
Fターム[5H220LL01]の内容
プログラマブルコントローラ (14,471) | 監視、試験、診断、異常検出の方法 (146) | 時間の監視を行うもの (37)
Fターム[5H220LL01]に分類される特許
1 - 20 / 37
プログラマブルコントローラシステム
【課題】観測ツールなどの接続を必要とせずに遠隔地で動作確認や解析を実施する。
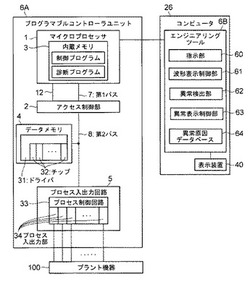
【解決手段】プログラマブルコントローラユニット6Aにおいて、マイクロプロセッサ1は、診断プログラムを実行し、アクセス制御部2は、そのアクセスに用いられる信号の波形をトレースした測定値トレースデータを生成し、マイクロプロセッサ1は、測定結果(測定値トレースデータ)をエンジニアリングツール6Bに送信する。エンジニアリングツール6Bは、測定結果に含まれる測定値トレースデータおよび異常原因データベース64に格納された期待値トレースデータを表すトレース画面を表示装置40に表示し、測定値トレースデータと期待値トレースデータとが一致しないときに、異常原因データベース64に格納された因果関係情報のうちの、上記アクセス時の異常の原因を同定する第1表示レベル情報をトレース画面上に表示する。
(もっと読む)
同期制御装置、同期制御方法、同期制御プログラム、および同期制御プログラムを記録したコンピュータ読み取り可能な記録媒体

【課題】従動軸に加わる衝撃を緩和し、かつ同期開始位置で確実に同期制御を開始することができる同期制御装置、同期制御方法、同期制御プログラム、および同期制御プログラムを記録したコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】ユーザ指令部62は、主軸と従動軸とが同期を開始する同期開始位置を指定する。カム曲線作成部64は、カム曲線を作成する。検出部65は、毎制御周期ごとの主軸の位置情報を検出する。制御部66は、同期開始位置までは、カム曲線と主軸の位置情報とに基づいて、制御周期ごとに従動軸に対する速度指令値を算出し、同期開始位置以降は、主軸と従動軸とのギア比に基づいて、制御周期ごとに従動軸に対する速度指令値を算出し、算出した速度指令値で従動軸を制御する。
(もっと読む)
プログラマブルロジックコントローラ
【課題】 保守点検時期を逃すことがなくなり、点検漏れによるトラブルを未然に防ぐことができるプログラマブルロジックコントローラを得る。
【解決手段】
稼動時間を計測するタイマ部と、このタイマ部により計測された稼働時間と、複数の保守点検項目毎に予め定められた保守作業必要期間とを比較し、いずれの保守点検項目に対応する保守作業必要期間が経過したかを判断する演算処理部と、上記演算処理部により期間が経過したと判断された保守点検項目に応じ、所定の表示を行う表示部と、を備える。
(もっと読む)
PLCのCPUユニット、PLC用のシステムプログラムおよびPLC用のシステムプログラムを格納した記録媒体
【課題】モーション制御機能を有するPLCにおいて、高速処理を要する一部のモーション制御処理のためには比較的短い周期の実行サイクルを確保しつつ、それ以外のモーション制御処理も一定周期で実行できるようにする。
【解決手段】システムプログラムは、制御サイクルの周期と同じ周期の第1実行サイクルごとに第1制御プログラムを実行開始させる第1実行制御命令と、制御サイクルの周期の2以上の整数倍の周期の第2実行サイクルごとに第2制御プログラムを実行開始させる第2実行制御命令とを含む。第2実行制御命令は、第2実行サイクルが開始する制御サイクルにおいて、第1制御プログラムの実行終了後に第2制御プログラムを実行開始させ、当該制御サイクルが終了するまでに第2制御プログラムが終了しなければ次の制御サイクルにおいて第1制御プログラムの実行終了後に第2制御プログラムの未実行の部分の実行を開始させる命令を含む。
(もっと読む)
コントローラサポート装置、その装置において実行されるためのコントローラサポートプログラム、およびそのプログラムを格納する記録媒体
【課題】コントローラが複数の制御プログラムをそれらの実行優先度と実行サイクルとに従って実行する場合に、コントローラの使用を支援するためのコントローラサポート装置において、より低い実行優先度の制御プログラムについても、実行サイクル周期との比較が可能である実行時間の情報を出力する。
【解決手段】コントローラサポートプログラムは、コントローラが制御プログラムを実行優先度と実行サイクルとに従って実行するときに、実行サイクルの開始からその実行サイクルにおける制御プログラムの実行終了までの間に経過する時間であって、コントローラにおいて測定された時間またはコントローラサポート装置において推定された時間である総計実行時間を取得する総計実行時間取得処理と、総計実行時間を出力するための出力処理とを、演算部に実行させる。
(もっと読む)
コントローラサポート装置、その装置において実行されるためのコントローラサポートプログラム、そのプログラムを格納した記録媒体、および、制御プログラムの実行時間を推定する方法
【課題】コントローラサポート装置において、コントローラにおける制御プログラムの実行時間をより高い精度で推定する。
【解決手段】コントローラサポートプログラムは、ユーザにおける制御目的に応じて作成された制御プログラムのソースプログラムである制御ソースプログラムから生成された、シミュレータにおいて動作するオブジェクトプログラムである第1制御プログラムの、シミュレータにおいて測定された実行時間である第1制御実行時間を取得する処理と、第1制御実行時間を較正データを用いて変換することにより、制御ソースプログラムから生成された、コントローラにおいて動作するオブジェクトプログラムである第2制御プログラムの、コントローラにおける実行時間の推定値である推定実行時間を算出する処理と、推定実行時間を表すデータを出力するための処理とを、演算部に実行させる。
(もっと読む)
制御装置およびシステムプログラム
【課題】マルチタスクで処理が行われている際に動作モードの切り替えを適切に行うことが可能な制御装置を提供する。
【解決手段】CPUユニット1は、複数のタスクを並行に実行するとともに、各タスクを各タスクに応じた周期で実行するタスク実行部21と、動作モードを切り替えるモード切替部22とを備える。タスク実行部21は、運転モード時に各タスクにおいてユーザプログラムを実行し、プログラムモード時に各タスクにおいてユーザプログラムを実行しないように構成されている。モード切替部22は、タスク実行部21により実行される複数のタスクが同期する際に、動作モードを切り替えるように構成されている。
(もっと読む)
プログラマブルコントローラにおける自己実行時間解析方法
【課題】CPUの負荷が増大してもサイクルタイムオーバーしないようにプログラム要素の実行時間を自動調整可能とする。
【解決手段】複数のプログラム要素の合計処理時間で一定時間のサイクルタイムが構成されるPLCにおける自己実行時間解析方法であって、上記プログラム要素における実際の実行時間と、当該プログラム要素における基準実行時間との時間差を解析する解析ステップと、その解析から上記両時間の時間差が無くなるように上記プログラム要素に対するロジック圧縮を実行するロジック圧縮ステップと、を含む。
(もっと読む)
スキャンタイム見積り装置、スキャンタイム見積りプログラム及び記録媒体
【課題】開発前のラダープログラムの処理時間の見積りの可能な装置を提供する。
【解決手段】スキャンタイム見積り部1は、所定のラダープログラムに対応し、かつ、所定の制御記述言語で記述された制御流れ記述を入力して構文解析し、構文解析結果に基づき制御流れ記述から工程カテゴリ、出力点数の組を抽出すると共に、構文解析結果に基づき制御流れ記述から命令とこの命令の使用数とを抽出し、命令と命令の使用数とを、対応するラダープログラムの命令と、ラダープログラムの命令の使用数とに変換し、工程カテゴリ毎ラダー命令数情報と、抽出されたカテゴリ、出力点数との組とに基づいて、ラダー命令ごとの推測使用数を決定し、決定された推測使用数と、変換された前記ラダープログラムの命令に対応するラダープログラムの命令の使用数とに基づいて、制御流れ記述の元になるラダープログラムのスキャンタイムの推定値を算出する。
(もっと読む)
プログラマブル表示器およびデータ表示プログラム
【課題】必要に応じて、最新のアラームのみ表示させたり、複数の同じアラームについての履歴を表示したりできるようにする。
【解決手段】アラーム表示処理部211は、アラームの時刻に関する時刻情報(発報時刻、確認時刻、復旧時刻)と、アラームの内容を表すメッセージ情報と、付加情報(発生回数、累積時間、レベル)とを含むアラームデータの履歴を一覧表示する。ソート処理部212は、アラームデータを付加情報に基づいてソートし、同一の付加情報を有するアラームデータの群に対して、アラームデータを同一のメッセージ情報を有するもの同士で並ぶようにメッセージ情報に基づいてソートする。間引き処理部213は、隣接する2つのアラームデータを時刻情報に基づいて比較し、同一のメッセージ情報を含むとき、古い方を削除し、さらに、付加情報に対しては間引き処理を行い、メッセージ情報や時刻情報に対しては間引き処理を行わないようにする。
(もっと読む)
プログラマブルコントローラ、及びプログラマブルコントローラにおける複数処理の時分割方法
【課題】通信処理と制御処理を1つのMPUで実行するプラグラマブルコントローラにおいて、通信における処理時間を予め設けたテーブルより算出することにより、動的に通信処理と制御処理を時分割する割合を変更し、MPUの処理能力を効率良く使用する。
【解決手段】通信処理と制御処理を1つのMPUで実行する場合、どちらの処理もある程度の応答性能を確保できるように時分割でこれら二つの処理を交互に行う必要があるが、通信を行っていない場合でも通信処理用に割当てた時間を確保する。通信要求を受付けた時点で、その通信処理に要する時間τ3を算出し、処理に要する時間だけ通信機能に時間を割当てる。これにより、通信を行っていない場合のアイドル状態をなくし、制御処理および通信処理のどちらも応答性能を向上させる。
(もっと読む)
プロセス制御システムのための一体型統合脅威管理
【課題】プロセス制御システムでネットワークセキュリティを強化する。
【解決手段】関連ネットワークトラヒックを受信するように設定され、外部ソースから受信されたルールセットを含むネットワーク装置を備える。ルールセットは受信したネットワークトラヒックを受入れ又は拒否する条件を定義する1つ以上のルールを含む。ネットワーク装置の状態はプロセス制御オブジェクト又は変数としてプロセス制御システムに組込まれ、状態、他のUTMS、構成要素ネットワーク装置、パラメータ、変数をグラフィックプロセス制御システム環境の中でワークステーションのオペレータに表示できる。ネットワーク装置は、更に最新のセキュリティ脅威、脅威パターン及びネットワーク内に存在することが分かっている又は予測される制御システムの脆弱性に対応するため装置に積極的にルールセットを提供する恒久的なサービスと通信できる。
(もっと読む)
システム異常の音声案内方式
【課題】ウォッチドッグタイマーによりCPUをリセットするに際して、モジュールを必要に応じてリセットして、システムの制御上の安全性を高める。
【解決手段】制御プログラムを実行するものでシステム異常時にシステム異常パルスを出力するウォッチドッグタイマー機能を有するCPU7と、モジュール2に強制リセット信号を出力するリセット回路9と、音声案内装置10と、を備え、CPUは、システム暴走時にはリセット回路を駆動制御することでモジュールを強制リセットする一方、音声案内装置10を駆動してシステム異常を音声で案内する。
(もっと読む)
二重化フィールド制御装置
【課題】制御権を円滑に切り替えることができる二重化フィールド制御装置を提供する。
【解決手段】CPU2Bの更新制御手段23は、CPU2Aのタイマクロック(Tick)が、CPU2Bのタイマクロック(Tick)よりも先行しているか否か判断する。判断が肯定されれば次のタイマクロック(Tick)について時間カウント処理をバイパスする。判断が否定されれば時間カウント処理によりアプリケーション時計21aを更新する。
(もっと読む)
プログラマブル・コントローラ
【課題】 サイクルタイム一定時間の値を短時間で最適な値に調整することを可能とすること。
【解決手段】 PLCの第2の運転可能モード(MON)では、周辺サービス処理におけるユーザプログラムの変更を許容しながら、一連の複数個のシステム処理が繰り返し実行され、かつ実サイクルタイムと比較されるべきサイクルタイム一定時間は、第1の運転可能モード(RUN)においては変更を禁止されているものの、第2の運転可能モード(MON)及び運転不能モード(PRG)においては、変更を許可されていること。
(もっと読む)
フィールド機器
【課題】複数の出力形態に対し容易かつ安全に対応できるフィールド機器を提供する。
【解決手段】フィールド機器1には、バス5との間での接続状態を切り替えるための出力段切替回路41と、バス5上の通信信号の有無および通信速度を検出するためのボートレート検出回路42と、が設けられる。さらに、フィールド機器1はフィールド機器1の各部に電力を供給するための電源回路43およびフィールド機器1の各部にクロックを供給するためのクロック供給回路44を備える。クロック供給回路44のクロック周波数は、通信速度に応じて切り替え可能とされている。
(もっと読む)
遠隔制御システム
【課題】 複数のローカル制御装置が、センターサーバに周期的にアクセスして、自己に接続されている被制御機器に対する制御コマンドを取得する構成で、複数のローカル制御装置の配下の被制御機器を一括制御できる遠隔制御システムを提供する。
【解決手段】 各ローカル制御装置3(3a,3b,3c)では、制御コマンド取得部31が、センターサーバ2に周期的にアクセスして、被制御機器4に対する制御コマンドを制御コマンド記憶部23から取得し、機器制御部33が被制御機器4を制御し、複数のローカル制御装置3による被制御機器4の制御を一括して行う制御指示が制御端末装置1からセンターサーバ2へ送信された場合、センターサーバ2では、制御コマンド生成部22が、複数の被制御機器4の制御を一括して行うための制御コマンドを被制御機器毎に生成し、制御コマンド記憶部23が、当該生成された複数の制御コマンドを記憶する。
(もっと読む)
制御装置、生産システム、制御方法、及び通信方法
【課題】制御装置がPLCから信号を受信するまでの待ち時間を有効活用することによりタイムロスを削減しつつ、従来と同等なPLCの生産システムを統括するための機能を併せて保障すること。
【解決手段】複数の制御装置301〜304と、前記各制御装置301〜304と通信するPLC101と、から構成される生産システム300において、前記制御装置301は、他の前記制御装置302が出力する第1の信号と前記第1の信号に対応して前記PLC101が出力する第2の信号とを受信する信号受信部203と、前記第1の信号に基づいて被制御装置104の動作を開始する被制御装置起動部204と、前記第1の信号と前記第2の信号とを照合し、照合した結果に基づいて前記被制御装置104の動作を継続又は停止する信号照合部205と、を有する。
(もっと読む)
自動機械の監視装置
【課題】 シーケンス制御される自動機械の動作を簡単に監視することができる装置を提供する。
【解決手段】監視に用いる基準データを作成するため、所定の回数、シーケンス制御装置によって自動機械を作動させ、自動機械が正常に動作するときの複数のデバイスのそれぞれが作動するタイミングを測定し、基準となるタイミングデータを作成する基準データ作成部を備える。自動機械の実働状態において、複数のデバイスの作動タイミングを検出し、検出された作動タイミングを基準となるタイミングデータと比較し、許容範囲内にあるものと、許容範囲外のものとを判別する判別部を備える。監視装置は、判別部によって許容範囲にあると判別された作動タイミングのデバイスと、許容範囲外と判別された作動タイミングのデバイスとを識別してディスプレイ装置に表示させる。
(もっと読む)
安全機器並びに安全条件設定支援システム
【課題】 実際に使用するネットワークシステムに合わせた最適な安全条件を求めることができるようにすること
【解決手段】 受信したフレームの通信時間を算出する通信時間算出部25と、その通信時間算出部で求めた通信時間を、通信相手の機器を特定するコネクションごとに記憶する通信時間テーブル26と、受信したフレームが、前回受信したフレームから何回目の送信フレームであるかを判定する送信回数判定部27と、その送信回数判定部で判定した送信回数の発生数を、コネクションごとに記憶する送信回数テーブル28と、受信した読み出し要求に伴い、通信時間テーブルに格納された通信時間に関する情報と、送信回数テーブルに格納された送信回数の発生数に関する情報を送信する手段とを安全機器22に備える。安全条件設定支援装置は、実測値に基づく情報を取得し、安全条件を求める。
(もっと読む)
1 - 20 / 37
[ Back to top ]