
Fターム[5J083BE26]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | 受信信号の検出 (729) | パルス波形処理 (8)
Fターム[5J083BE26]の下位に属するFターム
Fターム[5J083BE26]に分類される特許
1 - 5 / 5
アクティブソーナー装置及びその信号処理方法
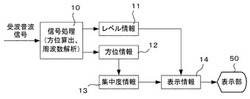
【課題】アクティブソーナー装置において、目標をより確実に検出できるようにする。
【解決手段】アクティブソーナー装置における信号処理方法は、第1の時間幅を有する音波信号を媒質に送波することと、媒質を伝播してきた音波信号を受波音波信号として受波することと、受波音波信号の時間軸を第1の時間幅よりも短い第2の時間幅で区切ったものをそれぞれ時間セルとして、各時間セルごとに、受波音波信号の到来方位と強度とを求めることと、各時間セルごとに、その時間セルを含む複数の連続する時間セル内での到来方位の方位集中度を算出し、その時間セルでの強度に方位集中度を重み付けしたものを検出値とすることと、を有する。
(もっと読む)
超音波距離測定装置

【課題】振幅の増減があっても確実に超音波の受信確認が可能な、送信部と受信部間の距離を算出する超音波距離測定装置を提供する。
【解決手段】発信部グループ10の超音波発信部11は、発信時刻になるとともに正負および負正のいずれかの所定の順で超音波の発信を開始するとともに赤外線発信部12を経由して受信部グループ20の赤外線受信部51に発信開始を通知し、受信部グループ20の超音波受信部30は、受信した超音波の半位相の波形に、超音波の半位相分の波形を半位相遅延させて符号反転した波形を加算し、加算された2発目の波形の波高を予め設定されているしきい値と比較し、加算された2発目の波形の波高がしきい値を超えた場合は超音波の受信が確認されたとしてその時刻と、赤外線受信部51によって受信された超音波発信時刻との差を到達所要時間とし、超音波発信部と超音波受信部との距離を算出する。
(もっと読む)
水中探知装置
【課題】
尾引き信号に影響されることなく水面近くの魚群を探知でき、かつ、海底からのエコーや、尾引き信号の影響を受けてない水面から離れた深度範囲に分布している魚群からのエコーを、本来の信号強度に対応した色で表示することができる水中探知装置を提供すること。
【解決手段】
尾引き信号除去処理を行う深度範囲を最適に制御する尾引き信号除去範囲制御部12を設け、尾引き信号除去部6における尾引き信号除去処理を、尾引き信号の影響を受ける深度範囲に限定して行うようにした。
(もっと読む)
水中探知装置
【課題】正確に魚体長検出や魚種判別を行うことができる水中探知装置を提供することを目的とする。
【解決手段】超音波信号を送信する送信部3と、送信信号に対する物標からの反射波を受信する受信部4と、前記受信部で受信した受信信号から、単体魚からの反射信号を抽出する抽出部6と、前記単体魚からの反射信号のうち、所定の信号レベル以上で連続する反射信号の波形情報を取得し、該波形情報に基づいて、魚に関する情報を生成する情報生成部7とを備える。これにより、単体魚からの反射信号の時間的変化、つまり反射信号の波形の情報から、魚体長情報や魚種情報などの魚に関する情報を生成することができる。
(もっと読む)
アクティブソナーのデータ解析方法及び記憶媒体
【課題】アクティブソナーにおいて、ターゲットから反射して得られたエコーデータは瞬間的に存在するのみであり且つこのエコーは様々な影響を受け、その包絡線は不規則で多種多様になる。そのため、斯かるアクティブソナーのエコーを画一的に解析し、2次元に可視化する方法はなく、統計的なものに頼らざるを得なかった。
【解決手段】検波後のエコーデータを画一的に解析するために、伝播損失補正正規化処理(ステップA2)を行う。そして、この補正後の波形データについて、特徴データ抽出処理(ステップA3)において、ピークレベル検出処理(ステップB1)、エコー長検出処理(ステップB2)およびエコー形状判定処理(ステップB3)を含む特徴データ抽出処理(ステップA2)を行う。また、特徴データを自己組織化マップに入力して学習を行って、これらの特徴に基づいて分類を行い、2次元可視化する。更に、補正後波形データを用いて誤分類データを検索し、マップ上に表示するための誤分類データ検索処理(ステップA12)を行う。
(もっと読む)
1 - 5 / 5
[ Back to top ]