
Fターム[5H680DD75]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 移動子、振動子の構造 (8,146) | 移動子と振動子との関係 (1,736) | 移動子と振動子との押圧手段 (613) | バネによるもの (483) | 皿バネ (29)
Fターム[5H680DD75]に分類される特許
1 - 20 / 29
超音波モータユニット、レンズ鏡筒及び撮影機器
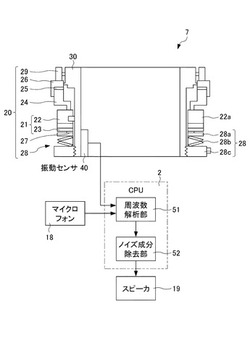
【課題】動画撮影を行う場合に、不要な作動音の録音を除去することを可能にする。
【解決手段】固定筒30と、前記固定筒の外周に設けられ、圧電素子への通電により弾性体に超音波振動を生じさせ、前記弾性体に圧接された移動体を前記超音波振動により移動させる超音波モータ20と、前記固定筒の内周側に設けられ、前記超音波モータの駆動時に発生する振動を検出する振動センサ40とを備える。
(もっと読む)
超音波モータ及びそれを有するレンズ装置

【課題】 超音波モータにおいて、振動子の押圧力の調節機構は構成部品が多く複雑であり、また、ほんのわずかな調整で振動子対する押圧力が大きく変化してしまうため繊細な調整が必要であった。
【解決手段】 超音波モータは、被駆動部と接触する接触面を有し、圧電素子が固定された振動子であって、前記圧電素子によって励振された超音波振動によって前記被駆動部を駆動する振動子と、固定部に支持され、前記接触面を前記被駆動部に押圧するように、前記振動子に付勢力を付与する加圧手段とを有する超音波モータであって、前記加圧手段は、前記接触面に対し垂直な方向に移動可能である一方、前記接触面に対し平行な方向への移動が規制されるよう当該固定部に保持された加圧部材と、当該加圧部材を介して前記振動子に当該接触面に対し垂直な方向の押圧力を付与する弾性部材とを備える構成とした。
(もっと読む)
注入機器及び超音波モータの制御方法
【課題】超音波モータのステータとロータの固着を効率的に解除することができる注入機器を提供する。
【解決手段】 本発明の注入機器は、薬液を注入するための注入機器1であって、超音波モータ31を有する超音波モータ部3と、超音波モータ31が正転するときに薬液を送り出すように、超音波モータ部3によって駆動される駆動機構4と、超音波モータ部3の超音波モータ31を制御する制御装置5とを備え、超音波モータ31は、ステータ32及びロータ33を有し、制御装置5は、ステータ32とロータ33の固着を解除するために、超音波モータ31が正転と逆転を交互に繰り返すように制御する。
(もっと読む)
振動波モータ、レンズ鏡筒及びカメラ
【課題】好適な駆動性能を得ることができ、且つ静寂に駆動可能な振動波モータを提供する。
【解決手段】本発明の振動波モータ10は、駆動信号により励振される電気機械変換素子13と、前記電気機械変換素子13に接合され、前記励振により駆動面18aに進行性振動波を生じる弾性体14と、前記弾性体14の駆動面18aに加圧接触される摺動面を有し、前記進行性振動波によって駆動される相対運動部材12と、前記電気機械変換素子13に前記駆動信号を与える駆動装置50と、を備える振動波モータ10において、前記駆動装置50は、前記弾性体14の前記駆動面18aに発生する振動振幅をa値と定義し、前記弾性体14の前記駆動面18aに発生する進行波の波長をλと定義した時、a値/λ≦0.00025を満たす進行性振動波を前記駆動面18aに発生させる駆動信号を前記電気機械変換素子13に与えること、を特徴とする。
(もっと読む)
振動アクチュエータ、それを備えるレンズ鏡筒及びカメラ
【課題】安定した駆動特性を有する振動アクチュエータ、それを備えるレンズ鏡筒及びカメラを提供する。
【解決手段】本発明の振動アクチュエータ(10)は、振動部材(11)に加圧接触され、前記振動部材(11)の振動により、前記振動部材(11)との間で相対移動する相対移動部材(14)と、前記振動部材(11)と前記相対移動部材(14)とを加圧接触させる加圧部材(18)と、前記加圧部材(18)の加圧力を、磁力によって調整する磁力発生部(18s,18c)とを備えること、を特徴とする。
(もっと読む)
振動型アクチュエータ
【課題】 振動型アクチュエータの振動体が円形である場合、この振動体に振動を発生させると、移動体との接触部の内周側と外周側とで振動変位の角度に差が生じてしまうため、接触部の面積を広げることができず、高い駆動効率を得ることができなかった。
【解決手段】 移動体と振動体の間に配置される摩擦部材を、振動体に固定される複数の固定部と、前記移動体に接触する接触面が形成された接触部と、前記接触部と前記複数の固定部の間に位置する変換部とから構成する。そして、この変換部を、固定部から延伸した斜面で構成し、かつ、円形の振動体の外周側よりも内周側で斜面の傾斜角度を緩やかに形成する。
(もっと読む)
超音波モータ及び超音波モータ付電子機器
【課題】
大きなトルクを発生させるとともに、トルクを安定させる。
【解決手段】
そこで、上記課題を解決する為に本発明の超音波モータは、圧電素子を有する矩形形状の圧電振動子と、圧電振動子の振動により圧電振動子と相対運動する移動体と、圧電振動子に加圧力を与える加圧部材と、圧電振動子の周囲に設けられ、圧電振動子が挿入される空間の内面が圧電振動子に設けられた凸部を形成する固定部材と接するように形成されており、圧電振動子を加圧部材による加圧方向に摺動して案内する案内部材と、を備えた。
(もっと読む)
超音波モータ
【課題】ステータを出力軸から離間させた状態でのステータと出力軸との同軸度の高精度化を低コストで実現することができる超音波モータを提供する。
【解決手段】超音波モータ1は、電気−機械エネルギ変換素子を支持する支持部材13を有するステータ10と、支持部材13が固定された状態でステータ10を覆う外筒30と、ステータ10の振動体に励起した振動により駆動されるロータ20と、ロータ20の駆動力により回転駆動される出力軸24と、を備える。支持部材13は、出力軸24に対して係合する係合部13aを有し、該係合部13aは、出力軸24の軸方向に変形可能とされて、該変形後に出力軸24に対する係合が解除される。
(もっと読む)
駆動装置及び駆動装置ユニット
【課題】軸方向の振動を阻害せずに振動軸の軸回転を防止できる軸受け部を備え、小型で高い位置精度を有する駆動装置及び駆動装置ユニットを提供する。
【解決手段】振動軸と軸受け部は、互いに当接して該振動軸の軸回転を規制するための規制面をそれぞれ有し、振動軸の規制面を、軸受け部の規制面に当接して押圧する。このときの押圧力を、振動軸が振動中に軸受け部からうける最大抵抗力が、移動部材と振動軸との間の最大摩擦力の2.5倍以下となるようにする。
(もっと読む)
電気機械式のモータ、特に圧電式のマイクロステッピング駆動装置
本発明によるマイクロステッピングモータは、ほぼ互いに直角に向けられた作用方向を有する2つの電気機械式の駆動エレメント(101,102)、特にピエゾ曲げ変換器を有している。これらのアクチュエータ(101,102)は駆動リング(1)に作用し、これによりシャフト(208)を回転させる。これらのアクチュエータ(101,102)は、内側に位置する駆動リング(1)と、フレーム(4)と、U字形のアウタフレーム(6)とを備えた、ねじり剛性的な、互いに内外に入り組んだフレーム形の全体構造体(駆動モジュール)を介して非半径方向で駆動リング(1)に枢着されている。駆動モジュールが射出成形部品として一体に形成されているコンパクトな駆動装置が得られる。  (もっと読む)
(もっと読む)
ピエゾ式駆動装置
【課題】送信又は受信される電波が遮断されることが抑制可能なピエゾ式駆動装置を提供すること。
【解決手段】所定周波数の駆動信号がピエゾ素子21に入力され、軸線AXに沿って対象物16が移動されるピエゾ式駆動装置50であって、駆動信号の入力に基づいて伸縮するセラミックス材料のピエゾ素子21と、ピエゾ素子21からの力を受けて軸線AXを中心に回転する非金属の回転体25と、を備える。回転体25はセラミックス材料からなることが好ましい。
(もっと読む)
振動アクチュエータ装置、レンズ鏡筒、カメラ
【課題】安定した駆動を行うことができる振動アクチュエータ装置、レンズ鏡筒、カメラを提供する。
【解決手段】振動アクチュエータ装置は、信号発生部(L1,L2,102,103)が発生した信号により励振される電気機械変換素子(13)を有する振動子(11)と、前記振動子と接触して配置され、前記振動子との間で相対運動を行う相対運動部材(17)と、前記振動子と前記相対運動部材とを加圧接触させる加圧力を生じる加圧部(15)と、前記信号発生部が発生した信号をモニタし、モニタした信号に基づき前記加圧力を変化させる加圧力変化部(103,105,15c)とを備える。
(もっと読む)
振動アクチュエータ
【課題】高い保持力と長い寿命を併せ持つ振動アクチュエータを提供することを課題とする。
【解決手段】振動手段3の駆動停止時には、駆動回路5から変形素子11に電圧が印加されることはなく、したがって変形素子11は伸縮されずに所定の厚さH0を有している。このとき、皿バネ10の付勢力により、変形素子11及び予圧部材12を介してロータ8がステータ2に加圧される。一方、振動手段3の駆動時には、駆動回路5から変形素子11に所定の負電圧が印加され、変形素子11が所定の厚さH0よりも小さい厚さに縮むことにより、皿バネ10の付勢力が小さくなり、その結果、ロータ8のステータ2に対する予圧力が小さくなる。
(もっと読む)
超音波モータ
【課題】高負荷時に於いても、圧電体の励振が不安定になり制御性が失われることのない超音波モータを提供する。
【解決手段】圧電体の励振に2枚の圧電体を張り合わせて用い2枚の圧電体の電極をΔ結線することにより、積層された夫々の圧電体が、互いに60°の位相差をもって励振するようにして、固定子の励振を安定化させる。さらに積層しΔ結線したことにより、圧電体の印加電圧を下げることができる。
(もっと読む)
駆動装置
【課題】コンパクトな構成で効率良く駆動出力を取り出すことができる駆動装置を提供する。
【解決手段】駆動装置は、共振周波数の電圧を印加することにより駆動方向に対して垂直方向に伸縮変形を行う縦一次振動モードと屈曲変形を行う屈曲一次振動モードとを励起可能な振動部4と、振動部4の両サイドを加圧状態で挟持する2本のガイド棒3とを備えている。上記の縦一次振動モードと屈曲一次振動モードとを振動部4で励起することにより、ガイド棒3と接触する振動部4の両サイド、つまり突起部411〜412および突起部413で互いに逆回りとなる回転運動Ka、Kbが生じるが、この回転運動を用いて振動部4がガイド棒3に対して移動する。このような駆動装置により、コンパクトな構成で効率良く駆動出力を取り出すことができる。
(もっと読む)
超音波モータ、および超音波モータの作製方法
【課題】φ1.5mm以下の超小型の超音波モータを提供する。
【解決手段】超音波モータ2は、構成する部品が薄膜パターンで形成され、常温接合を応用した技術により、接合面を直接接触させて接合して作製される。共通電極21bは、圧電体11に形成された駆動電極20bの所定位置に接合される。圧電体11と振動板12とは、駆動電極20aおよび共通電極21aを接合層として接合される。寸法精度、組み立て精度が高い超小型の超音波モータ2を得ることができる。
(もっと読む)
駆動制御装置及び駆動制御方法
【課題】安価なCPU構成によって、制御の初期段階から所定レベル以上の精度での駆動制御を実現する。
【解決手段】所定方向に沿った圧電素子12の伸び速度と縮み速度とを異ならせるよう駆動パルスの供給を制御して圧電素子12を伸縮させることで駆動棒17を振動させ、駆動棒17に摩擦係合したレンズ21を所定方向に沿った双方向に移動させる駆動制御装置20において、レンズ21の焦点合わせ動作の前に、双方向それぞれについて規定の移動距離だけレンズ21を移動させるに要した実駆動パルス数を測定する実駆動パルス数測定手段32と、双方向それぞれの実駆動パルス数と予め定めた基準パルス数とに基づいて駆動パルス数に関する補正係数を算出する補正係数算出手段33と、双方向それぞれの補正係数に基づいて、圧電素子12へ供給される駆動パルス数を補正する駆動パルス数補正手段34とを備えた。
(もっと読む)
駆動制御装置及び駆動制御方法
【課題】被駆動部材を位置決め動作開始基準位置へ移動させる際の補正を行い、より高い精度の駆動制御を行う。
【解決手段】所定方向に沿った圧電素子12の伸び速度と縮み速度とを異ならせるよう駆動パルスの供給を制御して圧電素子12を伸縮させることで駆動棒17を振動させ、駆動棒17に摩擦係合したレンズ21を所定方向に沿った双方向に移動させる駆動制御装置20において、レンズ21の焦点合わせ動作の開始位置についての補正量に対応する予め調整された補正駆動パルス数を記憶したEEPROM36と、レンズ21の焦点合わせ動作前に補正駆動パルス数を読み出す読出し手段33と、該補正駆動パルス数に基づいて、レンズ21を上記開始位置へ移動させるための駆動パルス数を補正する補正手段34と、補正後の駆動パルス数に応じた駆動パルスを圧電素子12へ供給する移動制御手段31とを備える。
(もっと読む)
駆動制御装置及び駆動制御方法
【課題】低輝度時や低コントラスト時のような測距が困難な場合でも、被写体の輝度に応じて行うべき、撮影のための適切な更なる設定を実現する。
【解決手段】圧電素子12の伸び速度と縮み速度とを異ならせるよう駆動パルスの供給を制御して圧電素子12を伸縮させることでレンズ21を所定方向に沿って移動させる駆動制御装置20において、被写体の輝度を計測する測光手段31と、輝度が規定数値範囲の範囲内である場合に、固定焦点閾値を算出する閾値算出手段32と、レンズ21を駆動方向に移動させながらAF評価値を測定するAF評価値測定手段33と、輝度が規定数値範囲の範囲外である場合、又は、AF評価値の高低差が固定焦点閾値未満である場合に、レンズ21を固定焦点位置へ移動させる固定移動制御手段34とを備える。
(もっと読む)
回転型超音波モータ
【課題】トルクを低下させることなくモータ出力軸を高速で回転させることのできる回転型超音波モータを提供する。
【解決手段】モータケース21と、モータケース21に対して回転可能に設けられたモータ出力軸22と、モータケース21に固定された第1のステータ23と、第1のステータ23と協働して第1の超音波モータ部27を構成する第1のロータ24と、モータ出力軸22に固定された第2のステータ25と、第2のステータ25と協働して第2の超音波モータ部28を構成する第2のロータ26とを備えて構成されている。
(もっと読む)
1 - 20 / 29
[ Back to top ]