
Fターム[5H301KK14]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 集中監視制御装置(局)が複数あるもの (41) | 各装置(局)が特定の制御を分担するもの (4)
Fターム[5H301KK14]に分類される特許
1 - 4 / 4
物品処理設備
【課題】物品の搬送を停滞なく適切に行えるようにしながらも、装備する無人搬送車の台数を減少させて設備の設置コストの低下を図ることができる物品処理設備を提供する。
【解決手段】外部搬出入部Bに位置する物品Pを自動倉庫Aの物品入出庫部2に搬送する物品搬入処理、及び、自動倉庫Aの物品入出庫部2に位置する物品Pを外部搬出入部Bに搬送する物品搬出処理を行うべく、無人搬送車担当経路における自動倉庫側に位置する倉庫側物品移載部F及び外部搬出入部側に位置する外部側物品移載部Gとの間での搬送作業を無人搬送車10に割り付ける搬送管理手段が、割込み要求が指令されたときには、倉庫側物品移載部Fと外部側物品移載部Gとの間での搬送作業の一部の搬送作業を、作業者によって運転される有人搬送車Mに割り付けるように構成されている。
(もっと読む)
処理設備

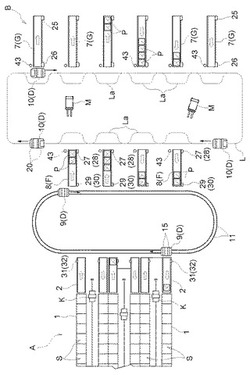
【課題】処理装置の制御負荷の増加を回避しながらも、処理作業効率の向上を図ることができる処理設備を提供する。
【解決手段】複数の処理装置1及び処理対象物を貯留する貯留装置Qを経由する搬送ラインに沿って走行して処理対象物を搬送する搬送車3を管理する搬送管理手段HCが、処理装置1から主管理手段JCに対して通信される処理進行情報を監視して、複数の処理装置1のうちで、処理対象物の処理が終了した又は終了間近である処理装置1を、主管理手段JCから搬送指令情報が通信されてくる以前に、事前搬送元として抽出し、その処理装置1から処理対象物を搬出するために、事前搬送元として抽出した処理装置1に対して搬送車3を走行させる事前搬送制御を実行するように構成されている。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて、下位のコントローラだけで運用試験を行うときに自動運転を可能にする。
【解決手段】搬送車システムは、搬送車を搬送させるための搬送車システムであって、複数のストッカ(51,53,55,57)と、搬送車(44,48)と、複数のコントローラ(52,54,56,58)とを備えている。ストッカは、内部で物品を搬送可能である。搬送車は、複数のストッカ間で物品を搬送可能である。複数のコントローラは、互いに通信可能であり、複数のストッカおよび搬送車を制御する。コントローラは、搬送制御部61と、シナリオ記憶部63と、搬送指令作成部62とを有している。搬送制御部61は、搬送指令を実行することで搬送制御を行う。シナリオ記憶部63は、複数の搬送指令作成情報を含む搬送パターンシナリオを記憶する。搬送指令作成部62は、搬送指令作成情報に対応する搬送指令を作成する。
(もっと読む)
無人搬送車の充電制御方法
【課題】 無人搬送車10が充電器13から充電を行っている間に、無人搬送車11と無人搬送車10との間に充電器が無い場合、無人搬送車11は、無人搬送車10が充電を終わるまで待機することとなり、作業能力の低下を招いている。
【解決手段】 無人搬送車10の進行方向がSlで次の充電ポイントまでに1台も他の無人搬送車が無くまた次の充電ポイントの充電器14が充電中で無い場合に上位コンピュータ2は充電終了の指示を給電用コンピュータ3に指示し、終了の指示を受けた給電用コンピュータ3は充電器13に対し充電終了を指示する。充電終了の指示を受けた充電器13は無人搬送車10に対し充電終了の指示を発行し無人搬送車10は現在の充電を終了し、次の充電ポイント14に向かう。
(もっと読む)
1 - 4 / 4
[ Back to top ]