
Fターム[5L096EA17]の内容
イメージ分析 (61,341) | 前処理 (3,379) | 正規化 (765) | 位置の正規化(位置合わせ) (432) | パターンを順次移動させて一致を見る (64)
Fターム[5L096EA17]に分類される特許
1 - 20 / 64
画像検索装置、画像検索方法およびプログラム
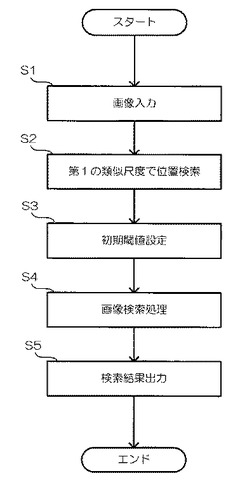
【課題】高速かつ高精度でテンプレート画像に類似する画像領域を検索することができる画像検索装置、画像検索方法およびプログラムを得る。
【解決手段】検索対象画像に対するテンプレート画像による検索位置を移動させつつ、各検索位置における検索対象画像とテンプレート画像との類似度を示す第1の類似度を算出する第1の算出手段と、第1の類似度のうち、類似度が高い方から順に所定の個数の第1の類似度について、前記所定の個数の第1の類似度それぞれが算出された検索位置を特定する特定手段(S2)と、検索位置に対して、第1の類似度より算出精度が高い第2の類似度を算出する第2の算出手段(S3)と、第2の類似度を閾値の初期値として、検索対象画像に対するテンプレート画像による検索を行う検索手段(S4)とを備えた。
(もっと読む)
類似画像領域検出方法、装置及びプログラム

【課題】検出対象とする画像領域を事前に指定することなく任意の画像領域を検出できるようにし、しかも当該任意の検出領域が画面内で移動した場合でも検出可能とする。
【解決手段】制御ユニット1の制御の下で、表示タイミングの異なる2枚の画像データを重ね合わせた状態で、その一方の画像データの位置座標を二次元方向(X軸、Y軸の各方向)に一定量シフトするごとに、当該画像データ間で画素ごとにそのRGB値の一致度数を計算してその全画素の合計を求め、この一致度数合計が最大値を示すときの画像データのシフト位置座標から一致画像領域を検出するようにしたものである。
(もっと読む)
探索省略領域設定関数生成方法、探索省略領域設定方法、オブジェクト探索方法、探索省略領域設定関数生成装置、探索省略領域設定装置、及びオブジェクト探索装置
【課題】オブジェクト探索の効率化を図ることが可能な探索省略領域設定関数生成方法を提供すること。
【解決手段】探索省略領域設定関数生成方法は、サイズ比の異なる各モデル縮小画像上の指定探索点に対して、オブジェクトを探索するためのテンプレートを対応付けて、各モデル縮小画像上の前記指定探索点と前記テンプレートとの指定探索点類似度を検出し、前記指定探索点類似度がオブジェクト検出判定閾値を超える場合、各モデル縮小画像上の前記指定探索点の周辺の複数の周辺探索点の夫々と、前記テンプレートとの周辺探索点類似度を検出し、前記周辺探索点類似度の分布に基づき前記オブジェクトと前記テンプレートとの相対位置を推定し、推定相対位置に基づき各モデル縮小画像上に前記オブジェクトの探索省略領域を設定するための関数を生成する。
(もっと読む)
移動量測定装置および方法
【課題】累積的な移動量および1回測定当たりの移動量の測定精度が共に良好な移動量測定装置。
【解決手段】画像を入力する手段と、入力画像を記憶する手段と、記憶された画像の一部をテンプレート画像として抜き出す手段と、入力画像とテンプレート画像との相関計算によりパターンマッチングをする手段と、パターンマッチングの結果を用いて被測定物の移動量を算出する手段と、を備え、移動量を算出する手段は、固定されたテンプレート画像を用いたパターンマッチングにより計算された移動量と、逐次更新されたテンプレート画像を用いたパターンマッチングにより計算された移動量とを比較し、移動量の差が一定値未満の場合は固定されたテンプレート画像に基づく移動量を選択し、移動量の差が一定値以上の場合は両方の移動量を用いて補正計算することによって、被測定物の移動量を算出する移動量測定装置。
(もっと読む)
情報処理装置および方法
【課題】 モデル座標系を基準とした位置姿勢の自由度のうち、特定自由度のパラメータを一意に定める特徴が不足するような物体においても、ロバストかつ高精度な位置姿勢計測を実現する。
【解決手段】 計測対象物体との位置姿勢合わせにより、当該計測対象物体の位置姿勢を取得するための三次元形状モデルを保持するモデル保持手段と、前記計測対象物体の画像を取得する画像取得手段と、前記三次元形状モデルの第一の幾何特徴と前記画像内の第一の幾何特徴とに基づき、第一の座標系において、前記三次元形状モデルの第一の位置姿勢を取得する第一の位置姿勢取得手段と、前記三次元形状モデルの第二の幾何特徴と前記画像内の第二の幾何特徴と前記第一の位置姿勢とに基づき、前記第一の座標系と異なる第二の座標系において、前記三次元形状モデルの第二の位置姿勢を取得する第二の位置姿勢取得手段と、を有することを特徴とする。
(もっと読む)
侵入物体の検知を行うことができる物体追尾装置、物体追尾方法及び記憶媒体
【課題】追尾対象体が追尾されている画像データの画像フレームに侵入物体が侵入したことを検出することのできる物体追尾装置を提供する。
【解決手段】追尾対象である被写体を追尾対象体として追尾する物体追尾装置は、動画像データにおける現フレームよりも前の前フレームにおいて追尾対象体の位置を示す前フレーム対象領域又は前記現フレームにおいて追尾対象体の位置を示す現フレーム対象領域に、複数のサブ領域を設定し、当該サブ領域毎にその特徴量を求める特徴量算出部104と、特徴量が第1の閾値を超えるサブ領域が存在し、かつその数が基準値に達していなければ、現フレームにおける追尾対象体が位置する領域に、追尾対象体と異なる侵入物体が侵入したと判定する侵入物判定部105とを有し、侵入物判定部105は追尾対象体の像領域に侵入物体が侵入したか否かを判定する。
(もっと読む)
画像識別装置、画像識別方法及びプログラム
【課題】画像内での特定画像領域の識別速度の高速化を図る。
【解決手段】画像表示装置100であって、画像から第1領域及び第2領域をそれぞれ生成する画像領域生成部3aと、第1領域の各々と識別用情報との類似度を評価値算出部3cにより算出させる第1算出制御部3dと、算出された類似度に基づいて、第2領域の各々のうち、識別用情報との類似度を評価値算出部により算出させる画像領域を指定する画像領域指定部3gと、指定された画像領域と識別用情報との類似度を評価値算出部により算出させる第2算出制御部3hと、第1算出制御部及び第2算出制御部のうちの少なくとも一方により算出された類似度に基づいて、画像内で特定画像領域を識別する顔識別部3iと、を備えている。
(もっと読む)
横断歩道検出装置、横断歩道検出システム,横断歩道検出方法及びプログラム
【課題】道路の状況にかかわらず、横断歩道を精度良く検出する。
【解決手段】メインパターンを用いたスキャン動作によって得られたデータに所定の演算処理を実行する。次に、この演算処理の演算結果と、メインパターンMPの所定の画像上の位置との関係を示す特性曲線を算出する。そして、特性曲線に現れるピークの規則性に基づいて、所定の画像に横断歩道が写っているか否を判断する。上述のデータは、メインパターンを構成するサブパターンそれぞれと重なる画素の輝度の平均である。このため、横断歩道を構成する白色パターンに亀裂が生じていたり、白色パターンに剥離が生じていたりしても、データの値は、ほとんど影響を受けない。したがって、所定の画像に横断歩道が写っているか否かを精度よく判断することができる。
(もっと読む)
オブジェクト検出方法及びオブジェクト検出装置
【課題】オブジェクト検出漏れの割合を急増させることなく、オブジェクトの誤検出を低減するための技術を提供する。
【解決手段】入力画像からオブジェクト判定の対象となる小領域を所定のずらし幅でずらしながら切り出していく第1処理と、上記入力画像における上記小領域毎の特徴量を算出する第2処理と、上記特徴量の算出結果に基づいて上記小領域毎にオブジェクトか非オブジェクトかを判別する第3処理とを含んでオブジェクト検出を行う。上記第3処理におけるオブジェクト判定の誤りを低減するための第1誤検出低減処理と、上記第1誤検出低減処理とは異なる方式により、上記第3処理におけるオブジェクト判定の誤りを低減するための第2誤検出低減処理とを、誤検出低減方式切り替え部(105)により、上記小領域を切り出す際のずらし幅に応じて選択的に実行させることでオブジェクト誤検出の低減を図る。
(もっと読む)
画像処理システム及びプログラム
【課題】被写体の位置や向きが変化しても、被写体に同じ座標系を設定する。
【解決手段】画像処理システム1は、被写体を撮像した撮像画像を取得し、取得される撮像画像において被写体が写し出された被写体撮像領域に外接する最小の矩形領域を設定し、設定された最小の矩形領域と被写体撮像領域との関係に基づいて、最小の矩形領域に基づく座標系を被写体に対して設定する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】対応点探索の演算負担を削減可能な画像処理装置等を提供する。
【解決手段】画像処理装置は、関心領域設定手段50と、前処理手段100と、対応点探索手段60とを含む。前処理手段100は、関心領域内の画像(前処理対象画像)G50を取得し、当該画像G50に基づいて対応点探索用の画像G100を設定する。前処理手段100は、指針値設定手段110と、画素値変換手段120とを含む。指針値設定手段110は、前処理手段100による処理内容を決定するための指針に関する指針値S110を、所定の指針値設定規則に従って設定する。画素値変換手段120は、前処理対象画像G50に含まれる画素の画素値を指針値S110に基づいて減少させる画素値変換を行い、当該画素値変換によって生成された画像G121またはG122またはG123を対応点探索用画像G100として出力する。
(もっと読む)
画像抽出装置、画像抽出方法および画像抽出プログラム
【課題】複数の画像から所望の画像を抽出する精度を向上させる。
【解決手段】画像抽出装置1は、候補画像検出部1aとシーン検出部1bと検出状況算出部1cと判定部1dと抽出部1eを有する。候補画像検出部1aは、時系列的に並ぶ複数の画像の特徴量を用いて、複数の画像の中から抽出候補となる抽出候補画像を検出する。シーン検出部1bは、画像の特徴量に基づいて、複数の画像のシーンの区切りを検出する。検出状況算出部1cは、シーンの区切りにより区切られた同一の区間に含まれる抽出候補画像の検出状況を算出する。判定部1dは、算出された検出状況に応じて、同一の区間に含まれる抽出候補画像を抽出対象画像として抽出するか否か判定する。抽出部1eは、抽出対象画像として抽出すると判定された抽出候補画像を抽出する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】より簡単な処理で画像データの色補正を良好に行なうことができる画像処理装置、画像処理方法及び画像処理プログラムを提供する。
【解決手段】候補領域検出部11でパターンマッチングにより画像データから検出した顔画像の候補領域から、色相彩度抽出部12により色相データ及び彩度データを抽出し、その抽出した色相データ及び彩度データを顔画像判定部13で予め定められた基準データと比較することにより、前記候補領域に一定基準を満たす顔画像が含まれるか否かを判定する。これにより、より簡単な処理で色補正に適した候補領域を正確に検出し、その候補領域のデータに基づいて画像データの色補正を良好に行なうことができる。
(もっと読む)
物体認識装置、物体認識方法及びプログラム
【課題】画像認識に必要な計算量及びメモリー容量を低減し、かつ一部が重なり合った複数の認識対象物体の検出処理を行うことが可能な画像認識装置を提供する。
【解決手段】本発明の物体認識装置は、登録画像の点対称変換された画像より抽出した複数の第1の特徴点、変換画像の基準点から第1の特徴点への変位ベクトルが記憶される特徴点データ記憶部と、入力画像の認識対象物体の特徴を構成する第2の特徴点を抽出する特徴点抽出部と、第2の特徴点を回転中心として、変位ベクトルを単位角度にて順次回転させ、第2の特徴点と変位ベクトルとから候補座標点を算出する候補座標点算出部と、候補座標点を複数の座標軸に投影し、投影軸座標点に対し、変位ベクトルの回転角に対応させて投票を行う候補座標点投票部と、座標軸における投票における積算値の最大値の軸座標を基準点とする認識対象物体判定部とを有する。
(もっと読む)
情報処理装置およびその制御方法
【課題】撮像装置または物体の位置及び姿勢の算出において、追跡処理を再び行うまでに要する時間を軽減するための技術を提供すること。
【解決手段】撮像装置で撮像された撮像画像を取得し、取得された撮像画像をフレーム毎に順番に記憶し、撮像画像で検出される直線と3次元空間モデルの直線とを対応させ、最も整合性の高い対応を得ることで撮像装置の位置姿勢を初期化し、複数の撮像画像の中から処理を行う撮像画像を選択し、初期化された前記撮像装置の位置姿勢を基準として、選択撮像画像の対象物体の位置姿勢の変化により撮像装置の位置姿勢の変化を計測し、計測された位置姿勢の変化の値が所定の閾値に入っていないと判定された場合、処理するフレームの撮像画像を用いて初期化を行う。
(もっと読む)
2次元図形マッチング方法
【課題】逐次性を有する高速な2次元図形マッチング方法を提供することを目的とする。
【解決手段】入力地図および参照地図に新たな点を挿入し(S102,S108)、入力地図および参照地図の局所特徴を抽出し(S104,S110)、抽出された参照地図の局所特徴を記憶し(S112)、抽出された入力地図内の局所特徴の一つをクエリとし、類似する参照地図内の局所特徴を検索し(S114)、検索結果から解候補としての仮説を含む仮説集合を生成し(S116)、仮説集合に含まれる各仮説の確からしさを評価する(S118)。この際、参照地図の局所特徴のLSH関数によるハッシュ値に対応するビンに記憶し(S112)、クエリに関する局所特徴のLSH関数によるハッシュ値に対応するビンを検索し(S114)、点と仮説との対である点仮説ペアを評価する順序を計画し(S118a)、最良の仮説を選出する(S118b)。
(もっと読む)
対応点探索方法、対応点探索装置および対応点探索プログラム
【課題】階層的な探索を行うことによって探索速度を向上するとともに、密な対応点を高精度に得ること。
【解決手段】対応点探索部が、類似度画像における注目画素と注目画素の周辺画素との距離が大きいほど周辺画素の画素値が小さくなるように補正したうえで、補正後の各画素値の中で最大の画素値を他の類似度画像における注目画素の画素値に対して順次累積加算し、対応点をサブピクセル単位で検出し、階層化処理部が、特定された対応点を用いた累積加算およびあらたな対応点の特定を、ブロックのサイズを減少させつつ複数の階層にわたって繰り返すように対応点探索装置を構成する。
(もっと読む)
顔特徴点検出装置及びプログラム
【課題】ノイズにより目頭及び目尻部分が隠れている場合でも、顔特徴点として目頭位置及び目尻位置を精度よく検出する。
【解決手段】画像から検出された目頭の第1位置を示す固定の制御点P3、目尻の第1位置を示す固定の制御点P4、上瞼位置候補に対応した制御点P1(第1のパラメータ)、及び下瞼位置候補に対応した制御点P2(第2のパラメータ)により表されるベジエ曲線を第1の瞼形状モデルとし、第1の瞼形状モデルと画像に含まれる瞼の形状とのフィッティング評価値λが最も高いときのP1及びP2を固定した第2の瞼形状モデルにおいて、目頭位置候補を示す制御点P3(第3のパラメータ)、及び目尻位置候補を示す制御点P4(第4のパラメータ)を変更したときのフィッティング評価値λが最も高いときのP3及びP4を目頭の第2位置及び目尻の第2位置として決定する。
(もっと読む)
顔画像における特徴部位の位置を特定する画像処理
【課題】顔画像における特徴部位の位置を特定する画像処理における信頼度の算出精度を向上させる。
【解決手段】画像処理装置は、複数のサンプル顔画像を対象とした統計的分析に基づき設定される顔モデルであって、顔形状を基準形状と形状特徴量とにより表す形状モデルと、顔テクスチャーを基準テクスチャーとテクスチャー特徴量とにより表すテクスチャーモデルと、を含む顔モデルを用いて、対象顔画像における特徴部位の配置を特定する特徴位置特定部と、基準顔画像と対象顔画像との顔テクスチャーを互いに近づけるように基準顔画像と対象顔画像との少なくとも一方に対してテクスチャー補正を行うテクスチャー補正部と、テクスチャー補正後の基準顔画像と対象顔画像とに基づき特定された特徴部位の配置の確からしさを表す特徴部位信頼度を算出する特徴部位信頼度算出部と、を備える。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】マッチング位置を高精度に特定すること。
【解決手段】第1の画像の中の第2の画像とのマッチング位置を特定する画像処理装置であって、第2の画像に含まれる画素から任意の画素をランダムに抽出した画素群であるランダム画素群を複数生成する画素群生成部と、画素群生成部によって生成された各ランダム画素群の第1の画像との相対位置をずらしながら、各ランダム画素群と第1の画像との類似度が最も高くなる位置と、当該位置における類似度とを含む演算結果を、ランダム画素群ごとに算出するマッチング処理部と、マッチング処理部によって算出されたランダム画素群ごとの演算結果に基づいて、第1の画像の中の第2の画像とのマッチング位置を特定するマッチング位置特定部とを備える。
(もっと読む)
1 - 20 / 64
[ Back to top ]