
Fターム[5H560XA06]の内容
無整流子電動機の制御 (40,007) | 制御方式 (6,312) | フィードバック制御 (2,621) | 位相制御(PLL) (123)
Fターム[5H560XA06]に分類される特許
1 - 20 / 123
変速装置
モータ制御装置
モータ制御装置
【課題】安定性を確保した位置センサレスの正弦波通電が可能なモータ制御装置を提供する。
【解決手段】モータ制御装置は、単相交流電源を入力とする整流回路と、整流回路と接続され、整流回路で得られた直流電力を三相交流電力に変換し、接続されるモータを駆動するインバータと、小容量のコンデンサと、インバータを制御する制御装置と、単相交流電源のゼロクロス点を検出するゼロクロス点検出回路とを備え、制御装置は、モータの回転数を設定する回転数設定手段と、モータの回転数を補正する第1の回転数補正手段と、第1の回転数補正手段とは異なる方式でモータの回転数を補正する第2の回転数補正手段と、ゼロクロス点の検出からの経過時間に応じて第1および第2の回転数補正手段の一方を選択する回転数補正選択手段とを含む。
(もっと読む)
モータ制御装置

【課題】停止位置によらず、かつ負荷特性が変化した場合にも安定にモータを駆動するモータ制御装置、およびそれを用いた駆動装置を提供する。
【解決手段】回転角度位置に関する情報を用いない同期運転モードと回転角度位置に関する情報を用いて駆動する位置センサレス運転モードとを備え、前記運転モードを駆動中に切り替えるモータ制御装置において、機械角1周期もしくは機械角1周期の整数倍で変動する周期トルク成分を推定する手段を備え、周期トルクの傾きがゼロ近傍または負になる期間に運転モードを切り替えることを特徴とするモータ制御装置。
(もっと読む)
モータ駆動制御装置及び画像形成装置
【課題】素早くかつ安定にモータを起動することができるモータ駆動制御装置を提供する。
【解決手段】モータ10を停止状態から起動するときは第1の駆動方式である矩形波駆動により回転駆動し、回転中は矩形波駆動または第2の駆動方式である正弦波駆動を切り替えて回転駆動する。これにより、回転位置が正確に得られない起動時は分解能の低い回転位置情報だけでも高トルクを発生可能な駆動方式でモータを駆動し、起動して高分解能の回転位置が得られるようになってから、正弦波駆動に駆動方式を切り替えることができる。そのため、素早くかつ安定にモータを起動することができる。
(もっと読む)
駆動装置、画像形成装置および画像形成装置の周辺装置
【課題】高効率であるとともにステッピングモータと同等の加減速時の追従性やモータの耐久性を得ることができる駆動装置、画像形成装置および画像形成装置の周辺装置を提供する。
【解決手段】駆動源としてのインナーロータ型DCブラシレスモータであるモータ101と、モータ101の出力軸の回転量と回転方向を検知するフォトセンサ122、エンコーダディスク123と、モータ101の回転を制御する制御回路121と、制御回路121からの信号に基づいてモータ101に駆動電力を供給するドライバ回路125と、を備える駆動装置151において、制御回路121が、外部から取得したモータ101の目標駆動信号と、フォトセンサ122、エンコーダディスク123から検出される検出信号とに基づいて、ドライバ回路125への信号を変化させることで、モータ101の回転速度または回転位置の少なくとも一方を制御する。
(もっと読む)
モータ制御装置及びモータ駆動システム
【課題】共振型フィルタを用いてモータの振動と騒音を抑制する場合に、脱調や起動不良の発生を解消し、モータの制御も支障無く行うことができるモータ制御装置する。
【解決手段】負荷トルクの変動に対応して変動する制御値を受け、制御値の周期的な変動成分を強調することにより電流補正値を生成する共振型フィルタ30と、共振型フィルタによる変動成分の強調度合いであるゲインを制御するゲイン制御部32を備える。電流補正値を電流指令値に重畳することにより、重畳電流指令値を生成し、重畳電流指令値に従ってモータの制御を行う振動抑制制御を実行する。ゲイン制御部は、振動抑制制御の開始時、所定の目標値に対して徐々にゲインを増加させる。
(もっと読む)
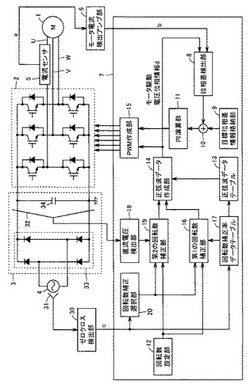
PWMインバータ駆動永久磁石式同期モータおよび換気送風機の制御方法
【課題】モータ発生トルクを高精度に制御できる小形で安価なPWMインバータ駆動永久磁石式同期モータおよび換気送風機の制御方法を得ること。
【解決手段】12,14では位置センサ信号が示す相誘起電圧の位相と該当モータ巻線に流れるモータ電流の位相との位相差を位相差目標値に近づけほぼ一定にし、モータ電流を発生トルクに比例させる。11,9ではPWMインバータ主回路の直流母線に挿入したシャント抵抗器にて直流母線電流を検出し、平均化して求めた直流母線の平均電流を、3の変調率および同期モータの力率相当で除算し、係数倍して、モータ電流フィードバック値Imfを求める。8ではモータ電流指令値Im*とモータ電流フィードバック値との比較結果に基づいて、第1の電圧調整成分(q軸電流指令)の出力を調整することによりモータ電流を目標値に近づける。
(もっと読む)
電気機械装置、移動体、及びロボット
【課題】電気機械装置の回生動作においてを滑らかに動作させる。
【解決手段】電気機械装置10であって、電磁コイル100u〜wを有する第1の駆動部材15と、前記第1の駆動部材15に対して相対的に移動可能な第2の駆動部材20と、前記電磁コイル100u〜wを駆動するとともに、前記第2の駆動部材20の減速時に前記電磁コイル100u〜wからのエネルギーの回生を行う制御部405と、を備え、前記制御部405は、前記電磁コイル100u〜wに生じる誘起電圧のゼロクロス点を中心とした第1の回生区間を設定して回生を実行する第1の回生モードを有する。
(もっと読む)
電気機械装置
【課題】電気機械装置の効率的な制御を行う。
【解決手段】電機機械装置であって、電磁コイルと、前記電磁コイルにPWM駆動信号を供給するためのPWM駆動回路と、前記PWM駆動回路を制御する制御部と、を備え、前記制御部は、前記電磁コイルに前記PWM駆動信号を供給する区間としての励磁区間を設定する第1の制御と、前記PWM駆動信号のデューティ比を変更する第2の制御と、を実行し、前記制御部は、前記第1の制御において、前記励磁区間の中心の位相を、前記電磁コイルに生じる逆起電力の最大値が生じる位相の値よりも早める進角制御を行うとともに、前記第2の制御において、正弦波を模擬するPWM駆動信号を生成する際のゲインを100%としたときに、100%を越えるゲインを実現するように前記デューティ比を増大させる、電機機械装置。
(もっと読む)
モータ制御装置及び乗り物
【課題】弱め磁束制御の実行時に発生しうるトルク誤差を低減する。
【解決手段】軸誤差推定部は、dq座標系と異なる制御座標系との位相差である軸誤差を推定する。qm軸は、最大トルク制御の実現時における出力電流ベクトルの向きと向きが一致する回転軸である。弱め磁束制御の実行時において、モータの出力電流ベクトルがトルク指令値に従った定トルク曲線311に沿うように、弱め磁束用の電流に応じて軸誤差の目標値θtを設定する。軸誤差を目標値θtに一致させるPLLを形成することで、モータの出力電流ベクトルV323の終点は定トルク曲線311上にのる(即ち、出力トルク及びトルク指令値間のトルク誤差がゼロになる)。
(もっと読む)
モータ制御回路
【課題】モータの速度を可変制御するモータ制御回路において、設定されるモータの速度に応じた適切な進角値を自動的に設定可能なモータ制御回路を提供する。
【解決手段】本発明に係るモータ制御回路10は、基準進角値と補正量に比例係数を乗じて得られる進角補正値を加算して、進角設定信号を出力する進角設定手段と、外部から入力される基準信号EXCの周期に対する補正基準周期Ref_countの比を補正量とし、その補正量を進角値設定手段が備える所定の比例係数Ksに乗算して得られる進角補正値により、基準進角値を補正する進角設定補正手段とを備えている。
(もっと読む)
モータの回転制御装置及び方法、並びにそれを用いた画像形成装置
【課題】 瞬間的にクロックが入力されなかった場合でも回転を維持できるPLL制御を用いたモータの回転制御装置及び方法、並びにそれを用いた画像形成装置を提供する。
【解決手段】 PLL制御部12がクロックCKと位置検出信号Stとの差を偏差信号Seとして出力し、コントロール部202が偏差信号と位相検出信号Sfとから駆動信号Smを出力する、モータの回転制御装置において、コントロール部は、偏差信号が入力された場合、駆動信号を遅延させた遅延駆動信号Smdを出力し、遅延駆動信号の出力を開始してから所定時間が経過した後、駆動信号を遅延させずに出力し、モータの使用回転速度は最低回転速度の2倍以上であり、遅延時間は使用回転速度に対応するクロック周期の2倍以上の整数倍であり、所定時間は遅延時間以下である。これにより、瞬間的にクロックが入力されなかった場合でもモータの回転を維持することできる。
(もっと読む)
同期電動機制御装置
【課題】 調整用に逆起電圧を観測できる回転数まで同期電動機を回転させることなく、同期電動機と回転角センサの角度差を調整できる装置を提供することを目的とする。
【解決手段】 少なくとも1つの実施形態の同期電動機制御装置は、回転子に電気的突極性を有する同期電動機2と、同期電動機の回転角度を検出する回転角度センサ3と、同期電動機2を制御する制御指令を受け取るインバータ1と、同期電動機2の任意の回転角度方向に定義した直交座標に基づき、インバータへ出力する制御指令値を出力する電流制御部6と、電流制御部6が出力する制御指令値に対し、電圧を印加する指令を生成する高周波電圧指令生成5部と、制御指令値と電圧を印加する指令に基づき、同期電動機2の電気的突極方向の角度と回転角度センサにより検出される回転角度の回転角度差を演算する角度差演算部10と、角度差演算部10が演算する回転角度差に基づき、回転角度センサを補正する。
(もっと読む)
モータ制御装置、これを用いた圧縮機駆動装置及びこれを用いた冷凍機器
【課題】位置フィードバック運転モード中に必要トルクが急激かつ大きく変化した場合に発生する速度変動を抑制し、必要トルクの変化に対して一様な安定性を持つ制御構成を提供することを目的とする。
【解決手段】モータのトルクに係る電気量を演算する演算手段と、電流指令値を入力とする電流制御器と、前記電流制御器の出力を入力とする電圧指令値作成器と、前記電圧指令値作成器の出力に従って永久磁石モータに電圧を印加する電力変換回路とを備えたモータ制御装置において、位置フィードバック運転モード中にモータのトルクが変化あるいは安定するタイミングをトリガとし、そのトリガに合わせて、変化後のトルクに比例する値を基に、前記演算手段と前記電流制御器のうち少なくとも1つに係る電気量を設定する。
(もっと読む)
電動機の駆動装置
【課題】モータの巻線抵抗やリアクタンスなどのモータ定数を使用せずにモータを駆動することができる電動機の駆動装置を提供する。
【解決手段】本発明の駆動装置は、インバータ10の三相出力電流をトルク電流および磁化電流に変換し、該トルク電流および磁化電流を制御するベクトル制御部11を備える。ベクトル制御部11は、トルク電流指令値とトルク電流との偏差に基づいてトルク電圧指令値を決定するトルク電圧制御部21と、磁化電流指令値と磁化電流との偏差に基づいて磁化電圧指令値を決定する磁化電圧制御部22と、インバータ10の出力電圧と目標出力電圧との偏差に基づいて磁化電流指令値を決定する目標磁化電流決定部26と、目標出力電圧を決定する目標出力電圧決定部27とを備える。目標出力電圧決定部27は、目標出力電圧と角速度との関係を示すV/ωパターンを記憶しており、該V/ωパターンに従って角速度から目標出力電圧を決定する。
(もっと読む)
交流回転機の制御装置
【課題】制御位相を切換える前に負荷が変動しても、切換え中の制御電流ベクトル指令や制御位相が不連続にならず、交流回転機をスムーズに駆動することができる交流回転機の制御装置を得る。
【解決手段】交流回転機1の回転子位置の推定値である推定位相と、交流回転機1の回転速度の推定値である推定速度とを出力する推定手段4と、任意の制御位相上での制御電流ベクトル指令を生成し、回転機電流を制御位相上へ変換した制御電流ベクトルが制御電流ベクトル指令に一致するように電圧指令値を出力する制御手段5とを備え、制御手段5は、外部より入力する速度指令と推定速度とが一致するようして得た実電流指令ベクトルと、制御位相と、推定位相と、予め設定された電流ベクトル設定値とに基づいて制御電流ベクトル指令を生成するとともに、任意に設定した同期位相と推定位相とを相互に切換えて制御位相とする。
(もっと読む)
同期回転機の制御装置、及び同期回転機の制御方法
【課題】永久磁石を用いた回転子を備えた同期回転機における回転子巻線に流す励磁電流の位相を容易に且つ正確に決定することができるようにする。
【解決手段】回転位置検出センサ200を光学式ロータリエンコーダで構成する。具体的に生成部201の一つであるスリット円板201を、同期モータ100の回転軸103に取り付ける。また、生成部201の他の部分であるLED201b及びマスク201cと、検出部202であるフォトトランジスタ231〜233とを、回転軸103と同軸で回転するケース303に取り付ける。そして、固定子巻線に流す励磁電流の位相を変える場合、又は、当該励磁電流の初期位相を決定する場合に、制御部400によりケース303を回転させる。
(もっと読む)
単相交流同期モータおよびその制御方法
【課題】特許文献1のような特殊なモータをさらに改良し、モータの利用効率または稼働率を上げること。
【解決手段】制御部19は、ロック停止、回転速度の過不足または逆転の少なくとも1つまたは複数を検出可能とされ、制御部19のカウンタ41は、その検出回数をカウントし、カウント数が所定の複数回以下のときは、起動運転を再開し、所定の複数回を超えるときは運転を停止する制御を行う単相交流同期モータ1を構成する。
(もっと読む)
電動機の磁極位置推定装置
【課題】電動機の電流制御の精度および安定性を向上させ、磁極位置の推定精度の低下を防止する。
【解決手段】電動機の磁極位置推定装置は、モータへの通電に対するγ軸電圧指令値Vγ及びδ軸電圧指令値Vδが、基準電圧Vsγ,Vsδに対する正側パルス電圧Vpγ,Vpδであるときに磁極位置誤差演算部63により算出された位相差Δθeと、γ軸電圧指令値Vγ及びδ軸電圧指令値Vδが、基準電圧Vsγ,Vsδに対する負側パルス電圧Vnγ,Vnδであるときに磁極位置誤差演算部63により算出された位相差Δθeとの平均値を算出する磁極位置誤差平均演算部64と、この平均値に基づきモータの磁極位置を演算する回転速度−磁極位置演算部49とを備える。
(もっと読む)
1 - 20 / 123
[ Back to top ]