28と、を備えている。内駆動力調節装置同士33、35のクラッチを作動させることで、右の車輪24と左のインホイールモータ15を接続できる。
(もっと読む)
車線追従制御装置およびこれを搭載した自動車
【課題】
車線追従制御装置作動中のドライバによる車線変更操作時に、違和感を感じさせないように適切なタイミングで車線追従制御動作を解除し、かつ車線変更時における車両走行安定性を確保する。
【解決手段】
車線追従制御装置1において、操舵角δを取得し当該操舵角の時間変化状態が所定条件に該当するか否かを検出し、当該操舵角の時間変化状態が車線変更操作によるものか否かを判断する運転モード判断部11と、運転モード判断部11が操舵角の時間変化状態が車線変更操作によらないものと判断したときは車線追従制御用の目標ヨーレートγcを生成し、運転モード判断部11が前記操舵角の時間変化状態が車線変更操作によるものと判断したきは車線変更制御用の目標ヨーレートγδを生成する制御部12と、少なくとも制御部12により取得した目標ヨーレートを制御パラメータとする車両制御信号Mを生成する車両運転制御部13とを備える。
(もっと読む)
走行装置及びその制御方法
【課題】段差部進入及び障害物の回避を良好に行うことができるようにする。
【解決手段】ベース300に独立した車輪301、302が設けられると共に、ジャイロセンサ、3次元加速度センサ及び圧力センサを組込んだセンサモジュール303が装備される。そしてセンサモジュール303の出力に応じてモータ304が制御され、車輪301、302が駆動される。また、ベース300には操作レバー305と、車両本体を牽引するための牽引アーム306が設けられている。そしてベース300には、2台の小型カメラ307、308を実装して路面の状況を測定し、その状況に応じて本体の姿勢を変化させ、障害物との衝突を回避する。さらにベース300には、補助車輪309と、そのアクチュエータ310が設けられ、減速若しくは停止時に駆動される。さらにベース300には、LED、ブザー等の表示装置311が設けられる。
(もっと読む)
制御装置及び車両
【課題】 周囲の状況に応じて適切に車両を旋回駆動させることのできる制御装置及び車両を提供すること。
【解決手段】 本発明の制御装置及び車両によれば、周囲状況取得手段により取得された車両周囲の周囲状況に応じて、その周囲状況に対して旋回中心及び旋回パターンが旋回パターン探索手段により探索される。そして、そのように探索された旋回中心及び旋回パターンに従って車両が旋回されるように、旋回制御手段によって、各車輪を独立して操舵駆動するアクチュエータが制御される。よって、車両の周囲状況が、運転者のハンドル操作及びアクセル操作で車両を旋回させることが困難な状況であったり、旋回範囲が限定されるような状況であったとしても、車両を適切に旋回させることができる
(もっと読む)
走行装置及びその制御方法
【課題】 障害物の回避を良好に行うことができるようにする。
【解決手段】 各距離センサ301〜304、301s〜304sの出力が距離計測器320に供給され、この計測器320で計測された距離Ld、Ldsと、旋回レバー310からのレバー角度の信号が中央制御装置330に供給される。そして中央制御装置330では、ジャイロセンサ、加速度センサ等の姿勢センサ回路340の出力信号と共に演算によりモータ駆動制御信号が形成される。この駆動信号がモータ制御装置351、352に供給されてモータ361、362が駆動され、これらの駆動力が減速機371、372を介してタイヤ381、382に伝達される。また、モータ361、362には二次電池電源回路390からの電源電圧が供給されると共に、これらのモータ361、362で発生される回生電力が回生コンデンサ391に蓄えられる。
(もっと読む)
電動車及び電動車駆動用制御プログラム
【課題】 簡略的な制御により駆動可能な電動車及び電動車駆動用制御プログラムを提供する。
【解決手段】 並進運動を示す正規化値Y'と、旋回運動を示す正規化値X'とが指示値入力部110から速度指示値計算部120に供給される。速度指示値計算部120は、正規化値Y'に基づいて、並進速度指示値Vg_trgを決定する。速度指示値計算部120は、旋回運動を示す正規化値X'と車椅子の並進方向速度Vgとから、車椅子の転倒を回避する(2−4)式を常に満足するような旋回角速度指示値ωφ_trgを決定する。速度指示値計算部120において決定された並進速度指示値Vg_trg及び旋回角速度指示値ωφ_trgは、
制御指令値計算部130に供給され、制御指令値計算部130において左右の駆動輪の制御指示値に配分計算されて、これがモータ制御部140を介してモータMR,MLが制御されて、駆動輪が制御される。
(もっと読む)
電気自動車の制御装置
【課題】 車両状態によっては急発進加速可能な電気自動車の制御装置を提供する。
【解決手段】 アクセル開度に応じてトルク指令値を演算するトルク指令値演算手段(ステップS1〜S3)と、前記トルク指令値に応じて電動機の出力トルクを制御する電動機制御手段(12)と、急発進加速を必要とする車両状態を検出する車両状態検出手段(ステップS6)と、を備え、前記電動機制御手段(12)は、前記車両状態検出手段(ステップS6)により検出された車両状態が急発進加速を必要としない状態である場合にはトルク指令値に対して所定の遅延を生じさせて電動機3の出力トルクを制御し、検出された車両状態が急発進加速を必要とする場合にはトルク指令値に対して所定の遅延を生じさせることなく電動機3の出力トルクを制御するようにした。
(もっと読む)
1 - 13 / 13
[ Back to top ]