
Fターム[5H180CC11]の内容
Fターム[5H180CC11]に分類される特許
541 - 544 / 544
自動車において障害物までの距離を検出する装置及び方法
本発明は、距離センサ(1〜6)及び制御ユニット(10)を有する、障害物(8、8’)からの自動車(7)の距離(A)を検出する装置(15)に関する。本発明の装置は、制御ユニット(10)が動的車両データを使用して自動車(7)がもうすぐ至る運転経路(11)の計算に適合されることを特徴とする。制御ユニット(10)はまた運転経路(11)内にある関係のある障害物(8’)と運転経路(11)の外部にある無関係な障害物(8)とを区別するのに適している。本発明はまた障害物(8、8’)からの自動車(7)の距離(A)を検出する方法に関する。
 (もっと読む)
(もっと読む)
緊急制動プロセス中に車両の運転者を支援する方法及び装置
本発明は、車両が、その走行方向の前方の検出領域内に位置する物体、特に先行車両との衝突を防止するために、緊急制動中に車両の運転者を支援する方法及び装置に関する。本発明の方法によれば、所定の緊急制動条件が満たされた場合に、また運転者が緊急制動プロセスを行おうとしていることが検出された場合に、車両(50)を減速するために設けられる制動手段が、運転者とは独立して起動され、緊急制動条件が満たされた場合に、緊急制動情報が車両(50)の運転者に伝達される。本発明によれば、緊急制動条件が満たされないときでも、検出領域(54)における現在の周囲状況又は交通状況に関する情報を車両(50)の運転者に通知する情報が伝達され、予め規定された情報条件が満たされた場合に、運転者への前記情報が調整される。  (もっと読む)
(もっと読む)
障害物存在可能性検出装置及び障害物検出装置
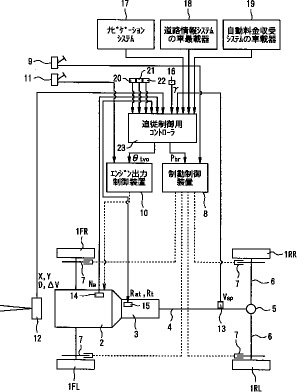
【課題】 障害物の誤検出を防止すると共に障害物の検出タイミングを早めることができるようにすること。
【解決手段】 自車両の走行環境をナビゲーションシステム17で検出し、その検出結果に基づいて、自車両前方に障害物が存在する可能性の大きさを検出し、車間距離センサ12で先行車両を継続して検出できた時間が先行車検知時間以上であるときに当該先行車両を走行車線上の障害物であると判断し、さらに渋滞等で障害物が存在する可能性が大きいときには前記先行車検知時間を小さくすると共に、前記可能性が小さいときには前記先行車検知時間を大きくするようにした。
(もっと読む)
車両の走行安全支援システム

【課題】 高速道路のインタチェンジの合流部付近での車両の走行の安全性を高める車両の走行安全支援システムを提供する。
【解決手段】 高速道路のインターチェンジの合流部付近の上及び支線と隣接する本線上を走行する車両の状況を把握するための画像センサと、この画像センサで撮像された画像から車両を認識して、その車両の位置、速度を検出する画像処理装置と、この画像処理装置で検出された車両状況から本線上において支線と隣接する第1車線を走行する車両に対して、せいぎょ情報を送るべきかどうか判定し、送るべきと判定したときに該制御情報をを作成する制御装置と、この制御装置で作成された制御情報を本線の上の第1車線を走行中の車両のドライバに注意情報として、表示する情報板とを具えた。
(もっと読む)
541 - 544 / 544
[ Back to top ]