
Fターム[5J084CA13]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | モニターに関するもの (19)
Fターム[5J084CA13]の下位に属するFターム
Fターム[5J084CA13]に分類される特許
1 - 6 / 6
障害物検出方法及び障害物検出装置
【課題】レーザ光の照射効率を向上させるとともに、垂直方向の分解能を向上させることができる障害物検出方法及び障害物検出装置を提供する。
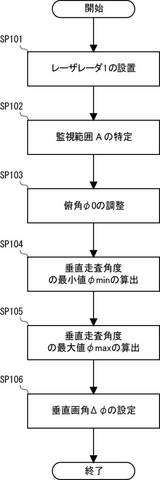
【解決手段】レーザ光を投受光するレーザレーダ1を設置する設置工程(SP101)と、監視範囲Aに向かってレーザ光を照射して監視範囲Aの位置を特定する監視範囲位置特定工程(SP102)と、レーザレーダ1の俯角φ0を調整する俯角調整工程(SP103)と、監視範囲Aにおける垂直走査角度の最小値φminを算出する最小値算出工程(SP104)と、監視範囲Aにおける垂直走査角度の最大値φmaxを算出する最大値算出工程(SP105)と、垂直走査角度の最小値φmin及び最大値φmaxに基づいてレーザレーダ1の垂直画角Δφを設定する垂直画角設定工程(SP106)と、を有し、垂直画角Δφの範囲内でレーザ光を垂直方向に走査させて障害物Tを検出する。
(もっと読む)
レーザ距離測定装置

【課題】少なくともレーザレーダヘッド内に配置された信号処理部の故障を把握することができるレーザ距離測定装置を提供する。
【解決手段】レーザ光Lを投光する投光部1と、反射光Rを受光して受光信号Srを発信する受光部2と、物体の測定距離を含む計測データDを作成して発信する信号処理部3と、レーザ光Lを受光部2に伝達する光ファイバ4と、これらを収容するレーザレーダヘッド5と、レーザレーダヘッド5と離隔して配置されるとともに計測データDを受信して測定結果を出力する制御装置6と、を有し、制御装置6は、光ファイバ4の測定距離Fと光ファイバ4の長さに相当する初期値Fiとを比較して測定距離誤差ΔFを算出し、測定距離誤差ΔFが所定の閾値αを超えた場合に故障信号を発信する。
(もっと読む)
光検出装置、光検出方法および車両
【課題】背景光の光量レベルが高い環境または被検物からの光が弱い環境下でも、被検物からの光を高精度に検出する。
【解決手段】所定周波数で点灯消灯するパルス光を被検物に照射し、パルス光が照射される被検物を含む領域を撮像する。所定周波数の1以上の整数倍の複数の周波数の信号を含む複数の参照信号を生成し、生成された複数の参照信号を用いて、撮像信号を同期検波する。同期検波された複数の検波信号を加算し、加算した同期検波信号に基づいて、ノイズ成分を除去した計測信号を出力する。
(もっと読む)
距離・速度計および距離・速度計測方法
【課題】自己結合型のレーザ計測器の利点を活かしつつ、測定対象との距離と測定対象の速度を計測する。
【解決手段】距離・速度計は、半導体レーザ1と、半導体レーザ1に、発振波長が連続的に増加する第1の発振期間と発振波長が連続的に減少する第2の発振期間とを交互に繰り返させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と測定対象12からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出する検出手段と、検出手段の出力に含まれる干渉波形の数を、第1の発振期間と第2の発振期間の各々について数える計数手段6〜8と、半導体レーザ1の最小発振波長と最大発振波長と計数手段の計数結果から測定対象12との距離及び測定対象12の速度を算出する演算手段9とを有する。
(もっと読む)
走査式測距装置
【課題】簡単な構成の基準機構を走査部に設けることにより、安価で且つ高精度な測距を実現し得る走査式測距装置を提供する。
【解決手段】測定光を出力する投光部3と、前記測定光を測定対象空間に向けて走査する走査部4と、前記測定対象空間に存在する測定対象物からの反射光を検出する受光部5を備え、前記反射光に基づいて前記測定対象物までの距離を測定する走査式測距装置であって、前記走査部4は、前記測定光を前記測定対象空間に伝播させ且つ前記反射光を前記受光部5に導く反射部材9と、前記反射部材9を所定回転軸心で回転させる回転機構を備え、前記回転軸心と前記測定光の光軸とが平行となるように前記投光部3と前記走査部4が配置され、前記走査部4の特定回転位置で前記測定光の一部が基準光として前記受光部5に導かれるように構成される。
(もっと読む)
移動再帰反射器を測定する絶対距離計
増分干渉計を使用することなく、移動外部再帰反射器またはそのほかの移動目標表面の1またはそれを超える次元の絶対距離測定および/または表面走査および/または座標測定が可能なレーザ・デバイスおよび方法。  (もっと読む)
(もっと読む)
1 - 6 / 6
[ Back to top ]