
Fターム[5L096EA12]の内容
Fターム[5L096EA12]に分類される特許
21 - 40 / 73
移動体検出装置、移動体検出方法及びプログラム
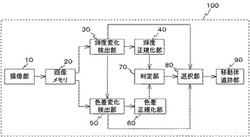
【課題】周囲の明るさに関係なく、移動体像を高精度に検出する。
【解決手段】撮像部10は、1フレームのRGB信号をフレーム周期で画像メモリ20に格納する。輝度変化検出部30は、輝度の時間変化量を検出する。輝度正規化部40は、検出された輝度の時間変化量を正規化する。色差変化検出部50は、RGB信号における色差の時間変化量を検出する。色差正規化部60は、検出色差の時間変化量を正規化する。判定部70は、正規化された輝度の時間変化量と色差の時間変化量との大小を判定する。選択部80は、大きい方の時間変化量を、移動体像を抽出するための情報として選択する。
(もっと読む)
画像処理装置及び方法、プログラム、記憶媒体

【課題】 顔特徴部位の検出精度を向上させる。
【解決手段】 顔に関する参照データを設定する設定モードと該参照データを用いて顔に対する判定を行う判定モードとにおいて、顔の特徴部位の検出に用いるパラメータを、それぞれ設定する検出パラメータ設定部105と、顔の特徴部位の位置をそれぞれのモードで設定されたパラメータを用いて検出する顔特徴部位位置検出部104と、それぞれのモードで検出された前記特徴部位の位置に基づいて特徴量を算出する特徴量算出部110と、設定モードで算出された特徴量に基づいて参照データを設定する参照データ設定部113と、判定モードで算出された特徴量と参照データとを用いて、顔に対する判定を行う表情判定部112とを備える。
(もっと読む)
目の位置の検出方法
【課題】動画像から目の位置を簡便に信頼性高く自動的に検出する。
【解決手段】動画像からの目の位置の検出方法が、A(A1)動画像のフレーム(元画像)から交差する2方向にぼかしたぼかし画像(水平・垂直ぼかし画像24)を作成し、そのぼかし方向のエッジの交点の位置を求めると共に、(A2)元画像の階調をつぶした顔領域検出用画像を作成し、(A3)顔領域検出用画像において、ぼかし方向のエッジの交点を一つの頂点とする矩形領域から顔領域候補を検出する工程、B(B1)顔領域候補ごとに、明度が変化した複数の目の位置検出用画像を作成し、(B2)目の位置検出用画像が高明度でフェードアウトした状態から低明度へフェードインするのに伴い、その画像に漸次現れる画素の固まり領域を検出し、(B3)検出した画素の固まり領域のうち対となって現れたものを目の位置候補として選択し、(B4)目の位置候補をその出現度数に基づいて目の位置として特定する工程からなる。
(もっと読む)
学習モデル生成装置及びプログラム並びに対象物検出装置及びプログラム
【課題】画像内の対象物の大きさにかかわらず、対象物を高精度に検出する。
【解決手段】学習モデル生成装置は、対象物を含む複数の学習用画像に対して、当該学習用画像内の対象物の大きさに応じて輪郭部分の階調差が異なるような前処理を行う学習用前処理部11と、前処理された各学習用画像に基づいて、前記対象物の特徴を示す学習モデルを生成する学習部12と、を備えている。
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
【課題】
本発明は、二次元的に配列された画素で表現された画像から特定種類のオブジェクト、例えば人間の頭部や人間の顔などを検出するオブジェクト検出方法等に関し、検出対象のオブジェクトが画像上に様々な寸法で写し出される場合であっても、そのオブジェクトを高速に検出する。
【解決手段】
オブジェクト検出対象の原画像を構成する画素を所定比率で間引くことにより、又は所定比率で段階的に間引くことより、原画像と一枚以上の間引画像とからなる画像群を生成する画像群生成ステップS21と、
相対的に小さい画像に相対的に狭い領域に作用するフィルタを作用させる抽出過程から相対的に大きい画像に相対的に広い領域に作用するフィルタを作用させる抽出過程に向けて順次に繰り返すことにより、原画像中から特定種類のオブジェクトを検出する段階的検出ステップS24とを有する。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記憶媒体
【課題】明るさが変化した場合等においても、精度よく被写体を検出することを目的とする。
【解決手段】撮像手段で撮像された画像より顔領域を検出する顔領域検出手段と、顔領域検出手段で検出された顔領域に係る情報に基づいて、前記画像の画素値を調整する調整手段と、調整手段で調整された前記画像より人物領域を検出する人物領域検出手段と、顔領域検出手段で検出された顔領域と、前記人物領域検出手段で検出された人物領域と、を統合する統合手段と、を有することによって課題を解決する。
(もっと読む)
画質検査装置および画質検査方法
【課題】二次元画像の画質を適切に検査できる画質検査装置を提供する。
【解決手段】 CCDカメラ1から出力される画像データは、画質検査装置2に入力される。画質検査装置2は、検査対象となる二次元画像の検査領域に対して、窓関数を用いて検査領域の境界における不連続性の影響を抑制するような補正を行う補正手段21と、補正手段21により補正された後の画像について、視覚の感度の周波数特性と、検査対象となる二次元画像の周波数成分とを積算することで欠陥強度を算出する欠陥強度算出手段22と、欠陥強度算出手段22により算出された欠陥強度に基づいて上記二次元画像の画質を判定する判定手段23と、を備える。
(もっと読む)
両眼の検出および追跡する方法、及び装置
少なくとも1つの顔の中の両眼の3D座標を検出し、その後追跡する方法において、少なくとも1つの画像センサの少なくとも1つのデジタルビデオ信号のシーケンスを含む画像データを受信するステップと、画像データにおいて眼を検出するか又はすでに検出されている眼を追跡するステップと、検出された眼又は追跡される眼の3D座標を確認するステップと、検出された眼又は追跡される眼を両眼と関連付けるステップと、両眼の3D座標を提供するステップとが提案される。前記画像データにおいて眼を検出することは、画像データにおいて1つ以上の顔を認識するステップと、少なくとも1つの認識された顔の3D座標を確認するステップと、認識された顔上に第1の探索域を確立するステップと、第1の探索域内で少なくとも一方の眼を検出するステップとを含む。前記画像データにおいて前に検出された眼を追跡することは、認識された顔上に第2の探索域を確立するステップと、第2の探索域内で両眼の眼を追跡するステップとを含む。 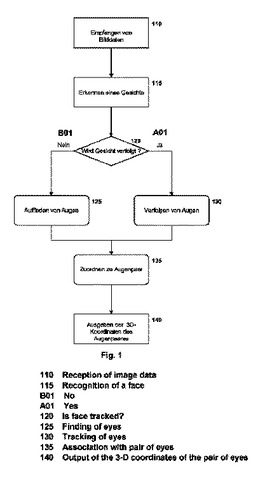 (もっと読む)
(もっと読む)
映像品質評価装置、映像品質評価方法及び映像品質評価プログラム
【課題】任意の映像に対して精度良く統一的な主観品質を推定する。
【解決手段】アライメント情報生成部(21)は、劣化していない映像信号である基準映像信号(RI)とその基準映像信号が劣化した劣化映像信号(PI)とを入力し、基準映像フレームと劣化映像フレームとの時間的なずれと空間的なずれとに関するアライメント情報を生成する。アライメント情報に基づいて空間的なずれと時間的なずれをなくした上で、空間特徴算出部(22)は、基準映像フレーム及び劣化映像フレームの映像状態を示す空間情報に基づいてそれぞれの空間特徴量を算出し、時間特徴量算出部(23)は、基準映像フレーム及び劣化映像フレームについて、それぞれのフレーム間での映像変化を示す時間情報に基づいてそれぞれの時間特徴量を算出する。主観品質推定部(24)は、空間特徴量及び時間特徴量に基づいて劣化映像信号の主観品質を推定する。
(もっと読む)
目の位置の検出方法
【課題】一画像中に複数の顔画像を含む元画像から目の位置を簡便な手法で自動的にする。
【解決手段】元画像からの目の位置の検出方法が、A(A1)元画像から交差する2方向にぼかしたぼかし画像を作成し、そのぼかし方向のエッジの交点の位置を求めると共に、(A2)元画像の階調をつぶした顔領域検出用画像を作成し、(A3)顔領域検出用画像において、ぼかし方向のエッジの交点を一つの頂点とする矩形領域から顔領域候補を検出する工程、B.(B1)顔領域候補ごとに、明度が変化した複数の目の位置検出用画像を作成し、(B2)目の位置検出用画像がフェードアウトした状態からフェードインするのに伴い、その画像に漸次現れる画素の固まり領域を検出し、(B3)検出した画素の固まり領域のうち対となって現れたものを目の位置候補として選択し、(B4)目の位置候補をその出現度数に基づいて目の位置として特定する工程からなる。
(もっと読む)
画像認識方法および装置
【課題】撮影環境や撮影機材の変動に対して耐性のある画像認証方法および装置を提供する。
【解決手段】参照顔画像Dの注目画素PijのLBPと、被参照顔画像Dkにおいて注目画素Pijに対応する位置の対応画素P'ijのLBPとが、対応するビットごとに比較され、値が一致するビットには「1」、不一致のビットには「0」が割り当てられ、一画素分のビット和が当該注目画素Pijの類似スコアとなる。すなわち、参照顔画像Dの注目画素PijのLBPが(10001011)、被参照顔画像Dkの対応画素P'ijのLBPが(00011010)であれば、MSBから第2,3,5,6,7番目の各ビット同士が一致するので、注目画素Pijの類似スコアは「5」となる。そして、これを参照顔画像Dの全画素に関して繰り返し、全画素のビット和の総和ΣCijが参照顔画像Dと被参照顔画像Dkとの類似スコアとなる。
(もっと読む)
レーンマーカ認識装置及びその方法、並びに車線逸脱防止装置
【課題】カメラが太陽光による逆光状態にある場合でも、適切なレーンマーカの位置を検出する。
【解決手段】車線逸脱防止装置は、レーンマーカを含めた自車両前方の撮像画像の輝度に基づいて、該撮像画像内のレーンマーカを検出する(ステップS31)。そして、車線逸脱防止装置は、太陽光からの逆光状態にあることを検出した場合(ステップS32〜ステップS33)、先に検出したレーンマーカの位置を補正する(ステップS34)。
(もっと読む)
露出判別装置およびその方法
【課題】画像の露出が適正であるか否かを適切に判別することができるようにする。
【解決手段】第1の評価値導出部が、画像データに基づいて、画像を複数に分割して得られる各ブロック毎に、そのブロックに属する各画素の輝度値から、そのブロックにおける基準最大輝度値をそれぞれ導き出し、それら導き出された各ブロック毎の基準最大輝度値から、画像についての第1の評価値を導き出す。露出判別部が、導き出された第1の評価値に基づいて、画像の露出が適正であるか否かを判別する。
(もっと読む)
移動検出装置及び方法
【課題】被写体の大きさに変化が生じても精度良く動きベクトルを検出することができる移動検出装置及び方法を提供する。
【解決手段】撮影時刻の異なる第1及び第2画像データに基づき、第1画像データ内の所定ブロックについて、最も相関の大きいマッチング領域を第2画像データ内から探索することにより、上記ブロックの動きベクトルを検出する。この際、第2画像内に前記ブロックと同一サイズの比較領域を異なる座標位置に順次に設定しながら、ブロック及び比較領域について、所定方向に隣接する同一画素値の画素群を統合することにより、画素値の変化パターンを所定方向に関して単純化し、この単純化された各変化パターンが上記ブロックと最も類似する比較領域を検出してマッチング領域として特定する。
(もっと読む)
瞼検出装置及びプログラム
【課題】少ない演算で正しい瞼を検出できる瞼検出装置を提供する。
【解決手段】カメラ10は対象者の顔を撮影し、コンピュータ14のCPU24はその動画像を取得し、画像メモリ22に格納する。CPU24は、画像メモリ22に格納された動画像の所定の領域から対象者の上瞼と下瞼との組み合わせの候補となるエッジラインを抽出する。CPU24は、抽出したエッジラインの内、上瞼の候補の重心が上下方向に移動し、下瞼の候補の重心が移動しないエッジラインを対象者の瞼と判別する。
(もっと読む)
画像認識装置、電子機器、画像認識方法及び画像認識プログラム
【課題】高速、かつ、精度良く画像に写った複雑なオブジェクトを認識可能にする。
【解決手段】オブジェクトの一例たる顔が写っている画像を入力する画像入力部10と、
前記画像の各画素を二値化し、前記画像を局所的方向寄与度特徴量を算出可能な程度まで
単純化する二値化・正規化部13と、前記二値化された画像の特徴量である前記局所的方
向寄与度特徴量を算出する方向寄与度特徴量算出部14と、前記局所的方向寄与度特徴量
に基づいて、前記画像に写っている顔を認識する認識部15とを備える構成とした。
(もっと読む)
画像処理装置
【課題】 本発明は、被写体の特徴検出から作成した特徴分布マップを参照し、部分領域を抽出してパターン照合を行うことで、高速かつ精度よく被写体パターンを検出することを目的とする。
【解決手段】 画像から所定の被写体パターンを検出する画像処理装置において、画像から前記被写体の部分的な特徴を抽出する部品候補抽出手段と、前記部品候補抽出手段で抽出した部品候補の位置を示す部品候補分布マップデータ作成手段と、前記部品候補分布マップ作成手段で作成した部品候補分布マップを参照し、前記部品候補抽出手段で抽出された複数の特徴の位置関係から前記被写体パターンと照合するための所定の部分領域を前記画像から抽出する照合パターン抽出手段と、前記照合パターン抽出手段で抽出された部分領域が前記被写体パターンであるかを判別するパターン判別手段とを備える。
(もっと読む)
画像処理装置
【課題】 高精度、かつ高速な被写体検出器を提供する。
【解決手段】 画像から所定の被写体パターンを検出する画像処理装置において、画像から前記被写体パターンと照合するための所定の部分領域を抽出する照合パターン抽出部と、前記照合パターン抽出部で抽出された部分領域が前記被写体パターンであるかを判別する前記被写体パターンの回転量に対応した複数の第1のパターン判別部と、前記第1のパターン判別部によって前記被写体パターンであると判別された前記部分領域の少なくとも回転量を正規化する画像特性正規化部と、前記画像特性正規化部の出力について前記被写体パターンであるかを判別する第2のパターン判別部を備えた画像処理装置において、前記第1のパターン判別部および第2のパターン判別部は前記被写体パターンから所定の複数の局所特徴量を算出し、前記複数の局所特徴量の判別結果を組み合わせて前記被写体パターンの判別を行うことを特徴とする。
(もっと読む)
動きベクトル検出装置
【課題】フレーム画像間の動きベクトルの検出を精度良く迅速に行える動きベクトル検出装置を提供する。
【解決手段】前フレームと現在のフレーム(後フレーム)とに関するフレーム画像間の動きベクトルを検出する動きベクトル検出装置では、まずフレーム画像を垂直方向に分割した複数の画像領域について垂直方向のエッジを強調した後に、垂直方向に射影をとって1水平ライン分の射影データを生成する。次に、この射影データと第1の閾値との交差点を探索し、各交差点を中心とした動きベクトル検出範囲に相当する現フレームの射影データを抽出する。そして、抽出された各射影データを上記の各交差点からの距離毎に加算し、この加算結果からフレーム画像の水平方向に関する動きベクトルを検出する。以上により、動きベクトルの検出を精度良く迅速に行えることとなる。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記憶媒体
【課題】 高精度かつ処理効率の良い被写体検出を実現する。
【解決手段】 照合パターンを異なる複数の解像度のパターンに変換し(S901)、前記複数の解像度のパターンの複数の局所領域における局所特徴量に基づいて領域毎の被写体信頼度を算出し(S904、905)、前記領域毎の被写体信頼度の和に基づいて前記照合パターンが特定の被写体か否かを判別する(S907〜909)。
(もっと読む)
21 - 40 / 73
[ Back to top ]