
Fターム[5H301KK17]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 制御信号、検出信号の伝送手段の限定 (229) | 誘導経路作成手段を利用するもの (4)
Fターム[5H301KK17]に分類される特許
1 - 4 / 4
有軌道台車システム
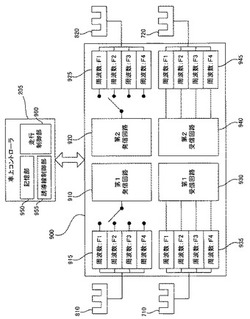
【課題】有軌道台車システムにおいて、分岐点及び合流点を通過する台車の不要な速度低下や走行停止を抑制する。
【解決手段】有軌道台車システムは、分岐点及び合流点を含む所定領域内に誘導線を有する軌道と、軌道に支持されると共に案内されて走行する複数の台車とを備える。複数の台車の各々は、互いに周波数の異なる複数の信号を夫々発信可能な発信手段910,920と、発信手段から発信された複数の信号を誘導線へと夫々送信する送信手段810,820と、誘導線を介して伝達された複数の信号を夫々受信可能な受信手段710,720と、受信手段において受信された信号の種類に基づいて、台車の減速若しくは停止、又は走行の続行を判定する判定手段955と、判定手段における判定結果に応じて台車の走行を制御する制御手段960とを有している。
(もっと読む)
無人車両の走行システムおよび走行経路生成方法

【課題】経由点を最適な地点に設定する。
【解決手段】走行経路10上にあって積込点12の手前のスイッチバック点13を、積込点12の位置移動に応じて位置移動する移動地点としてその初期位置情報を指示する。指示されたスイッチバック点13の初期位置情報と、積込点12の位置情報とに基づいて、積込点12とスイッチバック点13との相対位置関係Aの情報を生成する。積込点12の位置が移動すると、当該位置移動後の積込点12´の位置情報と、当該積込点12´における無人車両20´の向きの情報と、相対位置関係Aの情報とに基づいて、当該相対位置関係Aを維持できる位置に新たなスイッチバック点13´を設定し、新たなスイッチバック点13´を経て位置移動後の積込点12に至る走行経路10´を生成する。
(もっと読む)
商品購入システム
【課題】様々な人がより楽に買い物できる商品購入システムを提供する。
【解決手段】複数の購入者が購入者用端末10から入力したIDコードと購入希望商品を記憶し、その中からロボット装置30の利用可能な人数分のIDコードを選択する。選択したIDコードに対応する商品の位置を取得し、その位置データに基づいて、ロボット装置の移動経路を決定し、経路データを生成する。そして、選択したIDコードに対応する商品及び経路データを含む制御信号をロボット装置30に送信する。サーバ装置20から送信される制御信号に基づいて、ロボット装置30に陳列された商品から購入者の希望商品を籠35に収集させる。
(もっと読む)
搬送システム
【課題】 搬送台車同士の衝突を防止しつつ、搬送効率を向上することができる搬送システムを提供する。
【解決手段】 交差エリアに属する支線軌道22の入口に入口用バーコードリーダ15を設置し、読み取った搬送台車1bのバーコード4をコントローラ11の台車管理記憶部12に記憶する。また、交差点23に出口用バーコードリーダ17を設置して、読み取った搬送台車1bのバーコード4をコントローラ11の台車管理記憶部12から消去する。コントローラ11では、台車管理記憶部12にバーコード4が記憶されていない場合に、交差エリアに属する本線軌道21上に設置されている減速投光器14を作動させて、交差エリアに属する本線軌道21上を交差点23に向かって走行する搬送台車1aに対し、交差エリアに属する支線軌道22上に搬送台車1bがないことを告知して高速走行させる。
(もっと読む)
1 - 4 / 4
[ Back to top ]