
Fターム[5H505GG10]の内容
交流電動機の制御一般 (51,584) | 制御系 (3,480) | その他 (55)
Fターム[5H505GG10]に分類される特許
1 - 20 / 55
モータを制御するための方法およびシステム
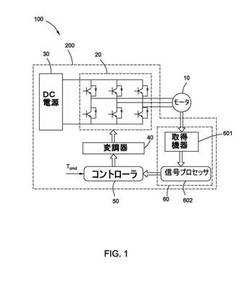
【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
モータ制御装置

【課題】スイッチング損失およびサージ電圧を抑制しつつ、小型化、および製造コストの低減化を達成することのできるモータ制御装置を提供する。
【解決手段】第1のFET51と第2のFET52との接続点14が、第1のリレー11を介して電動モータ1のU相界磁巻線3Uに接続されている。接続点14と第2のFET52との間に第1のインダクタ21が接続されている。制御部5は、第1のリレー11に回生電流i1が流れているときに、第1のリレー11をターンオフする。これにより、第1のインダクタ21に、回生電流i1の変化を妨げる方向に誘起電圧Vbが生じる。この結果、第1のFET51のソース電位が高くなるので、第1のFET51に端子間電圧が低減される。第1のFET51に端子間電圧が低減した状態で、第1のFET51がターンオンされる。
(もっと読む)
モータ制御装置
【課題】試験体を回転させるモータの回転数の制御の精度を向上させることが可能なモータ制御装置を提供する。
【解決手段】レゾルバ34及びエンコーダ35は、モータ33の回転数を検出する。トルクメータ36は、モータ33のトルクを検出する。フィードバック制御部23は、目標の回転数と目標のトルクとを示すパラメータマップに従って、目標の回転数でモータ33が回転するように、又は、目標のトルクをモータ33が出力するように、レゾルバ34によって検出された回転数、及びトルクメータ36によって検出されたトルクに基づいて、モータ33の動作をフィードバック制御し、トルクの変動幅が閾値以上となる場合、レゾルバ34によって検出された回転数とエンコーダ35によって検出された回転数とから求められる回転数に基づいて、モータ33の動作をフィードバック制御する。
(もっと読む)
交流回転機の制御装置
【課題】速度制御系の機械的応答で制約されていたトルクの応答性を改善できる交流回転機の制御装置を提供する。
【解決手段】交流回転機2へ交流電圧を出力する電力変換手段3と、交流回転機2に流れる電流を検出する電流検出手段4と、検出電流を回転二軸座標上の電流へ変換する電流演算手段5と、回転二軸座標上の電流に基づいて交流回転機2が出力する出力トルクを演算するトルク演算手段8と、トルク指令と出力トルクとの偏差に基づいて周波数指令を演算する周波数指令演算手段9と、周波数指令を補正する周波数補償量をトルク指令に基づいて演算する補償器10と、補正後の周波数指令に基づいて回転二軸座標上に設定した制御座標軸の位相を演算する位相演算手段6と、補正後の周波数指令と制御座標軸の位相とに基づいて電力変換手段に出力する電圧指令を演算する電圧指令演算手段7を備える。
(もっと読む)
回転機の制御装置
【課題】検出される回転角度θを補正する補正値Δθの正常値を利用して制御を行うことができなくなることで、トルクフィードバック制御部20による制御が破綻する懸念があること。
【解決手段】推定トルクTeを要求トルクTrにフィードバック制御するための操作量としての位相δと、電気角速度ωおよび要求トルクTrに応じて開ループ制御によって定まるノルムVnと、回転角度θの検出値に基づき、操作信号生成部25では、インバータの操作信号を生成する。ここで、回転角度θとしては、上記補正値Δθによって補正されたものが用いられる。ただし、補正値Δθを利用不可能となる場合、電流フィードバック制御部30による制御に切り替える。
(もっと読む)
制御定数の決定方法及び電動機制御装置
【課題】矩形波制御のトルクリップルへの対応を考慮するとともに、電動機のトルクフィードバック制御系の安定性及び応答性を考慮した、制御定数の決定方法を提供する。
【解決手段】トルクフィードバック制御器は、トルク指令値に対する、ローパスフィルタの処理を行った電動機の出力トルクのトルク偏差を算出し、比例積分制御を行って電圧位相を算出する制御器であり、電圧位相の変化に対する出力トルクの傾きであるトルク位相傾きを電動機の伝達関数と決定するステップと、一巡伝達関数のゲイン余裕及び位相余裕が確保されるような積分ゲインの第一の決定条件を導出するステップと、閉ループ伝達関数の応答性が、所定の応答性以上に速くなるような積分ゲインの第二の決定条件を導出するステップと、積分ゲインを、第一の決定条件及び第二の決定条件の双方を満たすように決定するステップと、を備える。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置およびそれを備えた車両用操舵装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTを指示操舵トルクT*に近づけるように、PI制御部23によって、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。ゲイン変更部40は、PI制御部23の比例ゲインKPを、γ軸指示電流値Iγ*が大きいほど小さくなる特性に従って可変設定する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】加算角補正部25は、モータ推定温度が第1の所定温度以上となると、インターバル時間毎に、加算角リミッタ24から出力される加算角αの絶対値を一時的に低減させる。また、加算角補正部25は、インターバル時間を、モータ推定温度が高いほど短くする。そして、インターバル時間が所定のしきい値以下になると、すなわち、モータ推定温度が第1の所定温度より高い第2の所定温度以上となると、加算角補正部25は、指示電流値変更部31に電流停止指令を通知する。これにより、γ軸指示電流値Iγ*が零にされ、操舵モードがマニュアルステアモードとなる。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサの故障時に、回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部40は、レゾルバ8の出力信号の異常を検出すると、第2モードから、第1モードに、モータ制御モードを切り換える。制御モードが第1モードに切り換えられると、レゾルバ8の故障直前のq軸指示電流Iq*が負の値であるか否かが判別される。レゾルバ故障前のq軸指示電流Iq*が零または正の値である場合には、バッファ部28内に保存されているレゾルバ故障直前のロータ回転角θEが、制御角θCの前回値θC(n-1)の切換初期値として設定される。一方、レゾルバ故障前のq軸指示電流Iq*が負の値である場合には、バッファ部28内に保存されているレゾルバ故障直前のロータ回転角θEを、180°ずらした値(θE+π)が、制御角θCの前回値θC(n-1)の切換初期値として設定される。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】誘起電圧二乗和演算部37は、誘起電圧推定部28によって求められる推定誘起電圧の二乗和を求める。指示電流値生成部31は、検出操舵トルクTに基づいてγ軸指示電流値Iγ*を求めるとともに、誘起電圧二乗和Σに基づいてγ軸指示電流値Iγ*を求め、両者のうちの小さい方を、最終的なγ軸指示電流値Iγ*として設定する。誘起電圧二乗和Σが所定値D1以下のときには、γ軸指示電流値Iγ*は、小さな値ILに設定される。一方、誘起電圧二乗和Σが所定値D1より大きな所定値D2以上のときには、ILより大きな値IUに設定される。そして、誘起電圧二乗和Σが所定値D1から所定値D2までの範囲では、γ軸指示電流値Iγ*は、所定値ILから所定値IUまで滑らかに変化する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】トルクセンサ1によって検出され、操舵トルクリミッタ20によって制限処理を受けた検出操舵トルクTLを補正するための検出操舵トルク補正部40が備えられている。検出操舵トルク補正部40は、検出操舵トルクTLの絶対値|TL|が所定値a以下であるとき(|TL|≦a)には、検出操舵トルクTLを0に補正する。そして、検出操舵トルク補正部40は、検出操舵トルクTLの絶対値|TL|が所定値aより大きいとき(|TL|>a)には、検出操舵トルクTLをそのまま出力する。PI制御部23は、検出操舵トルク補正部40によって補正された検出操舵トルクTと指示操舵トルクT*との偏差に基づいて、加算角αを演算する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】回転角推定部29によって演算されるロータ50の推定回転角θEと、舵角センサ4によって検出されるステアリングホイール10の検出操舵角θSとに基づいて推定操舵トルクTEを演算する操舵トルク推定部64が備えられている。センサ故障検出部61によってトルクセンサ1の故障が検出されていない場合には、指示操舵トルク設定部21によって設定される指示操舵トルクT*と、トルクセンサ1から出力され、操舵トルクリミッタ20による制限処理を受けた検出操舵トルクTSとの偏差に応じて加算角αが演算される。一方、トルクセンサ1の故障が検出されている場合には、指示操舵トルクT*と、操舵トルク推定部64によって演算される推定操舵トルクTEとの偏差に応じて加算角αが演算される。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。速度推定オブザーバ43は、演算周期毎にロータ角速度ωn(演算周期当たりのロータ角変位に相当する)を求める。ロータ角速度補正部42は、指示電流値Iγδ*が急変した場合には、所要期間、指示電流値の急変直前に速度推定用オブザーバ43によって演算されていたロータ角速度と、指示電流値の急変後に速度推定用オブザーバ43によって演算されるロータ角速度とに基づいて、最終的なロータ角速度ωFを演算する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】モータ制御停止・再開タイミング検出部41は、モータ制御を停止させるべきタイミングと、モータ制御停止後においてモータ制御を再開させるべきタイミングとを検出する。モータ制御停止処理部43は、モータ制御停止・再開タイミング検出部41によってモータ制御停止タイミングが検出されたときに、制限値ωmaxを0まで漸減させた後に、指示電流値Iγ*を所定値以下となるまで漸減させる。モータ制御再開処理部44は、モータ制御停止・再開タイミング検出部41によってモータ制御再開タイミングが検出されたときに、制限値ωmaxを0に固定した状態で、指示電流値Iγ*を所定値以上となるまで漸増させた後に、制限値ωmaxを所定値以上となるまで漸増させる。
(もっと読む)
電圧形インバータの制御装置
【課題】電動機のPWM領域でスイッチング周波数制御の応答が遅くともスイッチング周波数をほぼ一定に保つことを目的とする。
【解決手段】
電流追従型PWM制御回路を用いた電圧形インバータの制御装置において、インバータのスイッチング周波数を検出するスイッチング周波数検出回路と、前記スイッチング周波数検出がスイッチング周波数指令値に従うようヒステリシスの大きさを制御するフィードバック制御回路と、電動機の回転数と電流基準とに基づき、所望スイッチング周波数を得るヒステリシスとなるように、ヒステリシスの大きさを制御するフィードフォワード制御回路とを有し、前記フィードバック制御回路と前記フィードフォワード制御回路に基づき、前記電流追従型PWM制御回路のスイッチング周波数を支配するヒステリシスを算出することを特徴とする電圧形インバータの制御装置。
(もっと読む)
電動機のトルク脈動抑制システム
【課題】電動機のトルク脈動を確実に抑制するための補償電流を自動学習によって取得でき、人手による補償電流テーブルの生成作業も大幅に軽減できる。
【解決手段】コントローラ5は、トルク脈動抑制手段とトルク脈動補償電流学習手段とを搭載し、電動機1のトルク脈動周波数成分を軸トルク検出値から抽出してトルク脈動を抑制するための補償電流を学習で求め、この補償電流をインバータ7の電流制御指令に重畳させて周波数成分毎のトルク脈動を抑制する。
このトルク脈動抑制のための補償電流の学習に、複数の異なる動作点で自動的に繰り返し実行し、この学習データを補償電流テーブルとして生成する補償電流テーブル生成手段を備える。
(もっと読む)
電気機械を非制限電流波形で励起させるシステム及び方法
【課題】瞬間非正弦波電流波形で電気機械を励起するシステム及び方法を提供する。
【解決手段】システムは、電気機械26内の電流の流れと端子電圧とを制御するインバータ24と、インバータ24に初期正弦波電流需要を入力し、それによってインバータ24に初期正弦波入力電流を出力させるようにプログラムされたコントローラ28とを含む。コントローラ28は更に、初期正弦波電流需要によって生成された電気機械26内の空隙磁界でフィードバックを受け、空隙磁界の瞬間基本成分と瞬間調波成分とを判定し、空隙磁界の前記瞬間基本成分に修正を加えて最適な基本成分を生成し、最適な基本成分に基づいて非正弦波電流需要を生成し、非正弦波電流需要をインバータ24に入力することによってインバータ24に非正弦波電流を出力させるようにプログラムされている。
(もっと読む)
電動機のトルク脈動抑制システム
【課題】電動機のトルク脈動を抑制するための補償電流の学習を簡易にし、この補償電流を基にしたトルク脈動抑制システムの構成を簡単化できる。
【解決手段】電動機の制御装置とは別装置にしたコントローラ5は、補償電流の学習にはトルク脈動抑制手段5Aと補償電流学習手段5Bによって、軸トルク検出値からトルク脈動周波数成分を抽出し、これを基にトルク脈動補償電流を学習してテーブル化する。
トルク脈動抑制時は、補償電流テーブルをインバータ7に実装し、コントローラ5や軸トルク検出器4をシステムから切り離してトルク脈動補償制御を行う。
(もっと読む)
交流電動機の制御装置
【課題】交流電動機に印加される矩形波電圧の電圧位相をトルク指令値に基づいて変化させるフィードフォワード制御について、演算処理の複雑化を招くことなく広いトルク制御範囲にわたって共通に適用できるような制御構成を提供する。
【解決手段】非線形特性を有するトルク特性線500において現在の動作点での接線の傾きに従った線形近似演算によって、トルク指令値に対するトルク補償量を解消するための位相変化量を求める。反転領域600,610では、接線の傾きが他の領域とは異なるため、位相変化量が本来とは反対の極性で算出される虞がある。このため、動作点を更新しつつ線形近似演算を複数回繰返す演算処理において、線形近似演算によって求められた接線の傾きが負であるときには、当該傾きを正の所定値に修正した上で、繰返演算を実行する。
(もっと読む)
交流電動機のセンサレス制御装置
【課題】 高速域で閉ループ速度制御及びq軸電流制御により高精度な速度及びトルク制御を行い、低速域でq軸電流ループの動作停止によりダンピングを改善し且つ一定速時や停止時の振動を抑圧することができる交流電動機のセンサレス制御装置を提供する。
【解決手段】 推定速度とF/F速度から速度制御器3がF/Bq軸電流指令を出力する。電動機の高速域では速度制御出力切替器7がF/B軸電流指令を出力し低速域では所定の固定値C1を出力する。dq軸電流制御器10、9は電流制御を行い、F/Bdp軸電圧指令を出力する。電動機の高速域ではq軸電流制御出力切替器12がF/Bq軸電圧指令を出力し、低速域では所定の固定値C2を出力する。電圧座標変換部14がdp軸電圧指令を変換して三相電圧指令を作成する。電動機16の電流を変換して電流座標変換部17がdq軸電流を出力し、速度推定器6がdp軸電流とdq軸電圧指令から推定速度を作成する。
(もっと読む)
1 - 20 / 55
[ Back to top ]