
Fターム[5H303MM03]の内容
位置、方向の制御 (6,897) | 制御部、演算部の出力信号の種類 (175) | 不連続信号であるもの (26) | 多段階信号であるもの (5)
Fターム[5H303MM03]に分類される特許
1 - 5 / 5
位置検出システム及びケーブルユニット
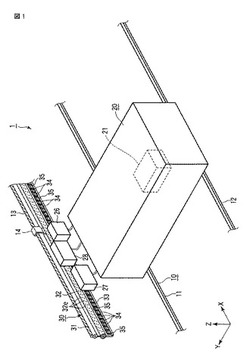
【課題】単純なシステムで位置制御を可能とし、設備費用を低減できる位置検出システム及びケーブルユニットを提供する。
【解決手段】位置検出システムは、所定の移動経路10に沿って移動可能な移動機20と、位置情報を記憶するとともに前記移動経路10に沿って並列配置された複数のICタグ34と、移動機20側に設けられ、対応する読取範囲A1に配された前記ICタグ34の位置情報を読み取る第1アンテナ26と、を備える。
(もっと読む)
ワーク移動装置及び円柱状ワークの調芯装置

【課題】本発明は、位置決めの正確性を低下させずに処理速度を迅速化可能なワーク位置決め装置及び円柱状ワークの調芯装置を提供することを目的としている。
【解決手段】本発明に係わるワーク移動装置は、ワークを一の方向に移動させるためのワーク移動装置であって、ワークを一面に載置する載置手段と、空気圧で押圧され一の方向に移動する推進部材を有するとともに推進部材の先端がワークを望む状態で配置された空気圧アクチュエータと、推進部材に取り付けられた圧電素子と、ワークに当接可能に圧電素子に取り付けられた衝撃体と、ワークの位置を検出する検出手段と、空気圧アクチュエータへ供給される空気の空気圧を調整する空気圧調整手段とを備え、空気圧調整手段は、位置検出手段の検出したワークの位置とワークが位置すべき所望の位置との偏差に基づいて前記一の方向に推進部材を押圧する場合の空気圧を調整することを特徴としている。
(もっと読む)
駆動装置
【課題】SMAアクチュエータに関する応答性を適切に向上できる駆動装置を提供する。
【解決手段】手振れ補正システム10Aでは、形状記憶合金(SMA)のワイヤとして構成される駆動部材14aが撮像ユニット(可動部)9Aの突起91に引っ掛けられている。そして、弾性変形部13aの回転中心から突起(力点)91までの距離Laよりも、弾性変形部13aの回転中心から撮像ユニット9Aの重心(作用点)Gvまでの距離Lbの方が大きくなっている。このままでは、撮像ユニット9Aの等価質量(見かけの質量)が(Lb/La)倍となって応答性の低下を招来するため、断面に関する長手方向の幅を短手方向の幅で除算した値が1.3以上となる楕円形断面の駆動部材14aを採用することとする。これにより、駆動部材14aの放熱性が高まるため、SMAアクチュエータに関する応答性を適切に向上できることとなる。
(もっと読む)
デジタル速度制御装置、デジタルモータ制御装置、紙搬送装置、デジタル速度制御方法、その方法をコンピュータに実行させるプログラム、コンピュータ読み取り可能な記録媒体、および画像形成装置
【課題】正確な制御が可能なデジタル速度制御装置を提供する。
【解決手段】デジタル速度制御装置10は、搬送ベルト301の変位量を標本化周期に対応する最小単位の変位量の整数倍によって取得する移動距離検出装置500と、標本化時刻に基づいて搬送ベルト301の目標速度を算出する目標速度算出部101と、搬送ベルト301の現在速度を変位量および標本化時刻の差分で算出する現在速度算出部102と、目標速度が所定値よりも小さいか否かを判定する目標速度判定部105と、目標速度は所定値よりも小さく、かつ、現在速度は標本化周期あたり最小単位の変位量であると算出された場合、現在速度を設定値に置き換える速度補正部106と、置き換えた設定値と目標速度との誤差を算出する速度誤差算出部103と、速度誤差に基づいて駆動モータ200を制御する調節計部104と、を備える。
(もっと読む)
XYステージ
【課題】 スライダ部の加速時、減速時、定速移動時の振動発生時にピッチング及びローリングを抑制する機能を具備したXYステージを実現する。
【解決手段】 スライダ部を2次元方向に位置制御するXYステージにおいて、スライダ部のピッチング角速度を検出するための信号を出力する第1のZ軸センサと、スライダ部のローリング角速度を検出するための信号を出力する第2のZ軸センサとを有することを特徴とするXYステージである。
(もっと読む)
1 - 5 / 5
[ Back to top ]