
Fターム[5H303AA14]の内容
位置、方向の制御 (6,897) | 用途、利用分野 (700) | 輸送、運輸、物流システム (36) | 車両 (24) | 無人搬送車、自動搬送車 (7)
Fターム[5H303AA14]に分類される特許
1 - 7 / 7
制御方法、プログラム、記録媒体、及び、制御装置
【課題】複数の固有振動数が生じる場合において、運ばれる物体に移動装置の振動に伴う揺れを全く生じさせないことによって安定して確実且つ迅速に物体を運ぶことができる制御方法等を提供する。
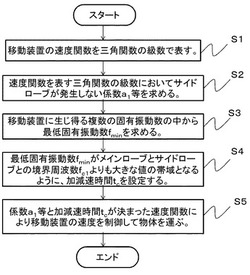
【解決手段】物体を運ぶ移動装置の速度関数を三角関数の級数で表し(S1)、三角関数の級数においてサイドローブが発生しない係数a1等を求め(S2)、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて最低固有振動数fminを求め(S3)、最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように加減速時間tcを設定し(S4)、係数a1等と加減速時間tcが決まって得られた速度関数により物体を運ぶ移動装置の速度を制御して物体を運ぶ(S5)。
(もっと読む)
モータ駆動装置の位置制御方法

【課題】位置比例積分制御系は、位置偏差の定常偏差を0にする利点があるが、モータ位置が指令位置を追い越すオーバーシュートがおきやすい欠点がある。
【解決手段】位置指令1とモータ位置2の差から位置偏差3を算出し、これに位置比例ゲイン4を乗じた位置比例出力5を計算する位置比例制御系に、速度制御指令8を速度制御モデル15に通したモデル出力16と、モータ位置2を速度検出器13で微分したモータ速度14の差をとり、一次遅れフィルタ17を通した出力を、再び速度制御指令8に加算する速度誤差補正機能を備える。
(もっと読む)
位置決め制御装置とその制御方法
【課題】 機械位置のフルクローズドループ制御でありながら、モータ位置を制御した時と同等の応答性と機械位置を制御したときと同等の精度を得ることができる位置制御装置とその制御方法を提供する。
【解決手段】 位置指令とモータ位置信号とのモータ位置偏差から速度指令を生成する位置制御部(1)と、速度指令とフィードバック速度信号との速度偏差からトルク指令を生成する速度制御部(2)と、トルク指令に基づいてモータを駆動するトルク制御部(3)と、モータ位置信号からモータ速度信号を生成するモータ速度信号生成部(4)と、モータ速度信号をフィードバック速度信号とするフィードバック速度信号生成部(5)と、を備えた位置決め制御装置において、位置指令と機械位置信号との機械位置偏差から補正位置指令を生成する補正位置制御部(6)と、補正位置指令をオンするスイッチと、オンオフされた補正位置指令と位置指令を加算して新たな位置指令を生成する加算器(17)と、を備えた。
(もっと読む)
搬送装置
【課題】駆動制御が複雑化するのを抑制しながら、温度変化に起因するワークの搬送位置の精度の低下を抑制する。
【解決手段】搬送装置では、制御機構25は、温度検出部31によって検出された支持ビーム4の内部空間の温度が所定の温度範囲よりも高い場合には、温風を支持ビーム4の内部空間に導入しないとともに冷風を支持ビーム4の内部空間に導入する一方、温度検出部31によって検出された支持ビーム4の内部空間の温度が所定の温度範囲よりも低い場合には、温風を支持ビーム4の内部空間に導入するとともに冷風を支持ビーム4の内部空間に導入しない機能を有する。
(もっと読む)
位置決め制御装置
【課題】エンコーダのプリセットに要する時間を大幅に短縮することができ、位置決めデータの記憶容量が制限されることが無い位置決め制御装置を提供する。
【解決手段】本発明にかかる位置決め制御装置20は、移動体を駆動するサーボモータ13と、サーボモータ13の回転量を検出するインクリメンタル型のエンコーダ21と、位置決め制御信号とエンコーダ21からの検出信号を受けてサーボモータ13を駆動制御するサーボドライバ22と、直線軌道における移動体の位置を計測するレーザ距離計23と、移動体の位置決めデータを記憶していてサーボドライバ22に位置決め制御信号を出力する制御装置16と、を備え、制御装置16は、電源投入後、移動体の位置決め制御動作に先立って、レーザ距離計23からの計測データを用いてエンコーダ21をプリセットする。
(もっと読む)
距離算出装置及び距離算出方法
【課題】本発明は、生産コストを低減させるとともに、台車の移動距離を高精度に算出することを目的とする。
【解決手段】
本発明は、台車100に備えられ、外部から駆動力が与えられることにより台車100を走行経路L上で移動させる駆動輪110と、駆動輪110とは別に台車100に備えられた補助輪120と、補助輪120の回転量に応じたパルスを出力するインクリメンタルエンコーダ140と、走行経路L側に備えられたマークMを検知するマーク検知部150と、マーク検知部150によりマークMが検知されたことに基づいて、マークMに対応する走行経路Lにおける位置を特定する位置特定部161と、インクリメンタルエンコーダ140から出力されたパルスに基づいてパルスの数を計数することにより、位置特定部161により特定された位置から台車の移動距離を積算する距離算出部162とを備えている。
(もっと読む)
位置決め制御装置
【課題】 位置制御時の速度超過やオーバーシュートを抑制しつつ位置決め時間を短縮でき、制御応答が低い場合においても安定した制御ができる位置決め制御装置を得る。
【解決手段】 サーボ制御に理想的なモデルトルク、モデル速度、モデル位置を出力するモデル演算部1と、モデル位置と実位置との位置偏差に対して位置制御ゲインを掛けて速度指令を演算する位置比例補償手段3aと、この速度指令およびモデル速度と実速度の偏差に対してフィードバックトルク指令を出力する速度比例積分補償手段5,6,7と、このフィードバックトルク指令にモデルトルクを加算した加算値を予め設定されたトルク制限値で制限してモータを駆動するトルク指令として出力するトルク制限手段9と、を備え、位置比例補償手段3aは、動作中にモデル速度の多項式に基づいて位置制御ゲインを連続的に変化させる。
(もっと読む)
1 - 7 / 7
[ Back to top ]