
Fターム[5H301BB12]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 用途、移動体の種類 (1,798) | 芝刈り機 (13)
Fターム[5H301BB12]に分類される特許
1 - 13 / 13
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
自律走行作業車の制御装置

【課題】走行予定領域の境界と走行予定領域における作業車の位置を簡易な構成で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】原動機(電動モータ)と、原動機に接続される駆動輪と、作業機(ブレード)とを備え、走行予定領域を原動機を駆動して自律走行しつつ作業する自律走行可能な作業車の制御装置において、方位(地磁気)センサの出力に基づいて絶対方位を検出すると共に、磁気ネイル(磁石)に対する位置を検出し、磁気ネイルの埋設位置を座標で示す地図情報と検出された位置に基づいて走行予定領域における作業車の位置を検出し(S12,S20,S32)、検出される絶対方位と作業車の位置とYawセンサなどの出力に基づいて算出される進行方位と走行距離に基づき、予め定められた作業プログラムに従って走行予定領域Aでの作業を制御する(S10からS46)。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
自己推進装置用格納式ライン案内
【課題】自己推進芝刈り機のような、自己推進装置のための格納式ライン案内を提供する。
【解決手段】操作部がストリングまたはラインを動かすことによって、この装置の移動速度および移動方向を制御する。引っ込み可能および伸長可能なラインが装置に取り付けられており、ラインが伸長しているときには、引っ込み方向に張力を受ける。ラインの伸長長を監視し、ラインの伸長長を選択長に維持するために、ラインの伸長長に応答して、装置の移動速度を制御する。装置に対するラインの角度を監視し、ラインの角度を選択角度に維持するために、ラインの角度に応答して、装置の移動方向を制御する。
(もっと読む)
自律移動装置
【課題】領域の塗り潰しを行う自律移動装置において、走行領域の形状に柔軟に対応して自然な移動で効率的に走行領域を塗り潰し可能とする。
【解決手段】自律移動装置の経路生成手段は、走行領域2を規定する2つの境界縁3と走行領域2における4つの領域定義点P0〜P3による2つの線分4とで囲まれた閉領域20が指定されると、閉領域20を所定の掃引幅Wで走行して塗り潰すために、線分4に沿って、既定の仮目的地P0〜P3に加え追加の仮目的地a,b(総称してK)を設定し、各仮目的地Kを経由するように経路Rを生成する。閉領域20は、当該閉領域の境界に位置する複数の領域定義点P0等によって走行領域2に柔軟に設定でき、領域定義点P0等を結んで成る線分と、状況に応じて援用される境界縁3とで囲まれた領域として定義される。自律移動装置は、仮目的地Kの位置を認識しつつ安定に塗り潰し移動できる。
(もっと読む)
自走式機器およびそのプログラム
【課題】機器本体と障害物との相対位置を確保して自動的に走行する自走式機器を提供すること。
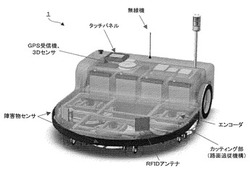
【解決手段】機器本体100周辺の障害物108を検知するセンサ部103と、障害物108に設置された無線タグ107から送信された無線タグ情報を読み取る無線タグ読取部105と、センサ部103及び無線タグ読取部105からの出力信号に基づいて移動手段102を駆動し機器本体100の移動を制御するコントロール部101と、無線タグ107へ情報を書き込む無線タグ書込部106とを備え、コントロール部101は、無線タグ017からの無線信号を受信した時、障害物108までの離間距離情報および機器本体の位置情報を、無線タグ書込部106を介して無線タグ107に書き込むように制御する。
(もっと読む)
自律移動装置
【課題】作業用の自律移動装置において、簡単な構成により、ユーザの思惑に違わない作業結果を実現可能とする。
【解決手段】自律移動装置1は、作業エリアと作業内容とに関するユーザからの作業指示に基づいて作業エリアまで自律的に移動して作業を行うため自己の各部を制御する制御手段2と、ユーザからの作業指示を受け取ると共にユーザに応答を表示する操作インターフェイス3とを備え、制御手段2は、操作インターフェイス3を介して作業指示が入力されると、作業エリアまでの移動時間とその作業エリアにおける作業時間とを見積もることにより作業指示に関する作業の遂行に必要な所要時間を推定し、その推定結果を操作インターフェイス3を介してユーザに提示する。制御手段2は、作業の遂行に必要な所要電力量を見積もり、電池残量検知手段4によって検知された電池10の残電力量と比較し、その比較結果をユーザに提示する。
(もっと読む)
自律走行装置とプログラムおよび記録媒体
【課題】センサ手段によらず障害物までの距離を正確に測定できる自律走行装置を提供することを目的とする。
【解決手段】障害物2までの距離を順次測定する第一のセンサ手段3と、障害物までの一定の距離を測定する第二のセンサ手段9と、センサ手段3、9から障害物までの距離を決定する第一、第二のセンサ距離決定手段6、10と、走行を行う部屋の位置ごとのセンサ出力量情報を記憶するマップ記憶手段7と、センサ距離決定手段6、10による障害物2までの距離情報とマップ記憶手段7のセンサ出力量情報とから第一のセンサ手段3のセンサ出力量を決定し、マップ記憶手段7へ出力するセンサ出力量決定手段8とを備えたものである。これによって、第一のセンサ手段3のセンサ出力量は、第二のセンサ手段9で調整されることになり、障害物までの距離を正確に測定できることになる。
(もっと読む)
自律走行装置
【課題】測定誤差をなくし、より正確に測定対象物の距離を知ることができる自律走行装置を提供することを目的とする。
【解決手段】超音波センサを有する複数のセンサ手段4、5と、センサ手段4、5のセンサ値を入力として測定対象物1の距離を測定する距離測定手段7、8と、走行装置Aの速度を測定する速度測定手段20と、距離測定手段7、8の距離と速度測定手段20の速度を入力として測定対象物領域を確定する測定対象物領域確定手段10とを備えたものである。これによって、測定時間に相当する距離を補正するので、より正確に測定対象物1の距離を知ることができる。
(もっと読む)
自律型ロボット用マルチモード処理方法及びシステム
【課題】従来技術では、マーカーやビーコンの複雑なシステムに依拠していたり、掃除範囲が単純な矩形状の室内に限定されており、擬似決定論的制御アルゴリズムを用いると、掃除されない空間領域が残される。
【解決手段】本発明の移動ロボットは、障害物追従モード、ランダムバウンスモード等を含む複数のモードで動作し、所与の領域を効率的に処理する移動ロボットの制御システムを有する。
(もっと読む)
自律移動装置
【課題】自律移動装置において、特定領域を自律的に走行してその全域を余すことなく効率的に塗りつぶすことを可能とする。
【解決手段】目的地Tの情報を及び走行領域2の地図を記憶する記憶手段と、周囲の物体との距離を検出する距離センサと、地図上の自己位置を取得する自己位置取得手段と、自己位置及び目的地Tをもとに走行経路を生成する経路生成手段と、生成した経路に基づいて目的地Tまで走行する走行制御手段とを備え、経路生成手段は、走行領域2の境界21に沿って進んだ方向に第1仮目的地P1を設定し、第1仮目的地P1の位置する境界に対し走行領域を挟んで略対向する他の境界近傍に第2仮目的地P2を設定し、この設定を交互に行うとともに各仮目的地を順次接続して走行経路14aを生成し、各第1仮目的地P1の設定に際して、距離センサにより検出して取得できる走行領域の境界形状に基づいて各第1仮目的地P1を設定する。
(もっと読む)
自律走行装置
【課題】部屋の床条件、家具配置条件などに関係なく、また部屋の構成に関係なく、走行装置本体を安定して走行することができる自律走行装置を提供することを目的とする。
【解決手段】走行装置本体2に設置してその位置を測定する位置センサ1と、位置センサ1より走行装置本体2の位置を推定する位置推定手段3と、位置推定手段3から走行装置本体2が走行する場所のマップを記憶する推定マップ記憶手段4と、推定マップ記憶手段4の記憶するマップに基づき走行装置本体2の走行制御を行う走行制御手段5とを備えたものである。これによって、走行装置本体2が走行した位置情報のみで部屋のマップを作成し、マップに従って走行装置本体2の走行制御を行うので、部屋の床条件、家具配置条件に関係なく、また、部屋の構成に関係なく、走行装置本体2を安定して走行することができる。
(もっと読む)
移動体
【課題】 安価で高精度に、閉じられた活動領域を設定された誘導予定経路に沿って移動することができる移動体を提供する。
【解決手段】 本発明の移動体1は、閉じられた所定の活動領域を自動的に移動する移動体であって、活動領域の地図情報を記憶する地図情報記憶部12と、地図情報記憶部12に記憶された地図情報に対応して移動体1の誘導予定経路を設定する誘導経路設定部13と、誘導経路設定部13により設定された誘導予定経路に基づいて移動体1を誘導制御する制御部17とを備えてなる。
(もっと読む)
1 - 13 / 13
[ Back to top ]