
Fターム[5H572LL44]の内容
Fターム[5H572LL44]に分類される特許
1 - 13 / 13
モータ制御システム、制御装置、並びにモータ内蔵ローラと制御装置の組み合わせ
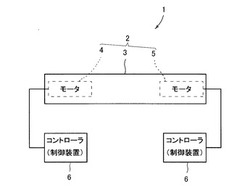
【課題】2以上のモータが強制的に同期させられる場合において、各モータへの供給電流のアンバランスを抑制可能なモータ制御システム、制御装置、並びにモータ内蔵ローラと制御装置の組み合わせを提供することである。
【解決手段】モータ制御システム1は、モータ内蔵ローラ2と、コントローラ(制御装置)6,7の組み合わせからなるものである。モータ内蔵ローラ2は、ローラ本体3とモータ4,5を有している。モータ4,5は、出力軸同士がローラ本体3で一体的に連結されており、モータ4,5は、強制的に同期運転するものである。モータ4,5の回転数に応じてコントローラ6,7から供給する電流パルスに下限が設定されている。
(もっと読む)
画像形成装置

【課題】回転多面鏡における回転速度の微調整幅の高分解能化と、回路の規模の簡略化とを両立させる。
【解決手段】回転状態検知手段は、回転多面鏡の回転状態を検知し、回転状態を示す回転状態信号を出力する。第1クロック生成手段は、第1クロックを生成する。回転基準信号生成手段は、第1クロックにしたがって順序回路動作を行い、回転多面鏡の回転基準となる回転基準信号を生成する。第2クロック生成手段は、回転基準信号の周期よりも短く、かつ、第1クロックの周期よりも長い周期の第2クロックを生成する。受信手段は、第2クロックにしたがって順序回路動作を行い、回転基準信号を受信する。位相差測定手段は、第2クロックにしたがって回転状態信号と回転基準信号との位相差を測定する。制御手段は、位相差に基づいて駆動手段に加速信号または減速信号を供給する。
(もっと読む)
画像形成装置
【課題】ピーク電流を抑制しつつ高速な起動が可能なモータ制御を実行する画像形成装置を提供する。
【解決手段】CPUは、画像形成装置の電源がオンされたかどうかを判断する(ステップS1)。CPUは、電源がオンされたと判断した場合には、次に、モータ間通信を開始する(ステップS2)。そして、次に、CPUは、モータ台数を確認する(ステップS3)。CPUは、モータ台数に応じて位相ずらし量を設定する(ステップS4)。具体的には、モータ台数(N)に応じて位相ずらし量を1/N周期に設定する。そして、次に位相ずらし量を設定する指示を出力する(ステップS5)。
(もっと読む)
輪転印刷機および輪転印刷機の停電制御方法
【課題】装置構成をコンパクトにすると共に装置コストを抑制し、ウェブを好適に搬送停止させることが可能な輪転印刷機等を提供する。
【解決手段】複数の駆動モータ20,28,30,38,40,45の回転に連動する複数の印刷胴をそれぞれ回転させて、ウェブWを搬送しながら印刷を行う印刷装置Uと、印刷装置UによるウェブWの搬送速度を制御可能な制御装置25,29,35,39,43,47,50,51と、を備えた輪転印刷機10において、制御装置は、速度レートを出力可能な通信部Pと、出力された速度レートに基づいて各駆動モータを制御可能な複数のモータドライバ25,29,35,39,43,47と、を有し、通信部Pは、停電発生直後において停電用減速レートA2を出力し、停電中における各駆動モータの回生動作の開始後において停電用減速レートA2に比して小さい減速率となる停電用補正減速レートA3を出力する。
(もっと読む)
電動車両の駆動システムの制御装置および制御方法
【課題】複数の駆動輪とモータユニットを備え、1つのモータユニットで異常が生じても、複数の駆動輪の各々の動作状態を一致させて電動車両の挙動を安定化させる。
【解決手段】電動車両の駆動システムの制御装置は、複数の駆動モータ31の各目標トルク指令値を運転者操作と車両挙動に応じて演算する目標トルク演算手段32、目標トルク演算手段から出力された各指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段33、複数の駆動モータあるいは複数の駆動モータの駆動経路のうち少なくともいずれか1つに異常が発生したときに異常を検知する異常検知手段34、検知された駆動モータあるいは駆動モータの駆動経路に対応する駆動モータの動作状態を判別する動作状態判別手段35、動作状態判別手段により判別された駆動モータの動作状態に合わせて他の駆動モータの動作状態を制御する同期制御手段36とを備える。
(もっと読む)
マルチ駆動モータの制御装置
【課題】マルチ駆動モータに関するサーボ制御を簡易化することが可能な制御装置を提供する。
【解決手段】第1の要素モータ11が有する位置検出装置11bから出力されたモータの回転軸の角度についての位置情報に基づいて、目標値に対して所定範囲内に制御するための制御信号を生成する制御処理部1aと、制御処理部1aからの制御信号に基づいてマルチ駆動モータをなす各要素モータ11、12、13、14を駆動するドライバ1bを備え、要素モータ11、12、13、14は、それぞれ3相の同期ACモータからなるモータ11a、12a、13a、14aを有し、要素モータ11は、モータ11aに接続された上記の位置検出装置11bを有し、ドライバ1bは、要素モータ11、12、13、14毎に、モータの相(U相、V相及びW相)数、3本のモータ電流線1cを介してモータを駆動するためのモータ電流を出力する構成を有している。
(もっと読む)
システム同期方法、これを行うPWM信号発生装置、及びこれを備えた電動機制御システム
【課題】 不必要にPWM信号の瞬時変化を発生させること無しに、上位装置と同期することができるPWM信号発生装置を提供する。
【解決手段】 上位装置からシステム同期信号が入力されるとタイマ値を保持するタイマ値保持回路と、周期パルスが発生される毎に、保持されたタイマ値を減じる調整カウンタと、周期パルスとタイマ値を用いて、同期のために調整信号を演算し、PWM周期タイマに出力する調整信号発生回路とを備える。
(もっと読む)
ランプ製造装置
【課題】ランプ製造に際して各種工程における各加工装置が精度よく同期動作できるようにするとともに、コストの増大を抑制することができるランプ製造装置を提供する。
【解決手段】ランプ製造装置100は、封止装置41等の加工装置、マスター31、伝送路33を備える。マスター31は、基準位相角度生成手段51、パルス信号生成手段52を備え、基準位相角度を生成し、基準位相角度に対応するパルス信号をスレーブ32に出力する。パルス信号は、予め定められた特定パルス列に当てはめて出力される。スレーブ32は、基準位相角度復元手段53、加減速信号出力手段54、インバータ55を備え、基準位相角度復元手段53は、入力されたパルス信号からなる参照パルス列から基準位相角度を復元する。復元された基準位相角度とモータ56の機械軸の位相角度等とに基づいて、インバータ55に加減速信号を出力し、モータ56の機械軸を制御する。
(もっと読む)
サーボシステム
【課題】複数のサーボ軸が相互に与える影響について詳細分析可能なサーボシステムを提供する。
【解決手段】サーボアンプ12は、サーボ演算周期を通信周期の1/n倍(nは整数)で同期させる同期手段15と、サーボ演算周期にてサーボ演算処理をするサーボ演算手段14と、サーボ演算処理で使用した制御データ17の一部であるサーボ演算情報37をサーボ演算周期の過去m回分保存する記憶手段16とを備え、上位装置11は同期型シリアル通信手段13とは別に外部装置19とデータ交換を行う非同期型シリアル通信手段18を有し、同期型シリアル通信手段13を通じて接続される全てまたは一部のサーボアンプの記憶手段16に対して、同期型シリアル通信手段13を介してサーボ演算情報37の保存開始と保存停止を指示し、さらに記憶手段16に保存されたサーボ演算情報37を読み出し、非同期型シリアル通信手段18を介して外部装置19に表示する。
(もっと読む)
印刷機および印刷機の制御方法
【課題】 複数のモータ間における同期崩れを防止するとともに、試し刷りを行うことなく同期の確認をすることができる印刷機および印刷機の制御方法を提供する。
【解決手段】 印刷ユニット3内のモータ17と、複数のモータ17をそれぞれ制御する複数のモータ制御部27と、複数のモータ17の回転位相をそれぞれ検出する複数の位相検出部19と、複数のモータ17のそれぞれに対する回転位相を制御する指令値を、複数のモータ制御部27に出力する同期制御部31と、が設けられ、同期制御部31は、複数のモータ17が同期して駆動されている際における複数の位相検出部19の出力値の差を基準位相差として記憶し、所定のタイミングで、複数の位相検出部27から取得した複数の出力値から位相差を算出し、算出された位相差と基準位相差とを比較することを特徴とする。
(もっと読む)
動力回収システム
【課題】系統保護機能等を備えることなく、エネルギー源のエネルギーを用いて生成された電力を有効に利用できるようにする。
【解決手段】系統電源に系統連系される主電源系統と、
前記主電源系統に接続された電動機と、
前記主電源系統とは独立して構成され、エネルギー源のエネルギーを利用して生成された電力を供給してこの電力に応じた前記電動機への駆動力付与が可能な補助電源系統と、
前記電動機による逆潮が生じないように、前記補助電源系統による電力供給を制御する制御器と、を備えている
(もっと読む)
モータ制御装置
【課題】速度制御への影響を抑制しつつモータ間の回転量のずれをなくすことができるモータ制御装置を提供する。
【解決手段】モータ4,8の回転速度の平均値Ymを平均速度演算部12で求め、これを目標速度にフィードバックして、並進速度コントローラ30により2つのモータをそれぞれの回転速度が等しくなるように同期制御する。また、各モータ4,8の回転量の平均値Xmを平均回転量演算部13で求め、この平均値Xmと各モータ4,8の回転速度Xa,Xbとの偏差に基づく差動信号Za,Zbを生成して、各モータ4,8の回転量を個別に制御することにより、回転速度に影響を与えることなく、2つのモータの回転量が等しくなるようにする。
(もっと読む)
2軸間の同期制御方法および同期制御装置
【課題】2軸間で正確に同期して運転するための同期制御装置を提供する。
【解決手段】サーボ制御装置を2台201、202有し、コントローラ207からの位置指令を通信手段205を介して2台のサーボ制御装置201、202に同時に入力する2軸間同期制御方法において、2軸間に通信手段206を持ち、一方が同期タイミング信号送信手段を持ち、他方は受信手段を持ち、同期タイミング信号を受信するタイミングで位置指令及び位置検出器203、204からの位置を入力するようにした。
(もっと読む)
1 - 13 / 13
[ Back to top ]