
Fターム[5H505GG06]の内容
交流電動機の制御一般 (51,584) | 制御系 (3,480) | 位相制御するもの(PLL制御) (77)
Fターム[5H505GG06]に分類される特許
1 - 20 / 77
モータ制御装置
モータ制御装置
【課題】停止位置によらず、かつ負荷特性が変化した場合にも安定にモータを駆動するモータ制御装置、およびそれを用いた駆動装置を提供する。
【解決手段】回転角度位置に関する情報を用いない同期運転モードと回転角度位置に関する情報を用いて駆動する位置センサレス運転モードとを備え、前記運転モードを駆動中に切り替えるモータ制御装置において、機械角1周期もしくは機械角1周期の整数倍で変動する周期トルク成分を推定する手段を備え、周期トルクの傾きがゼロ近傍または負になる期間に運転モードを切り替えることを特徴とするモータ制御装置。
(もっと読む)
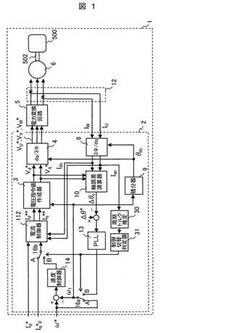
交流電動機の制御装置

【課題】 運転状態によって電動機特性が大きく変動してもロバストで高効率な位置センサレス駆動を可能とする交流電動機の制御装置を提供する。
【解決手段】 トルク指令T*を制御位相θ∧を用いて分解し、交流電動機の機械出力に寄与する成分をδ軸電流指令、寄与しない成分をγ軸電流指令として出力する電流分配器3Aと、前記δ軸、γ軸電流指令とδ軸、γ軸電流検出のそれぞれが一致するように制御する電流制御器5と、前記電流制御器の出力と前記交流電動機のインダクタンスでの電圧降下量との加算量のγ軸成分がゼロとなる位相を算出し、前記制御位相θ∧として出力する位相推定器8と、を備える。
(もっと読む)
電気機械装置
【課題】電気機械装置の効率的な制御を行う。
【解決手段】電機機械装置であって、電磁コイルと、前記電磁コイルにPWM駆動信号を供給するためのPWM駆動回路と、前記PWM駆動回路を制御する制御部と、を備え、前記制御部は、前記電磁コイルに前記PWM駆動信号を供給する区間としての励磁区間を設定する第1の制御と、前記PWM駆動信号のデューティ比を変更する第2の制御と、を実行し、前記制御部は、前記第1の制御において、前記励磁区間の中心の位相を、前記電磁コイルに生じる逆起電力の最大値が生じる位相の値よりも早める進角制御を行うとともに、前記第2の制御において、正弦波を模擬するPWM駆動信号を生成する際のゲインを100%としたときに、100%を越えるゲインを実現するように前記デューティ比を増大させる、電機機械装置。
(もっと読む)
モータ制御装置及び電気機器
【課題】騒音発生を抑制しつつモータの高効率運転を実現する。
【解決手段】モータ印加電圧に対する電圧指令振幅V*とモータ1の回転速度ωとに基づき位相進め角δを算出し、モータ印加電圧の位相(モータ1の出力電圧ベクトルの位相)を位相進め角δに合わせる電圧位相制御モードと、インバータ2及び直流電源4間の電流センサ5の出力信号からモータ1の三相電流を検出し、検出電流値に基づきモータ1のベクトル制御を行うベクトル制御モードと、を選択的に機能させる。モータ1の回転速度ω(又はモータ印加電圧の大きさ)が比較的小さいときには電圧位相制御モードにてモータ制御を成し、モータ1の回転速度ω(又はモータ印加電圧の大きさ)が比較的大きいときにはベクトル制御モードにてモータ制御を成す。
(もっと読む)
巻線形誘導機の始動制御方法及び始動制御装置
【課題】巻線形誘導機の始動トルクを改善し、装置全体の小型軽量化、低コスト化を可能にした始動制御方法及び始動制御装置を提供する。
【解決手段】第1の電源系統21、低圧の第2の電源系統22に接続された第1,第2の開閉手段31,32をオフして固定子巻線11を開放した状態で電力変換器34により回転子巻線12に電圧を印加し、固定子巻線11の誘起電圧と電源系統22の電圧とを同期させてから開閉手段32をオンして電源系統22を固定子巻線11に接続する第1の同期投入モードと、電力変換器により誘導機10を所定速度まで加速し、その後、開閉手段32をオフして固定子巻線11を開放する第1の加速モードと、固定子巻線11の誘起電圧と電源系統21の電圧とを同期させてから開閉手段31をオンして電源系統21を固定子巻線11に接続する第2の同期投入モードと、を順次実行して誘導機10を始動する。
(もっと読む)
電力変換装置
【課題】回転位置を検出するセンサを回転電動機の軸に取り付けることなく同期整流を実現するとともに、誘起相電圧の周期と各相の検出順序が正しいかどうかのチェックにかかる負荷を低減させること。
【解決手段】同期検出PLL部13は、ダイオードオン統合信号S12に基づいて同期制御されたオン側同期信号S13を生成するとともに、ダイオードオフ統合信号S12´に基づいて同期制御されたオフ側同期信号S13´を生成し、ステータゲート指令生成PWM部15は、オン側同期信号S13およびオフ側同期信号S13´に基づいて、スイッチング素子のスイッチング制御を行わせるゲート指令信号S16を生成する。
(もっと読む)
電動機制御装置
【課題】インバータが電圧位相の制御により駆動されている場合であっても、インバータなどを含む電動機駆動装置において損失を生じさせてバッテリへの回生電力の余剰電力を消費させる。
【解決手段】電動機制御装置は、変調率Mが所定の変調率しきい値より小さいとき、電流位相制御モードを選択し、変調率Mが変調率しきい値以上のとき、電圧位相制御モードを選択するモード制御部15と、電圧位相制御モードの実行中且つバッテリを充電する充電電力に余剰電力が生じていることを条件として、変調率Mを変調率しきい値よりも低下させるためにコンバータにシステム電圧Vdcを上昇させることを判定する昇圧判定部13と、電流位相制御モードにおいて、交流電動機のトルクを維持した状態で、界磁電流を余剰電力に応じて増大させる高損失制御部12とを備える。
(もっと読む)
位相ロックループベースのねじりモード減衰システムおよび方法
電動機の磁極位置推定装置
【課題】装置構成の複雑化および演算負荷の増大を抑制し、磁極位置の算出結果に変動が生じることを防止する。
【解決手段】電動機の磁極位置推定装置は、モータの所定モデルの電圧方程式に応じたモデル電流を算出し、モデル電流と実電流との電流差を算出するモータモデル電流演算部61と、電流差に基づいて、モータの実際の磁極位置と推定又は指定による磁極位置との磁極位置差を、モータの回転速度が所定値未満であるか否かに応じて、互いに異なる演算により算出する高速域磁極位置誤差演算部65及び低速域磁極位置誤差演算部66と、高速域磁極位置誤差演算部65又は低速域磁極位置誤差演算部66により算出された磁極位置差に基づいて、モータの磁極位置を演算する回転速度−磁極位置演算部49とを備える。
(もっと読む)
電動機の磁極位置推定装置
【課題】電動機の電流制御の精度および安定性を向上させ、磁極位置の推定精度の低下を防止する。
【解決手段】電動機の磁極位置推定装置は、モータへの通電に対するγ軸電圧指令値Vγ及びδ軸電圧指令値Vδが、基準電圧Vsγ,Vsδに対する正側パルス電圧Vpγ,Vpδであるときに磁極位置誤差演算部63により算出された位相差Δθeと、γ軸電圧指令値Vγ及びδ軸電圧指令値Vδが、基準電圧Vsγ,Vsδに対する負側パルス電圧Vnγ,Vnδであるときに磁極位置誤差演算部63により算出された位相差Δθeとの平均値を算出する磁極位置誤差平均演算部64と、この平均値に基づきモータの磁極位置を演算する回転速度−磁極位置演算部49とを備える。
(もっと読む)
モータ駆動回路
【課題】低コストで、連続的に誘起電圧を検出し、それをもとにモータの脱調を回避する。
【解決手段】コイル電流検出部30は、コイルに流れる電流成分を検出する。スケーリング部38は、駆動信号をスケーリングする。誘起電圧成分抽出部42は、コイル電流検出部30により検出されたコイル電流成分から、スケーリング部38によりスケーリングされた駆動信号を除去して、誘起電圧成分を抽出する。位相差検出部74は、駆動信号の位相と、誘起電圧成分の位相との位相差を検出する。脱調予測判定部80は、位相差検出部74により検出された位相差の微分値と、脱調予測用の検出閾値とを比較し、脱調発生を予測する。
(もっと読む)
モータ駆動回路
【課題】低コストで、連続的に誘起電圧を検出し、それをもとにモータを高効率駆動する。
【解決手段】コイル電流検出部30は、コイルに流れる電流成分を検出する。スケーリング部38は、駆動信号をスケーリングする。誘起電圧成分抽出部42は、コイル電流検出部により検出されたコイル電流成分から、前記スケーリング部によりスケーリングされた駆動信号を除去して、誘起電圧成分を抽出する。位相差検出部74は、駆動信号の位相と、誘起電圧成分の位相との位相差を検出する。信号調整部14は、位相差検出部74により検出された位相差を目標位相差に近づけるよう駆動信号を調整する。
(もっと読む)
モータの制御装置
【課題】低気圧の環境下でも駆動トルクが低下しないようにモータを駆動させることができ、これによってドライバーの車両加速上昇等の要求に答えること。
【解決手段】ECU40が、所定の常気圧の場合に、モータジェネレータ(モータ)MGの巻線間電圧差の最大値であるモータ内最大電圧差ΔV1が、巻線間で部分的に生じる放電の開始電圧である部分放電開始電圧DNよりも低く且つモータMGで所定の必要トルクが得られる電圧値が印加されるように通常設定されていることに基づき、インバータ30の電力変換動作を制御する。ECU40は、常気圧よりも低い低気圧下で部分放電開始電圧DLが通常設定時のモータ内最大電圧差ΔV1よりも下がった際に、モータMGへの供給電流が、少なくともモータジェネレータMGが必要トルクを発生するに必要な実効値と位相になるようにインバータ30の電力変換動作を制御する。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】電動モータMを位置センサレス制御する場合において、低い制御周波数であっても、コストアップを招くことなく、制御応答性を向上させる。
【解決手段】電動モータMに流れる電流値に基づいてロータの位置誤差を推定し、推定された前記位置誤差d_BEMFからロータの回転速度を推定し、推定された前記回転速度ω^と予め設定した設定速度との偏差に少なくとも基づいて前記電動モータMに付与すべき制御電圧又は制御電流を設定する。その際に、電動モータMの慣性モーメントを測定しておき、前記回転速度ω^の推定パラメータとして、前記位置誤差d_BEMFに加えて前記慣性モーメントを用いるようにした。
(もっと読む)
インバータ装置
【課題】同期モータの特性に関係なく、簡単な制御で安定した運転を可能にする、安価かつ高性能なインバータ装置を提供する。
【解決手段】位相差検出部8は、インバータ回路2の交流電圧と交流電流との位相差を検出し、PI演算部11は、この位相差と目標とする位相差との誤差に応じたデューティ基準値を算出する。位相差振動検出部17は、位相差の振動成分を検出し、回転数補正量演算部18は、この振動成分に基づいて回転数補正量を算出する。回転数補正量の正負は位相差とデューティ基準値との関係に応じて決められる。PWM作成部15は、補正された回転数指令値に応じた正弦波データとデューティ基準値とに基づいて、PWM信号を作成して、インバータ回路2に出力する。
(もっと読む)
電動機駆動装置及び電動機駆動装置の制御方法ならびに電動装置
【課題】部品点数を減らしつつ、エネルギー変換効率を向上することが可能な電動機駆動装置を提供する。
【解決手段】電動機駆動装置(1、21〜23)は、交流電動機10に印加される電圧を調節することにより交流電動機10を駆動するインバータ3と、交流電動機10の複数のコイルが結線された中性点と、インバータ3の正極側母線または負極側母線との間に直流電圧を印加する直流電源2から供給され、かつインバータ3を経由する電流により充電されるコンデンサ4と、交流電動機10が指定された回転数で回転するように、インバータ3を制御する制御回路7とを有する。そして制御回路7は、交流電動機10に生じる誘起電圧と、直流電源2と、コンデンサ4の電圧との条件により弱め界磁制御と昇圧制御を使い分けてインバータ3を制御する。
(もっと読む)
車両の作動音制御装置
【課題】加速走行時の音質を向上する車両の作動音制御装置を提供する。
【解決手段】モータ5の回転角度をレゾルバによって検出し、検出した回転角度に基づいて所定時間前の回転角を設定し、時間遅れを持った音と原音とを乗算した駆動電流指示値に基づいてインバータ4への電圧指令値を算出する。そして、インバータ4を電圧指令値に基づいて制御することで、モータ5に供給される駆動電流を制御する。
(もっと読む)
モータの制御装置
【課題】コンバータによってインバータの直流側電圧を可変制御可能に構成されたモータの制御装置において、トルク制御性および効率をバランスさせるように矩形波電圧制御におけるコンバータの動作状態を適切に制御する。
【解決手段】矩形波電圧制御によって要求される電圧位相φvが、昇圧判定位相よりも大きくなるとコンバータに対して昇圧要求が発せられる。モータの必要トルクが大きいときには、インバータの直流側電圧VHが相対的に高く設定されることから、昇圧レートも高く設定される。昇圧レートが大きいときには昇圧判定位相を低く(φ0)設定するので、直流側電圧VHを早期に昇圧することにより高トルクの確保が容易となることによって、トルク制御性が向上される。一方、昇圧レートが小さいときには、昇圧判定位相が高く(φ2)されるので、コンバータをスイッチング損失が低い非昇圧モードで長期間動作させることができる。
(もっと読む)
交流電動機の制御システム
【課題】矩形波電圧振幅の変化に対応したトルク変化量をフィードバック制御を待つことなく補償することによって制御応答性を向上する。
【解決手段】モータ運転状態および矩形波電圧の電圧位相θvに対する出力トルクの特性を示すトルク演算式に従って、FF係数算出部452は、インバータの直流側電圧VHの変化に対して、出力トルクを一定に保つための位相変化量の比(dθ/dV)を算出する。積分項補正部450は、直流側電圧VHの変化を示すΔVと(dθ/dV)との積に従って、電圧位相シフト量θsfを算出する。そして、トルク偏差に応じて電圧位相を変化させるフィードバック制御による積分項は、電圧位相シフト量θsfに従って変化される。
(もっと読む)
1 - 20 / 77
[ Back to top ]