
Fターム[5J083FA10]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 関連技術(計測装置以外) (23) | その他 (10)
Fターム[5J083FA10]に分類される特許
1 - 10 / 10
水中航走体の位置較正方法
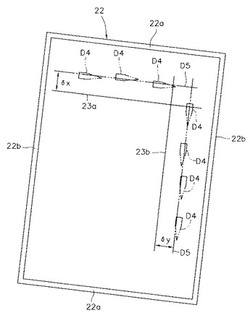
【課題】狭い領域で運用する水中航走体についても、精度よく較正できるようにする。
【解決手段】水槽22内で運用される水中航走体について、水槽22の短辺22aと長辺22bに平行に沿わせて位置検出用経路23aと23bを長く設定する。水中航走体を自身で検出する慣性航法位置を基に各位置検出用経路23aと23bに沿って航走させるときに、支援船側より音響測位を複数回行う。上記各位置検出用経路23aと23bごとに、得られる音響測位位置D4と、慣性航法位置について、それぞれ直交する方向の代表値を求め、求められた両代表値の差として、各位置検出用経路23a,23bに直交する方向に関する慣性航法位置の偏差δxとδyをそれぞれ求め、この偏差δx,δyにより水中航走体が自身で測位する慣性航法位置を較正させる。
(もっと読む)
水中航走体の位置較正方法

【課題】 音響通信が不安定でも位置較正を実施できるようにする。
【解決手段】 水中航走体を、慣性航法位置に累積誤差がなくて精度が高い状態のときに、緯度方向と経度方向の各アップデート用経路22,23に沿って航走させながら、支援船側より音響測位を行い、得られた音響測位位置24aの緯度成分の代表値を緯度方向基準値25、音響測位位置24bの経度成分の代表値を経度方向基準値26とする。その後、慣性航法位置に誤差が累積した水中航走体を、緯度方向と経度方向の各位置アップデート用経路22,23に沿って再び航走させ、この際、支援船側からの音響測位で得られる音響測位位置27aの緯度方向の代表値28、及び、音響測位位置27bの経度方向の代表値29を、緯度方向と経度方向の各基準値25,26と比較して緯度方向と経度方向の偏差δx、δyを求める。この偏差δx,δyにより水中航走体の慣性航法位置を較正させる。
(もっと読む)
平面進行波音場生成装置、この装置を用いた音響センサ試験装置及び指向性スピーカ
【課題】音響管を用いて、ほぼ理想的な平面進行波音場、好ましくは1次元平面進行波音場を生成する装置を提供する。
【解決手段】1次元平面進行波音場生成装置100は、筒状の音響管1と、音源信号を発生する信号源4と、音響管1の一端に設け、信号源4から入力した音源信号に応じた音波を音響管1内に放射する第1のスピーカ2と、音響管1の他端に設け、信号源4から入力した音源信号に応じた音波を音響管1内に放射する第2のスピーカ3と、第1のスピーカ2から放射された音波が第2のスピーカ3に到達する時間だけ遅延させて、信号源4からの音源信号を第2のスピーカ3に入力させる遅延回路6と、遅延された音源信号の周波数により振幅と位相を微調整する振幅・位相微調整回路7とを備え、音響管1内の軸線に対して垂直な横方向の寸法を、音響管1内に放射される音波の波長より小さく設定したものである。
(もっと読む)
水中航走体の位置較正方法及び装置
【課題】 音響通信の速度が限られていても精度よく較正できるようにする。
【解決手段】 水中航走体6を、緯度方向位置検出用経路22と経度方向位置検出用経路23に沿って航走させながら、支援船7側より音響測位を行う。得られた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yのみを、音響通信を介して水中航走体6の水中航走体制御装置15へ与える。水中航走体制御装置15では、緯度方向と経度方向の各位置検出用経路22,23を航走したときに水中航走体6が自身で計測していた慣性航法位置d4の緯度成分と経度成分の代表値d5x、d5yを求め、これを支援船7側より与えられた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yより減算して緯度方向と経度方向の偏差δx,δyを求め、この緯度方向と経度方向の偏差δx,δyにより水中航走体6が自身で計測していた慣性航法位置d4を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 慣性航法位置の較正に要する音響測位回数及び水中航走体のエネルギー消費を低減させ、音響測位精度を向上させる。
【解決手段】 水中航走体6を、定点保持又は着底により海底21に対する相対位置変化を停止させる。この状態で、支援船7側からの音響測位を複数回行い、各計測結果における緯度方向の平均と経度方向の平均を求めて、水中航走体6の統計的に正しい緯度と経度を備えた音響測位位置を求める。又、水中航走体6自身による慣性航法に基づく測位を行い、その緯度及び経度について、音響測位位置の緯度及び経度と比較して、緯度方向と経度方向の偏差をそれぞれ求め、求められた緯度方向及び経度方向の偏差により、水中航走体6自身による慣性航法に基づく緯度と経度のデータを較正させる。更に、音響測位時に支援船7を水底付近に停止させた水中航走体6の鉛直線上付近に保持することで音響測位精度を向上させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 音響測位可能な領域が小さくても精度よく位置較正できるようにする。
【解決手段】 音響測位実施可能領域23に、円周状位置検出用経路24を設定する。水中航走体6を、自身で計測する慣性航法位置25に基づいて円周状位置検出用経路24に沿って航走させながら、支援船側より音響測位を行う。次いで、水中航走体6が最も東寄りに位置するときの音響測位位置26の経度成分の代表値27と、慣性航法位置25の経度成分の代表値29から経度方向に関する偏差δxを求め、水中航走体6が最も南寄りに位置するときの音響測位位置26の緯度成分の代表値28と、慣性航法位置25の緯度成分の代表値30から緯度方向の偏差δyを求める。その後、各偏差δx,δyにより水中航走体6が自身で測位する慣性航法位置25を較正させる。
(もっと読む)
距離測定装置
【課題】超音波を利用し2点間の距離計測をするセンサユニットにおいて、その周囲に反射物が存在しても、その影響を低減し安定な距離計測を可能にする。
【解決手段】センサユニットは水平面の全方位へ向けて超音波信号を発信する全方位超音波発信器100と、水平面の特定の方位より到来する超音波信号を受信する超音波受信器101〜106を備える。反射物検出モードでは、全方位超音波発信器100より超音波信号を発信させ、所定時間内に該超音波信号が超音波受信器101〜106の1つ以上で受信された場合に、それら超音波受信器による受信信号レベルに基づいて反射物の存在する方向を求め、該方向に対応した一部の超音波受信器の受信感度をそれ以外の超音波受信器の受信感度より下げる制御を行う。
(もっと読む)
目標運動解析装置、目標運動解析方法プログラムおよび目標運動解析方法
【課題】目標体の運動モデルを等速直進運動とすると、目標体が変針変速することにより、変針変速前後の目標の運動を正しく解析できないという問題があった。
【解決手段】本発明の目標運動解析方法は、目標体の変針変速を検出した上で、時系列観測データを用いて変針変速時刻を推定し、さらに時系列観測データを用いて、基準時刻における目標体位置座標および、推定した変針変速時刻前後の等速直進区間毎の目標体の針路、速力を推定パラメータとする非線形最適化問題を解くことである。
(もっと読む)
目標運動解析プログラム、目標運動解析装置および目標運動解析方法
【課題】観測体の変針時の速力センサ誤差やジャイロセンサの誤差に起因する観測方位のバイアス誤差が存在する。
【解決手段】目標体から放射される音波の到来方位を音響センサにより時系列的に観測した時系列観測方位データを用いて、観測体の、観測時刻、目標体に対する観測方位、位置座標東西成分、位置座標南北成分、速力東西成分、および速力南北成分を入力し、時系列観測方位データに対してバイアス誤差成分に関するインデックスを設定し、これらに基づいて、バイアス誤差成分および目標体の運動ベクトルを推定する。
(もっと読む)
送信モードリコメンドシステム、ソーナーシステム、送信モードリコメンド方法、そのプログラム及び記録媒体
【課題】広帯域の送信音波に対する探知距離、探知領域、目標存在圏のカバー率を短時間で算出し、かつ、残響レベルを実際の観測結果を利用して計算し、精度良く最適な送信モードを短時間でリコメンドするシステムを提供する。
【解決手段】テスト音波としてインパルス送信部1からインパルスを水中に送信し、受波器2で受信した受信信号からインパルス応答解析部13でインパルス応答を取得し、評価送信モード設定部11で設定した複数の評価送信モードの送信音波それぞれとインパルス応答とをたたみ込み積分計算部14で演算して、評価送信モードそれぞれにおける残響レベル、雑音レベルを求め、エコーレベル計算部16で算出した当該評価送信モード時のエコーレベルとシグナルエクセス計算部17で比較した結果に基づいて、探知距離及び/又は探知領域及び/又は目標存在圏のカバー率を算出することにより最適な送信モードを選択して表示部18に表示する。
(もっと読む)
1 - 10 / 10
[ Back to top ]