
Fターム[5J070BB03]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468) | 距離追跡 (29)
Fターム[5J070BB03]に分類される特許
21 - 29 / 29
目標航跡相関装置及び目標航跡の相関判定方法

【課題】各センサから得られる複数の目標速度がほぼ同一の場合においても誤相関を軽減できるようにした目標航跡相関装置を提供する。
【解決手段】複数のセンサの各々により得られる目標に関する複数の航跡情報が同一の目標に関する情報であるか否かを判定する目標航跡相関装置において、各センサが求めた目標の追尾速度ベクトルのなす角度を算出する目標追尾速度ベクトル差算出器と、前記センサにより得られる航跡情報の誤差を追尾回数毎及びセンサ毎に予め設定しテーブル化した追尾誤差テーブルと、前記航跡情報の誤差に基づいて、前記目標の追尾速度ベクトルのなす角度の相関しきい値を設定するしきい設定器と、前記目標の追尾速度ベクトルのなす角度と、前記相関しきい値とを比較して、前記複数の航跡情報が同一の目標に関する情報であるか否かを判定する航跡相関判定器とを備えるようにした。
(もっと読む)
探知距離算出方法およびこれを用いたレーダシステム

【課題】算出される探知確率の誤差を小さくでき、しかも目標機の飛行回数を増やさずに、探知確率の信頼性を上げることができる探知距離算出方法。
【解決手段】目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出する区間毎平均信号強度比算出ステップと、算出された平均信号強度比から信号強度比を信号対雑音比に変換する信号強度比・信号対雑音比変換ステップと、変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化する信号対雑音比正規化ステップと、正規化された信号対雑音比を探知確率に変換する信号対雑音比・探知確率変換ステップを含む。
(もっと読む)
目標類別装置
【課題】蛇行目標の類別性能を向上させる目標類別装置を得る。
【解決手段】追尾情報の目標の距離で受信信号の位相補償を行い、補償後の信号に基づき算出したドップラー周波数により補償後の信号を更に位相補償し、再補償した信号に基づきドップラープロフィールを生成し、追尾情報、上記変化量率から推定したアスペクト角の変化量に基づいてドップラープロフィールをクロスレンジプロフィールに変換し、追尾情報に基づいて推定したアスペクト角に対応する候補目標の受信信号をライブラリから抽出して候補目標のドップラープロフィールを算出し、該ドップラープロフィールをアスペクト角の変化量に基づいて参照プロフィールに変換し、両プロフィールに基づいて観測目標と候補目標の特徴量をそれぞれ算出し、両特徴量を比較して目標類別を行う。
(もっと読む)
航跡相関統合装置
【課題】目標情報のより状況認識を行い易い表示を提供できる航跡相関統合装置を得る。
【解決手段】最初の航跡相関統合は、レーダ航跡生成部1で生成された航跡と角度センサ航跡生成部2で生成された航跡の全ての組合せの相関の尤度を計算して航跡同士の組合せの相関の有無を判定し、2回目以降の航跡相関統合は、レーダ航跡生成部1及び角度センサ航跡生成部2で生成された航跡と既存のグループの相関の尤度を計算して前記航跡と前記グループとの相関の有無を判定する航跡相関部3と、航跡相関部3により相関有りと判定された航跡同士、又は航跡と既存のグループは必ず同一のグループに入るようにグループ化し、グループの中心位置と広がりを計算するグループ処理部4と、1対1対応がとれた航跡群は統合航跡を表示し、1対1対応がとれない航跡群は前記グループの中心位置と広がりに基づきグループを楕円で表示する統合航跡・グループ表示部6とを設けた。
(もっと読む)
電波照射装置、および誘導装置
【課題】 海面からのマルチパスの影響によって、目標体に照射され目標体で反射される反射波のレベルが低下するという問題があった。
【解決手段】 目標体の存在方向、目標体高度および目標体までの距離の情報を計測し、計測した目標体の情報に基づいて、アレイアンテナ装置の送信ビームの指向方向を、目標体の存在方向から所定角度だけ上方にオフセットさせることによって、目標体に照射される電波に対するマルチパスの影響を緩和することができる。
(もっと読む)
到来時刻推定装置
【課題】 受信信号と参照信号の周波数が一致していない場合でも、電波の到来時刻を推定できるようにする。
【解決手段】 受信信号サンプリング部1により受信された信号の時間波形から共分散行列を生成する受信信号共分散行列計算部2と、空間に周期的に発信された信号の時間波形から到来時刻と周波数シフト量の関数であるモードベクトルを計算するモードベクトル計算部3とを設け、その受信信号共分散行列計算部2により計算された共分散行列とモードベクトル計算部3により計算されたモードベクトルを用いてMUSIC処理を実施することにより、受信信号サンプリング部1により受信された信号の到来時刻を推定する。
(もっと読む)
オブジェクトの間隔及び速度測定のための装置
本発明はレーダパルスによるオブジェクトの間隔及び速度を測定するための装置に関し、これにより送信及び受信されるレーダパルスは互いに受信側のミキサ(8)において相関される。レンジゲートを設定するための制御装置(7)において、ミキサ(8)に供給される送信側のレーダパルスはそのパルス遅延に関して連続的に上昇及び/又は下降して変化可能である。切り換え装置はドップラー周波数測定モードに切り換えられるか又は距離測定モードにリセットされる。 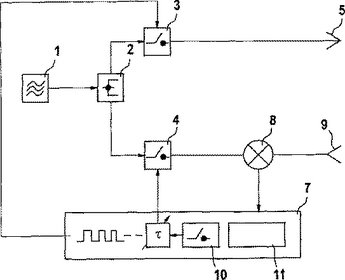 (もっと読む)
(もっと読む)
目標追尾装置
【課題】既追尾目標から複数の目標が分離する状況において、高い推定精度を達成する目標追尾装置を得る。
【解決手段】距離情報算出部と、単数複数判定部と、単数角度情報算出部と、複数角度情報算出部と、観測結果出力部とを有する観測情報抽出部と、データ記憶部と、軌跡推定部と、軌跡評価部とを有する追尾処理部とを備える目標追尾装置において、追尾処理部は、単数複数判定部で判定された単複判定結果に基づいて、単数であると判定されたときは、軌跡評価部で生成された航跡の仮説の中から既存の本航跡の更新による航跡の仮説のみを残し、複数であると判定されたときは、軌跡評価部で生成された航跡の仮説の中から既存の本航跡の更新による航跡の仮説を残すとともに、既存の本航跡から分離発生した新目標に相当する航跡の仮説を残す仮説限定部をさらに備える。
(もっと読む)
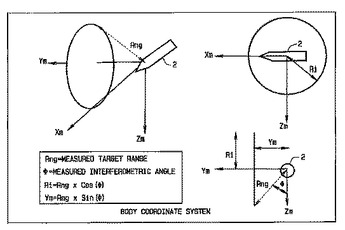
レーダ戻りデータを重み付ける方法および装置
前記レーダターゲット(48)の位置を決定することにおいて位相レーダエコーからの加算による地勢エコーフェーディングの影響を減少する方法が提供される。この方法は、レーダターゲットの地勢特徴から生じるレーダエコーフェーディングの程度に比例する、干渉角Φへ寄与する地勢特徴の影響を調整することにより、少なくともひとつのレーダエコーに基づきレーダターゲットへの干渉角Φを決定するステップと、干渉角Φをフィルタリングするステップとを含む。訂正された干渉角Φは、フィルタリングの少なくとも一部に基づいて提供される。
 (もっと読む)
(もっと読む)
21 - 29 / 29
[ Back to top ]