
Fターム[5L096EA33]の内容
Fターム[5L096EA33]に分類される特許
1 - 20 / 60
学習装置、学習装置の制御方法、検出装置、検出装置の制御方法、およびプログラム
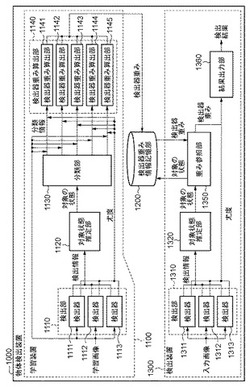
【課題】対象物の状態に適した重みの学習を行い、対象物の検出性能を向上する。
【解決手段】画像から対象物の一部または全部を検出して複数の検出結果を出力する複数の検出部と、複数の検出結果の少なくとも1つに基づいて対象物の状態を推定する推定部と、対象物の状態に基づいて画像を複数のグループに分類する分類部と、検出結果に基づいて、複数の検出部のそれぞれに対する重み情報をグループごとに算出する重み算出部と、を備える。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム

【課題】多様なパターンのジェスチャを認識することを課題とする。
【解決手段】画像処理装置10は、原画像からジェスチャを認識する対象を特徴付ける色を有する画素を抽出する。さらに、画像処理装置10は、原画像から先の色を有する画素が抽出されることによって得られた色画像のフレーム間で差分を抽出する。さらに、画像処理装置10は、色画像のフレーム間で差分が抽出された領域の大きさに基づいて、第1の方式および第2の方式のうち一方の方式を選択する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】文字領域を含む画像に対して当該文字の再利用性の向上を考慮した補正処理を行う。
【解決手段】入力画像から文字領域を抽出し、歪みを補正する。複数の歪み補正後の文字領域に関する情報を用いて歪み補正後の文字領域に対する補正量を決定し、補正を行う。
(もっと読む)
階層マスク生成装置、フレーム補間処理装置
【課題】 高精度で高い演算速度の探索を行う。
【解決手段】 ブロック設定手段511は、代表ブロック座標について、大きさの異なるブロックを設定する。探索範囲候補特定手段521は、前記異なる大きさのブロック毎に第n+αフレームの探索範囲を探索範囲候補として特定する。相対割合演算手段523は、前記代表ブロック座標で特定される第nフレームのブロック内における移動オブジェクトの占める相対割合を演算するとともに、対応する前記第n+αフレームについて、前記各探索範囲候補の探索範囲内における移動オブジェクトの占める相対割合を演算する。決定手段525は、前記相対割合が大きなブロックに対応する探索範囲候補を、前記代表ブロック座標で特定されるブロック探索範囲として決定する。
(もっと読む)
補間フレーム作成装置及び補間フレーム作成方法及び放送受信装置
【課題】特に特殊な時間的周期性を持って処理された画像に対して動きベクトル検出の安定性が維持できるようにし、良好な補間画像を提供する。
【解決手段】本発明の一実施例では、入力フレーム間の検索エリア内のブロックマッチング処理により、前記動きベクトル候補を検出する判定部と、前記検出した動きベクトル候補に基づいて前記入力フレーム間の対応ブロックを決定して前記補間フレームの補間ブロックの画像を作成する補間画像作成部と、前記入力フレームの画質変動の時間的周期性を示す情報に基づいて、前記動きベクトル候補が複数検出されると推定される特定期間を設定する画質変動情報検出部と、前記特定期間では少なくとも前記判定部が前記動きベクトル候補を一意に検出しやすい方向へ閾値の可変を行う処理動作制御部を有する。
(もっと読む)
動画再生装置、動画再生方法、および、動画再生プログラム
【課題】撮像された動画の角度を補正して再生することができる動画再生装置を提供する。
【解決手段】動画再生装置が、取得した動画のフレーム毎に、当該フレームに撮影されている画像の水平方向または鉛直方向を基準とした角度を検出する角度検出部と、角度検出部が検出したフレーム毎の角度に基づいて、取得した動画のフレームに撮影されている画像をフレーム毎に回転させて動画として出力する変換部と、を有する。
(もっと読む)
動画像の動き情報を利用した画像処理装置及び画像処理方法
【課題】動画像データ内に記録されている画像間の動き情報を利用して、複雑な演算無く高精度な位置合わせを可能にした、動画像の動き情報を利用した画像処理装置を提供する。
【解決手段】動画像データ内に記録されているフレーム画像間の動き情報を利用した画像処理装置であって、動画像データを復号化して得られた連続する2以上のフレーム画像から、基準フレーム及び参照フレームを指定する、フレーム選択処理部と、参照フレームから基準フレームへの動きベクトル値を算出する、動きベクトル累積加算変換処理部とを備え、動きベクトル累積加算変換処理部は、動画像データに記録された動き情報を元に、累積加算及び方向変換による演算によって、参照フレームから基準フレームへの動きベクトル値を算出する。
(もっと読む)
オブジェクト軌道合成装置及びそのプログラム
【課題】本発明は、リアルタイム性が高く、精度が高い軌道画像を合成可能とするオブジェクト軌道合成装置を提供する。
【解決手段】オブジェクト軌道合成装置1は、映像を入力する入力手段11と、オブジェクトを抽出するオブジェクト抽出手段12と、重心位置の補正量を算出する予め設定された補正式によって重心位置を補正するオブジェクト重心位置補正手段13と、記憶手段14と、予め設定されたフレーム画像毎に、オブジェクトの軌道を算出してこの軌道を連結した軌道曲線上に重心位置を再度補正する軌道曲線算出手段15と、重心位置を補間する軌道曲線補間手段16と、軌道映像を生成する軌道画像生成手段17と、映像を遅延させる映像遅延手段18と、映像と軌道映像とを合成する映像合成手段19とを備える。
(もっと読む)
瞬き状態検出装置
【課題】 画像データに基づく開眼度の経時変化の検出が途切れた場合であっても、精度よく瞬き状態を検出することができる瞬き状態検出装置を提供する。
【解決手段】 瞬き状態検出ECU1は、顔画像撮像カメラ2で撮像した画像データから検出した運転者の開眼度を検出する。ここで、開眼度の検出に欠落が生じた場合に、欠落部分の補間を行う。欠落部分の補間を行うにあたり、運転者の開眼度の経時変化を10分間分開眼度履歴として記憶しておき、この開眼度履歴の中から、欠落部部分の前後に類似する部分を探し、類似部分の前後の波形に基づいて欠落部分を補間する。
(もっと読む)
情報処理装置及び画像処理方法、並びにプログラム
【課題】本発明は、読み取った文書の画像から表罫線を抽出する際に、対象となる表罫線の選別作業を効率良く行うことができる情報処理装置を提供する。
【解決手段】PC201は、スキャナ202で文書を読み取って得られた画像から第一の罫線候補抽出処理と第二の罫線候補抽出処理を実行して罫線候補を抽出し、抽出された罫線の種別を判定する。そして、判定された罫線の種別に従って罫線候補をグループ分けして修正画面及び/又はリスト画面を表示し、表示された罫線の選択や修正を受け付ける。
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
【課題】
本発明は、それぞれが二次元的に配列された画素で表現された複数フレームからなる連続画像から特定種類のオブジェクトを検出するオブジェクト検出方法等に関し、画像上にあらわれる検出対象のオブジェクトを高速に検出する。
【解決手段】
連続画像を構成する複数フレームの中の異なるフレーム間の差分画像を作成する差分画像を作成し、その差分画像の各画素の周囲に広がる平均化領域内の平均的な値を該各画素の新たな値としたときの、その新たな値と閾値とを比較することにより探索画素を抽出し、画像上の探索領域に作用して検出対象のオブジェクトが存在する確率を表わす評価値を求めるフィルタを、差分画像上の、探索画素の周囲に広がる探索領域に作用させて評価値を求めさせ、その評価値と閾値とを比較することにより、検出対象のオブジェクトが存在する領域を抽出する。
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
【課題】
本発明は、二次元的に配列された画素で表現された画像から特定種類のオブジェクト、例えば人間の頭部や人間の顔などを検出するオブジェクト検出方法等に関し、検出対象のオブジェクトが画像上に多様な形状で写し出される場合であっても、そのオブジェクトを高精度に検出する。
【解決手段】
オブジェクト検出対象の画像上に、オブジェクトの輪郭および内部のうちの互いに異なるいずれかの特徴量を算出する複数のフィルタを作用させて複数の特徴量を算出し、各特徴量に対応する各一次評価値を求める一次評価値算出ステップと、一次評価値算出ステップで求められた複数の一次評価値を総合することにより二次評価値を求める二次評価値算出ステップと、二次評価値算出ステップで求められた二次評価値と閾値とを比較して、閾値を越えて特定種類のオブジェクトが存在する確率が高い領域を抽出する領域抽出ステップとを有する。
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
【課題】
本発明は、二次元的に配列された画素で表現された画像から特定種類のオブジェクト、例えば人間の頭部や人間の顔などを検出するオブジェクト検出方法等に関し、検出対象のオブジェクトが画像上に様々な寸法で写し出される場合であっても、そのオブジェクトを高速に検出する。
【解決手段】
オブジェクト検出対象の原画像を構成する画素を所定比率で間引くことにより、又は所定比率で段階的に間引くことより、原画像と一枚以上の間引画像とからなる画像群を生成する画像群生成ステップS21と、
相対的に小さい画像に相対的に狭い領域に作用するフィルタを作用させる抽出過程から相対的に大きい画像に相対的に広い領域に作用するフィルタを作用させる抽出過程に向けて順次に繰り返すことにより、原画像中から特定種類のオブジェクトを検出する段階的検出ステップS24とを有する。
(もっと読む)
対応点探索装置
【課題】探索ウインドウが入力画像からはみ出して設定された場合であっても、演算コストを増大させることなく、対応点を精度良く探索する。
【解決手段】判定部14は、基準画像及び参照画像に設定された基準ウインドウ及び参照ウインドウにおいて外領域が含まれているか否かを基準ウインドウ及び参照ウインドウがずらされる毎に判定する。補間部15は、判定部14により外領域が含まれていると判定された場合、基準ウインドウ及び参照ウインドウ内の両画像の少なくとも端に位置する画素の画素値に基づいて補間画素値を算出し、当該補間画素値により外領域を補間する。
(もっと読む)
中空糸膜モジュールの検査方法及び検査装置
【課題】中空糸膜モジュールの欠陥検査方法では、検査精度を高めるためには、画像の分解能をあげなければならない。しかし、画像の分解能を上げると、画像データ量が増える。すると画像撮影のために時間がかかり、検査時間が増大するという課題があった。
【解決手段】比較的低い分解能で中空糸膜モジュールの端面の映像を撮り、画像補間によって情報量を増やす。その上で2値化した画像データを用いて欠陥検査を行う。このようにすることで、撮影時間を短くすることができ、またデータ補間と2値化によって、誤検出や過検出といったことのない精度よい欠陥検出をすることができる。
(もっと読む)
映像処理装置及びそれを用いた映像表示装置
【課題】
入力映像が全体的に動くパン映像の場合でも、高画質にフレームレート変換処理を行うことが可能な技術を提供する。
【課題手段】
本発明は、入力映像信号中の複数フレームから検出した映像(物体)動きベクトルを用いて補間処理をして補間フレームを作成し、これを入力映像信号のフレーム列に挿入するフレームレート変換処理において、入力映像がパン映像の場合には、映像の端部を含む領域については、上記動きベクトルに代えて、画面の全体的な動きの方向を示すグローバルベクトルを用いて補間処理を行うことを特徴とする。
(もっと読む)
ビデオ画像のオンライン較正方法およびシステム
【課題】ビデオ画像の一部を、道路標識、橋、レーンマーク等と認識し、車線からのはみ出しに対する警告等の種々の機能をもつ、ビデオカメラを利用する運転支援システムに用いられるオンライン較正方法およびシステムを提供する。
【解決手段】路面上のレーンマークその他の側線を含む画面フレーム内でバニッシングポイントを推定するオンライン較正方法において、車線の左側および右側の少なくとも一方のレーンマークを捉えるか、または遠方において互いに交わるように外挿することによって、バニッシングポイントの位置を特定し、所定の時刻における所与の画面フレームにおいて、レーンマークの片側だけしか捉えられない場合でも、一連の画像を時間フィルタにかけて、長時間にわたるバニッシングポイントの平均座標を求め、このバニッシングポイントの平均座標から、ぶれの影響を除去したビデオカメラのヨー角度とピッチ角度を割り出す。破線状に繰返し規則的に現れるレーンマークを捉え、または遠方において互いに交わるように推測することによって、あるいは路面の特性の出現頻度の変化を用いて、ビデオカメラのピッチ角度を割り出し、かつバニッシングポイントの平均座標を算出する。
(もっと読む)
画像処理装置および画像処理方法
【課題】ターゲットブロックおよび参照ブロックにおける画素精度以上の高精度の動きベクトル検出を、従来よりも小さいハードウエア規模で行うことできる。
【解決手段】参照ブロックの位置を、サーチ範囲において、画面の水平方向(または垂直方向)に順次に異なる位置に移動させ、サーチ範囲における水平方向(または垂直方向)の最後の位置に移動したら、垂直方向(または水平方向)の位置を一つずらし、再度、水平方向(または垂直方向)に順次に異なる位置に移動させるようにして、相関値を算出する。参照ブロック毎に算出した相関値と、それまでの最強相関値とを比較して、相関が強い方を保持していく。参照フレームについての最強相関値が求まったら、その近傍参照ブロックの相関値である近傍相関値を再度求めて、保持する。保持した最強相関値と、近傍相関値を用いて補間処理を行い、高精度の動きベクトルを検出する。
(もっと読む)
情報処理システム
【課題】画像間の座標点を高精度に対応付ける。
【解決手段】基準画像3B上で指定される指定点3Pに対応する参照画像3R上の対応点を特定する際に、指定点3Pに対応する位置を通る第1基準方向に沿った線上で探索して第1対応点候補3N1を特定し、第1対応点候補3N1を通り、かつ第1基準方向に略垂直な第2基準方向に沿った線上で探索して第2対応点候補3N2を特定し、さらに第2対応点3N2を通り、かつ第1基準方向に沿った線上で探索して第3対応点3N3を特定する。
(もっと読む)
画像処理装置および画像処理方法
【課題】画像認識と前処理との間でアクセス制御を効率化し、認識速度と認識精度を向上させること。
【解決手段】画像処理装置10内の原画書込み部13は、カメラ21の撮影画像をFIFOメモリ31に格納し、補間処理部14は撮影画像から補間用データを作成してFIFOメモリ32に格納し、エッジ処理部15は撮影画像と補間用データからエッジ強調データ作成してFIFOメモリ33に格納する。SDRAMコントローラ17は、FIFOメモリ31〜33に格納されたデータを順次読み出してSDRAM22に格納する。これにより、SDRAM22へのアクセス制御と各画像処理とを独立に並行処理可能とする。
(もっと読む)
1 - 20 / 60
[ Back to top ]