
Fターム[5H301HH18]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の操舵態様 (687) | 方向転換時の操舵 (99)
Fターム[5H301HH18]の下位に属するFターム
その場旋回を行うもの (58)
前進、後進を繰り返すもの (13)
Fターム[5H301HH18]に分類される特許
21 - 28 / 28
移動体の障害物回避方法及び該移動体

【課題】 移動体が円滑にかつ安全に自律走行でき、特に一般家庭等の不規則で乱雑な環境下においても障害物を安定的に回避することができ、さらに狭隘部においても走行不能状態に陥らない移動体の障害物回避方法及び該移動体を提供する。
【解決手段】 移動体10は、少なくとも側方センサと前方センサを複数組み合わせたセンサ群を有し、この検出データに基づき最適な移動経路を探索するようにし、該移動経路の探索にて、移動体進行向きを基準として複数段階の経路選択範囲を有する経路選択フィルタを設け、前記移動体の走行過程にて、予め設定された経路選択フィルタの移動経路範囲内で移動経路を選択するようにし、該移動経路範囲内に走行可能な移動経路が存在しない場合には段階的に該移動経路範囲を拡大するようにした。
(もっと読む)
移動機器

【課題】不特定多数の人が存在する空間において、機敏に動作可能であり、搬送対象物を容易に積載可能であり、かつ自律性を高めて安全に移動する。
【解決手段】移動台車の両側部に駆動車輪を設け、移動機器の揺動角を検知するジャイロセンサーからの信号により駆動車輪の回転制御を行うことにより移動機器の移動面に対する2次元的な移動および移動機器のピッチング方向の揺動角を制御し、かつ移動台車の上部に設けた門型フレームと、該門型フレームと移動台車との間に設けた搬送対象物を積載するの積載部と、該門型フレームの上部に外部環境を検知するための超音波センサーとを設置する構成により、移動台車の寸法を小さくでき移動時の操舵性を向上させ、積載部のスペースを大きく確保でき搬送対象物の積載が容易になり、移動機器の最上部にセンサーを配置することで人物の検出の死角を少なくでき自律性を高められる。
(もっと読む)
自走台車の走行制御方法
【課題】 本発明は、自在車輪を備える自走台車のスイッチバック動作時に、自在車輪の作用により自走台車に起きる左右の横揺れを低減する技術を提供することを課題とする。
【解決手段】 基本ライン51に沿って往復走行させることを基本とする自走台車10の走行制御方法において、走行制御部18は、方向変更指令を受けたときに停止時に操舵駆動輪12を所定角度θだけ操舵する第1操舵工程54と、この状態で所定距離Lを前進させることで基本ライン51から離脱させる工程55と、基本ライン51に向けて操舵する第2操舵工程56と、この状態で所定距離Lを前進させて基本ライン51まで自走台車10を戻す工程57と、自走台車10が基本ライン51に到達したときに操舵を戻して自走台車10を基本ライン51に沿って走行させる第3操舵工程58とからなる一連の制御を実施するものである。
(もっと読む)
ピッチ変調による車両制御
下地表面上の特定方向への運動に対する車両の前後安定化のための方法。車両は、少なくとも1つの前輪と少なくとも1つの後輪とを有し、前輪は車両の運動の瞬間的な方向に垂直である力により特徴付けられる。モーター作動器は、各々の後輪を駆動し、コントローラは、一律の制御規則に従い、該前輪が該下地表面と接触していても、そうでなくても、該車両を動的に安定化させるように、1つ以上のモーター作動器を支配する。トルクは、車両ピッチまたは運動方向に垂直な前輪にかかる力を基礎として、後輪に適用される。さらに、周期的な回転変調は、後輪に適用され得、車両ピッチまたは前輪にかかる垂直な力のどちらかについて検出された応答に基づいて安定しているトルクが提供される。左右のモーター作動器は、別個に左後輪および右後輪を制御し得、前輪がグランドに接触していても、そうでなくても、ユーザーの操縦により支配される通りにターンを続ける。 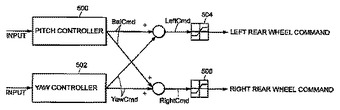 (もっと読む)
(もっと読む)
無人掃除機
無人でランダムに移動して床面を掃除でき、安価なコストで製造することができ、故障頻度を少なくでき、壁面に沿ってその近傍を掃除でき奥まった場所に入り込んでしまっても脱出することができる無人掃除機を提供する。
掃除機と、この掃除機が取り付けられるケーシング10と、このケーシング10の内部に、水平面内で旋回自在に取り付けられた走行部30と、ケーシング10および走行部を、互いに水平面内で旋回させる旋回機構50とから構成されている。前記走行部30が、水平軸廻りに回転自在に設けられたシャフト34と、このシャフト34の一端に、固定して取り付けられた駆動輪と、シャフトの他端に、回転自在に取り付けられた走行輪36とから構成されており、走行輪36とシャフト34との間に、クラッチ機構40が設けられている。  (もっと読む)
(もっと読む)
搬送車、搬送装置及び搬送車の制御方法
【課題】 走行ガイドに沿って走行し、障害物を自動的に迂回して走行できる搬送車、この搬送車を備えた搬送装置及びこの搬送車の制御方法において、走行ガイドを検知するガイドセンサの数を低減する。
【解決手段】 障害物センサ3aが障害物37を検知すると、障害物回避処理装置が無人搬送車1を停止させる。次に、車体2を障害物37から遠ざかるように、横方向に移動させると共に、ガイドセンサ移動装置4が、ガイドセンサ7が走行ガイド31を検知し続けるように、ガイドセンサ7を車体2の移動に対して逆方向に移動させる。その後、無人搬送車1を前方に移動させ、障害物37を迂回させる。
(もっと読む)
自走式作業ロボット
【課題】 いずれの方向から障害物に接触した場合にも適切、かつ、迅速に対応可能な自走式作業ロボットを提供する。
【解決手段】 床面を自走する走行アセンブリ1と、床に対する作業を行う作業アセンブリ2とを備えた自走式作業ロボットに関する。前記作業アセンブリ2の前面に障害物が接触したのを検知する第1の接触センサと、作業アセンブリ2の側面に障害物が接触したのを検知する第2の接触センサを設け、第1の接触センサの検知信号に基づいて、第1の退避速度で作業アセンブリ2を左右に移動させ、第2の接触センサの検知信号に基づいて第1の退避速度よりも低速の第2の退避速度で作業アセンブリ2を左右に移動させる。
(もっと読む)
自走式移動車
【課題】 実際に移動車を走行させながらその走行経路について学習させることで、ユーザが重点的に移動させたい範囲等のニーズに応じて、走行経路を柔軟に対応させることができる自走式移動車を提供する。
【解決手段】 初期走行(S44)、更には初期走行後の経路走行(S45)において、移動手段によって実際に辿った複数(n個)の経路についてユーザが入力手段を用いて評価を入力し(S46、S47)、制御手段は各走行経路に対するユーザの評価に基づいて走行経路について学習をする(S54)。このようなユーザの評価を受ける学習を繰り返すことで、走行経路は、例えば重点的に移動させたい範囲がある場合にその範囲内を幾度と通過する走行経路のように、ユーザが所望する経路となる。
(もっと読む)
21 - 28 / 28
[ Back to top ]