
Fターム[5H269QC02]の内容
Fターム[5H269QC02]に分類される特許
1 - 13 / 13
ロボット制御装置
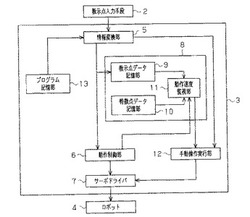
【課題】作業者が教示点の位置・姿勢を修正するための手動操作を行う際に、安価かつ簡単な構成で、位置・姿勢情報を修正することができるとともに、作業者への負担を軽減することができるロボット制御装置を提供することを目的とする。
【解決手段】ロボット制御装置3は、教示点の位置・姿勢を修正するための手動操作によるロボット4の動作速度を制御する動作速度制御部8と、手動操作に従って、ロボット4の動作を制御する動作制御部6とを備えている。動作速度制御部8は、ロボット本体のリンク上および作業ツール上に予め設定された特徴点と、特徴点の位置座標を表現するために設定された基準点との接近距離を算出するとともに、接近距離に基づいて、動作速度を決定する。動作制御部6は、決定された動作速度により、ロボット4を動作させる。
(もっと読む)
数値制御装置

【課題】確認者の時間的負担を軽減することの可能な数値制御装置を提供する。
【解決手段】軸方向選択スイッチにおいてZ軸マイナス方向が選択され、量選択スイッチにおいて50%が選択されている場合には、Z軸においてワーク(冶具)に近づく方向に工具が移動する際に、速度が加工プログラムに記載の速度の半分となる。矢印A、矢印B、矢印Eの3つの移動が500mm/分の速度となり、より遅く移動されることとなる。特定の移動(ワークに近づく方向の移動)についてのみ移動速度を遅く変化させ、それ以外の移動については通常の移動速度で移動させる。
(もっと読む)
可動部の操作装置及び操作方法
【課題】 設備又は装置の可動部を容易に操作することが可能な可動部の操作装置及び操作方法を提供する。
【解決手段】 可動部を有する設備等に対して、可動部に対する複数の移動目的地情報を記憶する記憶手段14と、可動部を移動させるための移動指示情報を入力する操作手段11と、可動部を撮影し、画像データを取得する撮像手段12と、移動指示情報に基づいて、複数の移動目的地情報から特定の移動目的地情報を決定する移動目的地情報特定部131と、移動目的地情報から可動部の移動目的地を決定する移動目的地決定部132と、可動部を移動目的地に移動させる移動指示部133と、移動目的地情報及び画像データに基づいて、可動部が移動目的地に移動したか否かを判定する移動終了判定部134とを有する制御手段134とを有するように、可動部の操作装置1を構成する。
(もっと読む)
工作機械、工作機械システムおよびそれらの制御方法
【課題】 軸移動などの制御やユーザが必要とする制御機能を安価な遠隔操作手段を用いて行うことのできる工作機械を提供する。
【解決手段】 本工作機械101は、安価な汎用品のUSBリモートコントローラ103を用いて、軸移動などの制御を行うことができ、さらにリモートコントローラ103の各操作キーに割り当てられている制御機能をユーザが簡単に変更できる。
(もっと読む)
数値制御装置、数値制御方法、及び制御プログラム
【課題】 工具、冶具、ワーク等を損傷させることなく、NC加工プログラムに基づく工具等の動作を確認することができる数値制御装置、数値制御方法、及び制御プログラムを提供する。
【解決手段】 複数の命令で構成された加工プログラムに従って、互いに直交する3軸方向に工具とワークとを相対的に駆動する複数の軸駆動部の動作を制御する数値制御装置において、加工プログラムによる軸駆動部の動作中の干渉の有無を確認する旨を示す情報が有る場合、軸駆動部の動作速度を、加工プログラムで指定した軸駆動部の動作速度より遅い速度に設定し、設定した速度で軸駆動部を動作させ、軸駆動部が動作中に、命令ごとに干渉の有無を判断し、干渉が有ると判断した場合、軸駆動部の動作を停止する。
(もっと読む)
切削再開方法、切削加工システム及び切削加工用制御装置
【課題】 加工再開にかかる時間を短くすること。
【解決手段】 切削加工システム(20)は、ユーザプログラム実行器(22)からのユーザプログラムポインタ、軌跡生成器(23)からのブロック内シーケンス、実行状態フラグ、および補間指令位置を、補間周期毎に順次記憶するバッファ(30)を備えている。切削加工中に中断した後に切削を再開する場合、切削加工システムは、中断した点から補間周期の倍数前の時点の記憶内容をバッファ(30)から読み出して、切削を再開する。
(もっと読む)
工作機械の制御装置
【課題】
工作機械の仕様が異なったり、同じタイプの工作機械であっても取付けられる制御機器が異なる仕様の場合であっても、主要制御部毎に分割された単一のモジュール制御装置を容易に組み合わせて工作機械の制御装置を構成する。
【解決手段】
複数のモジュール化された電源部と数値制御部と制御部を準備して、それらのモジュール制御装置の内いずれか1つづつを選択組み合わせて、それらの制御装置をコネクタで接続して容易に1組の制御装置と成す工作機械の制御装置。
(もっと読む)
安全信号I/F装置およびその二重化信号入力処理方法
【課題】 異なるアーキテクチャのハードウェア,ソフトウェアによって二重化された安全信号I/F装置であっても、入力処理にて同一タイミングの入力データを読み出すことができるようにする。
【解決手段】 外部からの二重化された安全信号を受信する1対の入力回路21、22とこれに対応する1対のCPU11、12との間にそれぞれ入力ラッチ回路81、82を接続し、ラッチのためのストローブ信号Sc1、Sc2は両CPU11、12から出力された信号Sa1、Sa2の論理和として入力されており,各CPU11、12にて入力処理の同期を取った後,それぞれのCPU11、12から双方の入力ラッチ回路81、82に対し,同時にストローブ出力を行って,その後ラッチされた入力信号を読み込むという手順で処理する。
(もっと読む)
ロボット教示装置およびその制御方法
【課題】使用者の挙動に則した安全性の高いロボット教示装置およびその制御方法を提供する。
【解決手段】教示装置(10)は、操作を規制する2つのデッドマンスイッチ(18,20)を備える。各スイッチは、押下ストロークの中程の所定範囲をイネーブルポジションに、その両側を非操作ポジションとオーバーポジションに設定している。これらスイッチ(18,20)は、少なくとも一方のスイッチがイネーブルポジションにある場合に装置(10)の操作を許容し、双方のスイッチが非操作ポジションまたはオーバーポジションにある場合に装置の操作を禁止する。装置(10)はさらに、これらスイッチ(18,20)の押下操作が行われたか否かを個別に検出する検出回路を含み、少なくとも一方のスイッチがオーバーポジションにある場合に、双方のスイッチの操作を無効にして装置の操作を禁止する。
(もっと読む)
機器の操作システム
【課題】入力操作部の操作による機器の作動を予めシミュレーションして外部表示装置に表示させ、初心者や初級者でも容易かつ正確に機器の操作を行えるようにする。
【解決手段】機器本体と接続される操作装置10と、外部表示装置61を用い、操作装置10は、入力操作部11と、前記入力操作部11の操作に関する情報を表示する小画面表示部31と、前記操作に関する情報を外部表示装置61へ出力し前記外部表示装置61で表示するための情報送信部51とを備え、前記情報送信部51から出力する前記操作に関する情報には、前記入力操作部11の操作による前記機器本体の作動について予め表示するシミュレーション情報を含めるようにした。
(もっと読む)
NC加工シミュレーション装置
【課題】NC加工プログラムのサイズ(工程数)に限界がなく、又、シミュレーションの再開を工程の途中から行うことができ、NC加工プログラムの工程途中からの加工によるワークの形状変化を確認することができるNC加工シミュレーション装置を提供する。
【解決手段】
NC加工シミュレーション装置10はNC加工プログラムにおけるシミュレーション再開位置を指定する入力操作部110を備える。シミュレーション再開位置に達する前までは、干渉チェック処理部230による、干渉チェックを中止し、モデル描画処理制御部240によるソリッドモデルの描画処理を中止する。シミュレーション再開位置に達した以後は、干渉チェック処理部230による、干渉チェックを行い、モデル描画処理制御部240によるソリッドモデルの描画処理を行って、画像データを生成する。
(もっと読む)
数値制御装置
【課題】 手動操作において、作業者がいかなる操作を行っても、移動可能範囲内にある干渉物、例えば素材、治具、心押台などとの衝突を回避できる数値制御装置を提供する。
【解決手段】 手動による軸移動操作に応じて工作機械の移動体を軸移動制御するための関数発生を行う関数発生手段を有する数値制御装置において、移動体の形状データと干渉の可能性のある干渉物の形状データとを記憶する手段と、手動による軸移動操作に応じた関数発生を開始する前に移動体の形状データを軸移動操作の移動方向に移動させて干渉物の形状データとの干渉の有無を確認し、干渉する場合、干渉位置から移動方向と逆方向に所望の距離だけ離れた軸移動停止位置を算出する干渉チェック手段とを有し、関数発生手段は、干渉チェック手段が干渉有と確認した場合、移動体を移動停止位置に停止するよう関数発生を終了する。
(もっと読む)
数値制御装置
【課題】電動機および制御対象に係わる振動を抑制しつつ応答を早める数値制御装置を提供する。
【解決手段】所定の周波数およびその近傍の周波数の利得を下げる特性と高域の利得を抑える特性を併せ持つフィルタに移動指令を作用させてサーボアンプ指令として出力するフィルタ部3と、前記移動指令とサーボアンプ指令を表示可能な表示手段5と、移動指令の加速または減速時間を操作者が変更することが可能な入力手段6とを備えた数値制御装置である。
(もっと読む)
1 - 13 / 13
[ Back to top ]