
Fターム[5H303AA12]の内容
位置、方向の制御 (6,897) | 用途、利用分野 (700) | 輸送、運輸、物流システム (36) | 車両 (24)
Fターム[5H303AA12]の下位に属するFターム
自動車、内燃機関 (13)
無人搬送車、自動搬送車 (7)
Fターム[5H303AA12]に分類される特許
1 - 4 / 4
電動機の位置制御装置
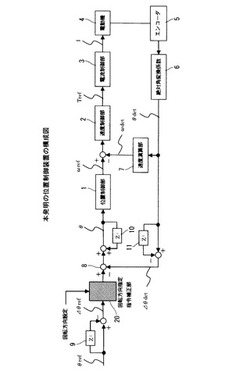
【課題】位置指令と位置検出の差演算に基づいて位置制御すると、任意の回転方向を指定しての位置制御ができず、また検出器の分解能によっては安定に位置制御ができない。
【解決手段】位置指令と1サンプリング分遅延させた信号との偏差信号を求め、この偏差信号と回転方向を設定する信号を入力して回転方向に対応して補正された信号を出力する回転方向指定指令補正部を設ける。回転方向指定指令補正
部により補正された信号と位置検出との偏差信号を求めて位置制御信号とする。
また、位置検出器の出力側に位置座標系変換部を設けることで、任意の座標系で位置制御を可能とする。さらに、分解能補正処理部を設けることにより安定性を向上することを可能としたものである。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置

【課題】車両燃費改善のため車両のエネルギーを有効に活用するための機構及びその制御方法で、PID制御に代わる新たな制御手法として、より簡便な方法で制御結果が得られるアクチュエータの制御方法及びアクチュエータの制御装置を提供する。
【解決手段】制御対象の運動エネルギーと制動可能仕事を比較し、前記制御対象の運動エネルギーと前記制動可能仕事が等しくなった時点で駆動から制動に切り替えると共に、前記制御対象の運動エネルギーと前記制動可能仕事の比較を予め設定した時刻毎に繰り返し行う「エネルギー評価制御」を行う。
(もっと読む)
エフェクタの軌道を制御するための方法
【課題】エフェクタの操作を簡略化し、追加的な制御制約条件の適用を可能にするエフェクタ軌道の制御方法を提供する。
【解決手段】本発明の提供するエフェクタ軌道を制御するための方法は、軌道の不変制御パラメータを求めるステップと、不変制御パラメータを含まないタスク記述によりエフェクタ軌道を表すステップと、タスク記述に基づいてエフェクタ軌道を制御するステップと、を含む。また、この方法において、エフェクタ軌道は、増分値を制御パラメータ空間から配置空間上にマッピングすることによって計算される。配置空間および制御パラメータ空間の間の次元差は、零空間の冗長な自由度を残している。
(もっと読む)
集積された運動量壁
軸を有するスラット(206)と、スラット(206)に配置された複数のマイクロホイール(204)であって、各マイクロホイール(204)は第1のステータウェーハ(208)と、第2のステータウェーハ(210)と、第1および第2のステータウェーハの間に配置されたロータウェーハ(212)とを有し、第1および第2のステータウェーハ(208、210)はロータウェーハ(212)をスピンさせる構成とされる複数のマイクロホイール(204)と、スラット(206)に接続されかつスラット(206)を少なくとも部分的に軸中心に回転させる構成とされるアクチュエータ(104)とを含むビークル制御システム(200)が提供される。 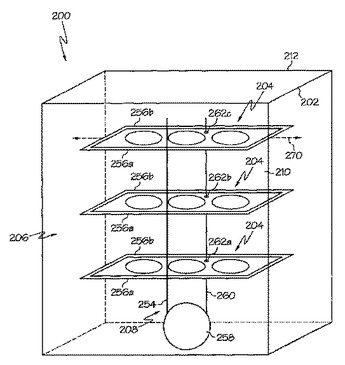 (もっと読む)
(もっと読む)
1 - 4 / 4
[ Back to top ]