
Fターム[5H301JJ06]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の速度制御、起動・停止時の制御 (362) | 停止時に移動体の姿勢、向きを制御するもの (9)
Fターム[5H301JJ06]に分類される特許
1 - 9 / 9
移動ロボット
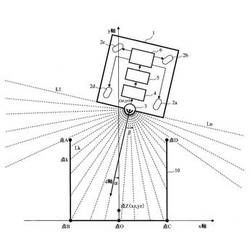
【課題】距離計測部を用いて高精度に位置決めを行う。
【解決手段】周辺物体までの距離と方向を計測する距離計測部3と、前記距離計測部が計測した周辺物体までの距離と方向を用いて目標物体の停止地点に対する当該移動ロボットの相対位置と相対方向を検出する相対姿勢検出部4と、前記相対位置と前記相対方向を用いて、前記移動機能部を制御する制御部5と、を備え、前記相対姿勢検出部は、前記目標物体を特定する線分を求めることにより、前記相対位置と前記相対方向を検出する。
(もっと読む)
車両

【課題】路面勾(こう)配に応じて車両の目標加速度を制限することによって、坂道であっても車体が路面に接触することなく、適切にバランスを保つことができ、路面勾配に関わらず、車両の安定した走行状態を実現することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面勾配に応じて車両加速度の目標値を制限するものであって、該車両加速度の目標値の制限値を、車体接地に対応する制限値と駆動トルクの最大値に対応する制限値とのうちの少なくとも1つに基づいて設定する。
(もっと読む)
自律移動ロボットのエレベータ乗降方法
【課題】周囲の環境などに影響されずに、エレベータ籠内の状態を感知し、人との共用を排他的に制限し、人のエレベータ利用時の安全性向上を図ることを目的とする。
【解決手段】上記目的を達成するために、本発明は、エレベータ籠に乗降して複数の階にわたる領域を自律的に移動する自律移動ロボットとエレベータ装置によるエレベータ乗降システムであり、前記自律移動ロボットは自身の周囲の環境を検出する環境センシング手段と、後述の乗降システム制御部と所定の信号の送受信を行なう無線通信手段を備え、前記エレベータ装置はエレベータ籠とエレベータへの搭乗するためにエレベータ籠を呼び出すエレベータ籠呼出部とエレベータ搭乗の出入口となるエレベータ扉とエレベータ籠の重量を検出するエレベータ籠重量検出部と、エレベータ籠を上下移動させるためのエレベータ籠巻上げ部とを備えることを特徴とする。
(もっと読む)
走行制御装置
【課題】車両を目標位置まで走行経路に沿って自律走行させる場合に、車両を目標位置に精度良く到着させることができる走行制御装置を提供すること。
【解決手段】走行制御装置100は、駐車予定エリアPKに車両1が到着するより前に、撮像エリアKFを第3カメラ26cにより撮像し、画像解析を行って目標とする駐車位置O’を再認識し、現在の車両1の車両位置などを補正して、既存の走行経路RT1〜RT3に沿って車両1を走行させる。走行経路を再生成すると、走行距離の長い走行経路が生成されるおそれがあるため、既存の走行経路RT1〜RT3に沿って車両1を走行させることで、走行距離が延びることを抑制でき、車両1が位置ずれを起こすことを抑制できる。よって、車両1が走行経路RT1〜RT3から外れることを抑制できるので、車両1を目標とする駐車位置O’に精度良く駐車させることができる。
(もっと読む)
無人搬送車および走行制御方法
【課題】作業番地への停止において、精度の高いコンベアへの横付けが可能な無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】コンベア12に設置されている反射板11へ光を照射し、反射板11から反射した信号光を受光することによって物体の存在を検出する光電センサを、無人搬送車1の側面前後にそれぞれ1つづつ備えるとともに、無人搬送車1とコンベア12とを検知する手段を備え、無人搬送車1の側面前後に備えられている光電センサの双方が反射板から反射した信号光を受光すると、操舵輪をコンベア12方向へ操舵し、無人搬送車1とコンベア12との距離が所定の距離となるまで無人搬送車1をコンベア12方向へ走行させることを特徴とする。
(もっと読む)
無人搬送車の横行姿勢補正装置及び横行姿勢補正方法
【課題】製造コストを安価に抑えることができる無人搬送車の横行姿勢補正装置を提供する。
【解決手段】車両の前側に設けられた駆動ユニットと後側に設けられた駆動ユニットとが異なる軌道を移動する横行モードを有する無人搬送車の横行姿勢補正装置であって、横行モード時に前側の駆動ユニットと後側の駆動ユニットが独立して停止位置で停止指令の有無を判定する停止判定手段(ステップS10,S20)と、停止指令を受けて、対応する前側の駆動ユニット又は後側の駆動ユニットが停止するユニット停止手段(ステップS11,S21)と、前側の駆動ユニット及び後側の駆動ユニットのうちで車両の移動方向に対して先行する駆動ユニットが停止指令を受けて停止後、後行する駆動ユニットが停止指令を受けて停止するまで、先行する駆動ユニットの停止状態を維持する停止維持手段(ステップS11,S21)と、を有する。
(もっと読む)
自律移動装置用の地図生成システムおよび地図生成方法
【課題】自律移動装置用の地図生成システムおよび地図生成方法において、ループ状の移動経路に沿う稼動領域に対しても容易に精度良く各部分領域の地図を整合させた地図を生成可能とする。
【解決手段】地図生成システム1は、入力手段2と、記憶手段3と、地図情報を編集して移動用地図を生成する地図情報編集手段4とを備え、移動用地図は、自律移動装置の稼動領域を構成する複数の部分領域毎に設定された少なくとも1つの特徴点を有する部分地図の集合として生成され、各部分地図が、実測によるそれぞれの特徴点の相互の位置関係に基づいて相互の配置を決定されて記憶手段3に記憶され、各特徴点間の配置を決定する拘束条件が、記憶手段3に記憶されることにより、地図情報編集手段4は、拘束条件を用いて特徴点間の相対的な位置関係を更新し、更新された位置関係によって部分地図を相互に結合した移動用地図を生成する。
(もっと読む)
搬送台車、停止位置判定方法およびプログラム
【課題】搬送システムが多数の装置を含んでいても、装置の設置位置変更を行なったときの搬送システムの立上げ、搬送システムの変更時に要する工数および時間を抑制できること
【解決手段】軌道を走行して停止し、被搬送物を支給する、または被搬送物を引き取るOHT搬送台車1において、基準画像記憶部は基準画像を記憶する。バーコード検出部33は、レール10に付されたバーコード25を検出する。走行距離測定部は、バーコード25からの走行距離を測定する。走行指示部は、走行距離が予め決められた距離となったときに、当該OHT搬送台車1を停止させる。CCDカメラ2は、OHT搬送台車1が停止したときに、レール10を含む画像を撮像する。停止位置判定部は、基準画像記憶部から読み出した基準画像とCCDカメラ2が撮像した画像とを比較し、これらの差異が基準値の範囲内であれば、目標停止位置に停止したと判定する。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】 各掃除領域の形状に応じて掃除走行パターンを可変的に適用することにより、掃除領域カバー率を向上させること。
【解決手段】 上記の目的を達成するための本発明によるロボット掃除機は、走行駆動ユニットと、掃除面の領域を検出する掃除領域検出ユニット、及び掃除領域検出ユニットを介して検出した情報に基づいて各掃除領域の形状に対応する螺旋形掃除走行パターンを算出し、走行駆動ユニットに算出した掃除走行パターンに対応する掃除走行信号を出力する中央処理ユニットと、を含む。
(もっと読む)
1 - 9 / 9
[ Back to top ]