
Fターム[5H501LL09]の内容
電動機の制御一般 (20,975) | 検出変量、検出手段 (3,871) | 速度検出 (959) | デジタル値で検出するもの (383) | パルスエンコーダを用いるもの (343) | 磁気式のもの (38)
Fターム[5H501LL09]に分類される特許
1 - 20 / 38
モータ制御装置
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
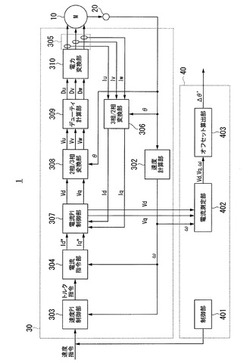
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータの速度制御を行う速度PI制御部303と、モータが一定速度で回転しているときの速度制御部の出力に基づく電圧指令値を測定する電圧測定部と、測定された電圧指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
モータ制御装置、モータ制御方法

【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供する。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、前記モータを一定速度で回転させ、一定電流量のd軸電流を流す速度指令値に基づいてモータの速度制御を行う速度PI制御部303と、モータが一定速度で回転し、一定電流量のd軸電流が流れているときの速度制御部の出力に基づく電流指令値を測定する電流測定部402と、測定された電流指令値に基づき、モータの回転位置に対する補正値を算出するオフセット算出部403と、を備える。
(もっと読む)
モータ制御装置およびトルク値取得方法
【課題】モータ制御装置において、必要メモリ容量の増大を抑制しつつ、より精度よくモータのトルク値を求められるようにする。
【解決手段】記憶部131は、トルク指令値を電流指令値に変換するための電流指令テーブルを記憶する。そして、トルク値取得部160は、当該電流指令テーブルを参照して、モータ電流値をトルク値に変換することで、モータのトルク値を取得する。トルク値取得部160は、モータ制御のために用意される電流指令テーブルを参照するので、トルク値取得のためのテーブルを別途設ける必要がない。従って、記憶部131のメモリ容量を増やす必要がない。また、トルク値取得部160は、モータMの特性を詳細に示す電流指令テーブルを参照してトルク値を求めるので、数式に基づいてトルク値を求める場合との比較において、より短い時間で、より高精度なトルク値を取得できる。
(もっと読む)
誤差周波数成分取得装置、回転角度取得装置、モータ制御装置および回転角度取得方法
【課題】レゾルバを用いてロータ回転角度を検出する装置において、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得られるようにする。
【解決手段】角度測定値取得部210が、モータ軸の回転角度測定値を取得し、誤差算出部220が、複数の回転角度測定値の各々に含まれる誤差を算出する。そして、周波数成分取得部230が、複数の誤差から、誤差の周波数成分の位相および振幅を求める。これによって、誤差周波数成分取得装置121は、回転角度測定値に含まれる誤差の周波数成分の位相および振幅を自動的に算出することができ、当該位相および振幅を用いて回転角度測定値に対する補正を行うことができる。従って、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得ることができる。
(もっと読む)
ショベル
【課題】電動発電機の異常をより柔軟に検出可能なショベルを提供すること。
【解決手段】本発明に係るハイブリッド式ショベルは、エンジン11により発電機として駆動される電動発電機12を備えるショベルであって、電動機として機能する電動発電機12の入力を表す入力物理量を取得する入力物理量取得部300と、入力物理量取得部300が取得する入力物理量に対応する、電動機として機能する電動発電機12の出力を表す出力物理量を取得する出力物理量取得部301と、出力物理量に対する入力物理量の割合に基づいて電動発電機12の異常を検出する電動発電機異常検出部302とを備える。
(もっと読む)
車両用モータ制御装置
【課題】車両の共振周波数を解消できる車両用モータ制御装置を提供する。
【解決手段】各種センサ7からの車両の状態量に応じて第1のトルク指令値Trefを生成する車両制御装置1と、走行用モータ3の電気角ωから検知できるトルクリプル成分の中で車両共振を発生させる周波数成分を車両共振成分抽出フィルタ24で抽出し、その周波数成分に対してフィードバック制御を行うための共振補償値である第2のトルク指令値Tcmpを生成する車両共振補償演算部23と、第1のトルク指令値Trefから第2のトルク指令値Tcmpを減算してトルク指令値Tref_cmpを生成する加算器20とを備え、当該トルク指令値により走行用モータ3を制御する。これにより、走行用モータ3のトルクリプルによる車両の共振が抑制できる。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置10では、トルク軸電圧が印加されているにも関わらず、トルク軸電流が第1閾値以下の状態において、相間電圧がゼロボルト近傍になっている組合せの相以外の相を異常相として検出する。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置では、q軸電圧が印加されているにも関わらず、q軸電流が第1閾値以下である基準電気角を算出し、前記基準電気角に基づいて異常相を判定する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】駆動回路を構成する各スイッチング素子に生じた短絡異常と区別して、精度良くセンサ異常の発生を検出することのできるモータ制御装置を提供すること。
【解決手段】異常検出部は、検出される山読み電流値Ix_hpの絶対値及び各谷読み電流値Ix_lpの絶対値の少なくとも何れかが、その電流検出の限界値に対応して設定された第1の閾値I1を超えるか否かを判定する。また、異常検出部は、その検出される相電流値Ixの絶対値が「0(ゼロ)」に対応して設定された第2の閾値I2よりも小さいか否かを判定する。そして、これら二つの判定条件を共に満たす相がある場合には、当該相にセンサ異常(張り付き異常)が発生したものと判定する。
(もっと読む)
電動機制御装置
【課題】電動機をより適正に制御する。
【解決手段】モータ10の回転数Nmが大きいほど大きな変化中回転変化量Δθofsを用いて変換器34からの理想角θidを補正して得られる補正後理想角θidmoをインバータ12のスイッチング素子のスイッチング制御に用いる。これにより、電子制御ユニット40に入力された理想角θidをそのタイミングでレゾルバ装置22から出力された検出角θdetに対応する理想角に換算することができ、モータ10をより適正に駆動制御することができる。
(もっと読む)
インバータ制御装置および電力変換システム
【課題】所定期間内に加速や減速等のような回転数の変動が生じる場合であっても、従来より正確に角度補正ができるようにする。
【解決手段】インバータ制御装置60は、レゾルバ41(第1角度検出器)によって出力される回転電機40の回転角度に関する信号情報に基づいて理想角度と回転角度との誤差を補正する誤差補正手段67と、レゾルバ41によって出力される信号情報に基づいて基準角度θsを検出する基準角度検出手段66と、基準角度検出手段66によって検出される基準角度θsに基づいて検出角度θdとの誤差を補正する基準となる基準周期Tsを決定する基準周期決定手段68とを有する。誤差補正手段67は、基準周期決定手段68によって決定される基準周期Tsに基づいて理想角度を推定し、推定した理想角度とレゾルバ41によって出力される信号情報に基づいて検出される検出角度θdとの誤差を補正する。
(もっと読む)
回転子の位置検出方法、電動機の制御方法、電動機制御装置及びプログラム
【課題】ノイズ等の外乱による誤動作や断線状態を検出できないR/Dコンバータを用いても回転子の回転位置に基づいて電動機の制御を滞りなく行う。
【解決手段】共通のコネクタC1,C2を介してそれぞれ第1及び第2のケーブル6,8で回転位置検出器2及びサーミスタ4が接続される処理部20において、回転位置検出器2の出力信号から回転位置に関する情報及び品質に関する情報を取得する第1の工程と、品質に関する情報が正常であるか否かを判断する第2の工程と、第2の工程で肯定的結果が得られた場合に当該回転位置に関する情報に基づいて回転位置を演算する第3の工程と、第2の工程で否定的結果が得られた場合に、当該品質に関する情報が異常となる頻度が予め定められた規定値以上か否かを判断する第4の工程と、第4の工程で否定的結果が得られた場合、第3の工程で演算された回転位置に基づいて、回転位置を補間して求める第5の工程とを実行する。
(もっと読む)
ハイブリッド式建設機械
【課題】電動モータ、インバータ、蓄電装置等の電動システムが故障して油圧モータ単独で旋回体を駆動する事態が発生した場合でも、電動システムから発生する不測の事故を防止できるハイブリッド式建設機械を提供する。
【解決手段】ハイブリッド式建設機械において、電動モータ25と油圧モータ27の両方を駆動して、旋回体20の駆動を行う油圧電動複合旋回モードと、油圧モータ27のみを駆動して、旋回体20の駆動を行う油圧単独旋回モードとの切替えを行う制御装置80を備え、制御装置80は、電動システムに故障又は異常が発生した場合に油圧単独旋回モードに切り替える制御切替え手段85と、油圧単独旋回モードにおいて、各温度センサからの検出値が予め設定している制限規定値以内になるように油圧モータ27の回転数を制限するために原動機22の回転数を制限制御する監視制御手段84とを備えた。
(もっと読む)
回転機の制御装置および回転機の制御システム
【課題】回転数および電圧値が変化しても、従来よりもトルク応答性を向上させる。
【解決手段】回転機(電動機50等)の制御装置20において、電動機50の回転数Nおよび電力変換回路40に入力する電圧値Vdcに基づいて制御ゲインを設定するゲイン設定器23と、少なくとも積分要素を含み、トルク指令T*とトルクとの偏差とゲイン設定器23で設定される制御ゲインとに基づいてフィードバック制御を行い電力変換回路40が出力する電圧の位相を示す電圧位相指令θ*を出力するフィードバック制御器24と、フィードバック制御器24から出力される電圧位相指令θ*に基づいてスイッチング素子の制御を行う制御信号Scを生成して電力変換回路40に出力するスイッチング信号生成器25とを有する構成とした。回転数Nや電圧値Vdcが変化しても適切な制御ゲインが設定され、トルク応答性が向上する。
(もっと読む)
モータ駆動制御装置
【課題】検出回転数からのモータの回転数の推定性能をより向上する。
【解決手段】検出回転数算出部9により駆動モータ2の回転数を算出して検出し、検出回転数算出部9の検出回転数に基づき、移動平均回転数算出部10は細かな変動の影響を受けない移動平均回転数を算出する。さらに、変化量算出部11により移動平均回転数の時間的な変化量を算出し、回転数推定部12により、移動平均回転数に、前記変化量と移動平均回転数の算出に要する時間相当の所定数との積の定数倍の補正回転数を加算し、前記変化量の正負に応じて移動平均回転数を前記補正回転数だけ増減補正する。そして、駆動モータ2の実回転数が急変しても、その変化率(時間的な変化量)は一定であり、実回転数と移動平均回転数とは略一定の差で遷移(変化)し、実回転数に対して移動平均回転数が移動平均の算出時間相等の時間だけ遅れて実回転数と同じように変化する。
(もっと読む)
モータ角度検出装置
【課題】モータの回転子の回転角度を回転角度検出センサで検出する際に、その検出角度の誤差を精度良く補正することができ、これによって正確な回転角度を求めること。
【解決手段】三相交流のモータ3の回転角度を検出するレゾルバ3aと、レゾルバ3aでの検出角度を補正するモータ回転角度補正手段12cとを有する。モータ回転角度補正手段12cが、レゾルバ3aでの角度検出時の時間(t1+Δt1)の取得時に当該時間時の角度(θ1+Δθ1)も取得し、この取得された角度(θ1+Δθ1)の中から当該取得された時間(t1+Δt1)に含まれる遅延時間Δt1に応じて増加した増加角度Δθ1を求め、この増加角度Δθ1に、レゾルバ3aの1周期分の時間T12を角度θ12で割った時間変化率C1を乗算して遅延時間Δt1を求め、この遅延時間Δt1を上記取得された時間(t1+Δt1)から減算して補正時間t1aを求め、この補正時間t1aで検出角度(θ1+Δθ1)を補正するようにした。
(もっと読む)
回転駆動伝達装置及びその回転駆動伝達装置を備えた画像形成装置
【課題】モータから感光体へ確実に駆動力を伝達するとともに、感光体をモータから容易に離隔させる回転駆動伝達装置において、コストアップを抑制して良好な回転制御を実現する。
【解決手段】回転駆動伝達装置は、駆動軸110の端面に固設された駆動軸側磁性集合板100Aと、磁性集合板100Aに対向するように感光体11の端面に固設された感光体側磁性集合板100Bと、感光体側磁性集合板100Bにより発生する磁気を検出する感光体側磁気センサ150と、感光体側磁気センサ150により検出された磁気に基づいて感光体側の回転速度を算出して、感光体側の回転速度が目標速度になるようにモータを制御する制御部とを含む。
(もっと読む)
モータ駆動制御装置及び電動パワーステアリング装置
【課題】2乗和異常の誤検出を防止して異常検出能力を向上させることが可能なモータ駆動制御装置及び電動パワーステアリング装置の提供を目的とする。
【解決手段】本発明のモータ駆動制御装置40は、モータ駆動回路43に備えたスイッチ素子のオンオフタイミング以外のタイミング、換言すれば、レゾルバ25の出力信号(sin相信号、cos相信号)にスイッチングノイズが重畳する可能性が低いタイミングで、2乗和異常の有無を判定する際には、2乗和変動許容範囲の上限値として通常上限値H1を使用し、スイッチ素子のオンオフタイミング、換言すれば、レゾルバ25の出力信号にスイッチングノイズが重畳する可能性が高いタイミングで、2乗和異常の有無を判定する際には、2乗和変動許容範囲の上限値として通常上限値H1にスイッチングノイズ分を上乗せした特別上限値H2を使用する。
(もっと読む)
サーボシステム
【課題】1種類の位置検出器で位置決め精度と応答性を向上させることができるサーボシステムを提供する。
【解決手段】1相励磁2相出力タイプのレゾルバ4を連結したサーボモータ3と、サーボモータ3の駆動を制御するマイコン6と、レゾルバ4のアナログ信号をデジタル信号に変換するトラッキング方式のRDコンバータ5と、サーボモータ3に電流を供給するモータ駆動回路7を有するサーボアンプ2と、サーボアンプ2に位置指令を送信する上位コントローラ1を備え、マイコン6は、制御における所定値に基いてRDコンバータ5の分解能を変更し、位置制御を行う。
(もっと読む)
1 - 20 / 38
[ Back to top ]