
Fターム[5J084BB03]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | レンズ (825) | ズームレンズ (24)
Fターム[5J084BB03]に分類される特許
1 - 20 / 24
監視装置
【課題】アイセーフ光を用いた監視を実現することのできる監視装置を提供することを目的とする。
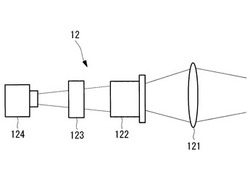
【解決手段】1400nm以上の波長帯域のレーザ光を射出する送光部と、送光部から射出されたレーザ光が物体に到達し、物体により反射された反射光を受光し、画像信号に変換して出力する撮像部12と、撮像部12からの画像信号を用いて監視画像を作成する画像処理装置とを備え、撮像部12は、入射光を増幅する増幅機能とシャッタ機能とを備えたイメージインテンシファイア123と、イメージインテンシファイア123よりも光の入射側に配置され、イメージインテンシファイア123の適用可能な波長範囲に反射光の波長を変換する波長変換デバイス122と、イメージインテンシファイア123を通過した光を受光するカメラ124とを備える監視装置を提供する。
(もっと読む)
距離測定装置及び飛翔体位置測定装置

【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 レーザー距離計10の接眼レンズ11にリレーレンズ20を介してビデオカメラ30を装着した構成であり、レーザー距離計10の接眼レンズ11に表示される飛翔体の画像をビデオカメラ30のモニタ画面31に表示させることができる。従って、観測者は、レーザー距離計10の接眼レンズ11をのぞき込み、アイポイント位置を保ちながらレーザーを照射する必要はなく、ビデオカメラ30のモニタ画面31を見ながら、レーザー距離計10を操作して飛翔体を追尾でき、飛翔体を追尾しながらのレーザー照射作業が容易となる。
(もっと読む)
追跡方法、および、レーザートラッカを有する測定システム
反射器(17)が設けられた標的(9)が、レーザートラッカ(10)を含む測定システムにおいて追跡される。反射器(17)は、通常追跡モードにおいて追跡ユニット(11)により追跡され、特別追跡モードにおいて概観装置(13)により追跡される。追跡ユニット(11)の検出領域と概観装置(13)の検出領域との間にある検出領域を有する捕捉ユニット(12)も存在する。標的(9)を追跡ユニット(11)によっては検出できないが、捕捉ユニット(12)により検出可能である場合、追跡ユニット(11)の方向は、捕捉ユニット(12)による測定に従って制御される。そして、標的(9)を追跡ユニット(11)によっては検出可能である場合、通常追跡モードへの遷移が開始される。標的(9)を概観装置(13)のみにより検出可能である場合、追跡ユニット(11)の方向は、概観装置(13)の測定に従って制御される。  (もっと読む)
(もっと読む)
監視装置及び監視方法
【課題】所望の探索範囲を効率よく監視すること。
【解決手段】上空を飛行する機体に搭載され、上空から海上の様子を監視する監視装置であって、光源を備え、上空から海上の探索領域に向けて、複数のスリット状の光を照射する送光部11と、海上の物体により反射された複数の反射光を受光する受光部12と、受光部12により取得された反射光の情報から、光を反射した海上の物体が対象物か否かを判定する処理装置27とを具備する。
(もっと読む)
海上監視・捜索方法
【課題】捜索海面における海域の状況を迅速に把握し、対象物を効率良く監視又は捜索することができる海上監視・捜索方法を提供する。
【解決手段】高速で飛行する航空機(固定翼、回転翼)21に搭載したレーザレーダ22から対象物11が存在すると思われる捜索海域10に対して、所定の比率の矩形状のレーザ光23を照射し、捜索海域10における一回に取得する撮像領域(レーザ照射エリア)24の撮像情報を取得し、この撮像上方から捜索海域10の波の情報を取得し、前記取得した捜索海域10の波の情報から、前記レーザレーダの捜索俯角(θ)を決定し、対象物11を捜索する。
(もっと読む)
3次元情報検出装置
【課題】1台のカメラで同時に撮像した被写体の2次元画像群を基にして被写体の3次元情報を検出することを図る。
【解決手段】空間的又は時間的に強度変調された強度変調光を発生する距離検出用光源部10と、被写体で強度変調光が反射された反射光を透過する複数のレンズ15が多眼的に配置されたレンズアレイ14と、複数のレンズ15の各々を透過した透過光を2次元撮像素子の結像面で各々結像させて、複数のレンズ15の各々に対応する被写体画像群を撮像し、該被写体画像群に基づいて被写体の3次元情報を検出する3次元カメラ16と、を備える。
(もっと読む)
航空機搭載用光学式遠隔気流計測装置
【課題】計測領域の拡大を実現しながら、同時に遠方領域における計測精度の劣化、距離分解能の低下および計測データ更新周期の長時間化を防止する光学式遠隔気流計測装置を提供する。
【解決手段】受信信号を時分割した各レンジビン長を計測距離に応じて長くし、且つ、一のレンジビンを隣接する他のレンジビンに部分的に重複させながら前記受信信号のデータ処理を行う。また、目的とする計測領域における、受信信号強度が事前に設定した閾値よりも大きい場合は、焦点距離を長くして計測レンジを拡大する。あるいは、受信信号強度が閾値よりも小さい場合は、焦点距離を短くして計測レンジを拡大する。
(もっと読む)
撮像システム
【課題】ノイズを抑制しながら、十分な明るさの画像を得ること。
【解決手段】パルス状の光を射出する送光部11と、受光部12と、受光部12から出力される画像信号をフレーム期間に渡って蓄積し、蓄積した複数の画像信号を重畳した重畳信号を出力する画像処理装置25と、前記重畳信号を画像として表示する表示装置4と、カメラヘッド123のゲイン及び送光部11から射出されるレーザ光のパルス周波数を予め設定されているそれぞれの許容範囲内で調整することで、表示装置4に表示された画像の明るさを調整する制御装置3とを具備する撮像システムを提供する。
(もっと読む)
移動体位置測定装置、移動体位置測定方法、及び移動体位置測定プログラム
【課題】複数の装置を組み合わせて用いることなく、光学系による測定方法を工夫することにより飛翔体の位置測定精度を高めることができるようにする。
【解決手段】レーザ部1が2つの連続するレーザパルスを生成して発射すると、送信光学部2が送信レーザパルスP1を所定の時間間隔Δtでターゲット10へ送信する。受信光学部3が、ターゲット10で反射した受信レーザパルスP2を集光すると、多チャンネンル光検出部4が、受信レーザパルスP2を入射方向に対応するチャンネルごとに検出し、多チャンネル測距部5が送信レーザパルスP1の送信時刻と受信レーザパルスP2の受信時刻との時間差を測定する。そして、制御部8が、多チャンネル測距部5の測定した時間差によってターゲット10までの距離を算出すると共に、多チャンネンル光検出部4で検出されたチャンネルの位置からターゲット10の移動方向を算出する。
(もっと読む)
監視装置
【課題】測距装置を併設することなく、監視を続けながら測距を行うことの可能な監視装置を提供することを目的とする。
【解決手段】送光部11から射出されたレーザ光が物体に到達し、物体により反射された反射光が到達するタイミングに合わせてシャッタを開閉させる監視制御を行うとともに、該監視制御を行っている期間中に、物体の距離情報を取得するタイミングでシャッタを開閉させる測距制御を行う監視装置を提供する。
(もっと読む)
レーザ距離測定機を用いた保安システムおよびレーザ距離測定機を用いた侵入者検出方法
【課題】侵入者の存在有無および侵入者の位置を正確に把握することができるレーザ距離測定機を用いた保安システムおよびレーザ距離測定機を用いた侵入者検出方法が開示される。
【解決手段】レーザ距離測定機を用いた保安システムは、レーザ光を放出して反射して戻ってきたレーザ光を受信して目標物との距離を測定し、侵入者の存在有無および侵入者の位置を検出するレーザ距離測定機と、放出されたレーザ光をレーザ距離測定機に反射する少なくとも1つの反射手段とを備え、少なくとも1つの反射手段は、レーザ距離測定機から所定の距離離隔した位置でレーザ距離測定機の誤差距離だけ離隔して設置されることを特徴とする。したがって、レーザ距離測定機の誤差距離を考慮して反射手段を設置することで、侵入者の存在有無および侵入者の位置を正確に把握することができる。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】高いフレームレートにて距離画像を生成できるようにする。
【解決手段】測距光照射部3が所定周期にて強度変調された測距光を被写体に照射し、複数の受光素子が配列されたCCD13が測距光の反射光を受光し受光光量に応じた信号を出力する。この際測距光の変調周期における互いに異なる複数の位相の数に対応する数の受光素子からなる受光素子単位を設定し、第1の基準変調周期において受光素子単位に含まれる受光素子により複数の位相の反射光を受光し、複数の位相数に対応する数の第1の基準変調周期からなる第2の基準変調周期において、各受光素子により受光される反射光の位相を順次切り替えて、各受光素子により複数の位相のすべての反射光を受光して、複数の位相のすべての受光信号を取得する。第1の距離画像生成部31が受光素子単位毎に第1の距離画像S1を生成し、第2の距離画像生成部32が受光素子毎に第2の距離画像S2を生成する。
(もっと読む)
ファイル生成装置および方法、ファイル表示装置および方法並びにプログラム
【課題】距離画像を表示する際に、距離画像に関連する輝度画像あるいは高解像度の距離画像の存在の有無を容易に確認できるようにする。
【解決手段】第1の距離画像生成部31が、被写体までの距離を表す第1の距離画像S1を生成する。第2の距離画像生成部32が、第1の距離画像S1よりも高解像度の第2の距離画像S2を所定条件下において生成する。ファイル生成部24が、第1の距離画像S1および第2の距離画像S2から1つの画像ファイルF0を生成するに際し、第2の距離画像S2の有無を表す付帯情報を付与して画像ファイルF0を生成する。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】TOF方式により測距を行うための撮像手段と、ステレオマッチングにより測距を行う撮像手段を備えた立体撮像装置において、被写体への測距光の照射を制限できるようにする。
【解決手段】第1の距離画像生成部30において、第1の撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。第2および第3の撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。この際、第1の撮像部2Aによる撮像前に第2および第3の撮像部2B,2Cにより撮像を行い、顔検出部39がこれにより取得した画像から顔等の所定被写体を検出する。所定被写体が検出された場合には、第2および第3の撮像部にのみ撮像を行わせ、第2の距離画像生成部32にのみ距離画像D2を生成させる。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】ステレオマッチングによる距離画像を精度良く生成する。
【解決手段】第1の距離画像生成部30において、撮像部2Aが取得した距離画像用のデータから第1の距離画像D1を生成する。撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が第2の距離画像D2を生成する。画素値変更部40が、第1の距離画像D1および第2の距離画像における対応する画素の画素値の差分値を算出し、差分値がしきい値を超える第2の距離画像D2における画素を誤対応画素として検出し、誤対応画素の画素値を所定の画素値に変更する。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】ステレオマッチングにより距離画像を生成する際に、立体撮像装置から被写体までの距離が大きくても、距離画像を精度良く生成する。
【解決手段】第1の距離画像生成部30において、撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。基線長変更手段38が、第1の距離画像に基づいて被写体までの距離である被写体距離を算出し、被写体距離が大きいほど撮像部2B,2C間の距離である基線長を大きくするよう変更する。基線長の変更後、撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】隠れ点を考慮して簡易に精度良くマッピング画像を取得できるようにする。
【解決手段】同期制御部20により距離画像を取得するための撮像部2Aおよび撮像部2Bの駆動を同期させて距離画像および2次元画像を取得する。対応関係算出部30により、距離画像上における画素と、2次元画像上における画素との対応関係を算出する。この際、隠れ点検出部31において、撮像部2Aからは臨むことができるが撮像部2Bからは臨むことができない被写体上の隠れ点を距離画像および2次元画像上において検出する。マッピング部32により、対応関係に基づいて、隠れ点を視認可能に2次元画像を距離画像にマッピングしてマッピング画像を生成する。
(もっと読む)
撮像装置、立体画像再生装置及び立体画像再生プログラム
【課題】撮影後に多視点画像を立体表示する場合においても、編集を容易に行うことができる多視点画像を撮影することができる。
【解決手段】複数の撮像手段により多視点画像を撮影し、多視点画像を立体表示するときの基準となる面である基準面の距離を取得し、全撮影範囲内の被写体の距離を所定の画素単位で測距してなる距離画像を取得し、多視点画像と、基準面の距離を示す情報と、距離画像とを関連付けて記録する。これにより、撮影された被写体像内の基準面上の領域を識別する表示をすることができる。なお、撮影、記録後に、基準面を示す情報と距離画像とに基づいて、多視点画像内の基準面上にある被写体の領域を抽出し、抽出した領域にマーキングデータを合成することで、変更後の基準面の領域を識別可能に表示しながら、基準面の距離を変更することもできる。
(もっと読む)
撮影装置および方法並びにプログラム
【課題】TOF方式において測距を行う場合に、正確に測距を行うことができるようにする。
【解決手段】光学的距離算出部52が、被写体に光を照射し、光の被写体による反射光を撮像系20により検出し、光が出射されてからその反射光が撮像系20により検出されるまでの時間に基づいて被写体の光学的な被写体距離を算出する。この光学的な被写体距離を算出するに際し、発光部41A,41Bから波長が異なる複数の光を被写体に照射する。そして、撮像系20が複数の光の被写体による反射光を異なる波長毎に受光する。強度取得部50が、受光した反射光の強度を取得する。
(もっと読む)
レーザーレンジセンサシステムの光学アダプタおよび方法
レンズを通す(TTL)方式のレーザーレンジセンサプローブ用のアダプタおよび方法は、所定の射出瞳寸法のTTLプローブを、共用の対物レンズ(この対物レンズの入射瞳寸法は、TTLプローブの射出瞳寸法とは異なる)と共に使用することを可能にする。
ガリレオ式構造のアダプタは、第一レンズと第二の解像レンズ等の光学系を含み、TTLレーザー光を拡大または縮小する。拡大か縮小かは、第一レンズが焦点距離が負の発散レンズであるか焦点距離が正の収束レンズであるか、第二レンズが収束レンズであるかまたは発散レンズであるかによって決まる。
本発明の実施例はケプラー式構造も提供しており、平行化されていない放射光に用いることができる。また、アダプタをよりコンパクトにするために鏡を含んでいてもよい。さらに、第一、第二レンズの間に少なくとも1つの調節可能なレンズ要素を含む実施例も加えられている。この少なくとも1つの調節可能レンズ要素は、光路に沿って移動できるよう、アクチュエータに接続されている。このアダプタは、鏡を用いて、よりコンパクトな「折り畳み」構造にすることも可能である。  (もっと読む)
(もっと読む)
1 - 20 / 24
[ Back to top ]