
Fターム[5L096FA13]の内容
Fターム[5L096FA13]に分類される特許
41 - 60 / 75
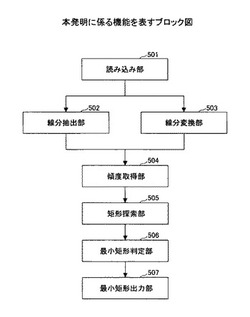
情報処理装置、及び情報処理方法
【課題】オリジナルの電子ファイルが持っているベクタ情報から、精度の高い矩形領域の抽出や領域指定を行う情報処理装置及び情報処理方法を提供することを課題とする。
【解決手段】
本発明に係る情報処理装置は、電子ファイルのベクタ情報を読み込み501、前記ベクタ情報から、線分オブジェクトにおける線分パラメータ情報を抽出502し、また多角形オブジェクトにおける多角形パラメータ情報を抽出し抽出した多角形パラメータ情報から該多角形を構成する線分の線分パラメータ情報を抽出503する。抽出された線分パラメータ情報に基づいて、矩形パラメータ情報を抽出505し、抽出された矩形パラメータ情報により構成される矩形が、矩形を内包しない矩形である最小矩形であるかを判定506する。
(もっと読む)
対象物種別判定装置、車両、対象物種別判定方法、並びに対象物種別判定用プログラム

【課題】画像から対象物の動きの周期性を適切に判断し、対象物の種別を精度良く判定することができる対象物種別判定装置、対象物種別判定方法、車両、及び対象物種別判定用プログラムを提供する。
【解決手段】対象物種別判定装置は、撮像手段2R,2Lにより撮像された画像から対象物の領域を抽出する対象物領域抽出手段11と、抽出された対象物の領域から該対象物の端点を抽出する対象物端点抽出手段12と、撮像手段2R,2Lにより撮像された時系列画像の各画像について、対象物領域抽出手段11により抽出された対象物の領域から、対象物端点抽出手段12により抽出された該対象物の端点を用いて、該対象物のサイズを表す特徴量の時系列データを算出し、該特徴量が所定の周期性を有する変化をしているか否かを判断する対象物周期性判断手段13と、特徴量が周期性を有する変化をしていると判断された対象物を生体と判定する生体判定手段14とを備える。
(もっと読む)
対象物認識装置
【課題】所望のエッジが得られなくても対象物の外形を認識する。
【解決手段】対象物の位置を特定する対象物位置特定手段と、対象物を撮像する撮像装置と、特定された対象物の位置および予め決められた認識すべき対象物の大きさに基づいて、撮像装置により得られた画像上に処理領域を設定する処理領域設定手段と、処理領域に含まれる画素の輝度値に基づいて、処理領域から水平エッジを抽出する水平エッジ抽出手段と、認識すべき対象物の予め設定された特徴に基づいて、抽出された水平エッジのそれぞれが、該認識すべき対象物を示すかどうか判定するエッジ判定手段とを備え、対象物を示すと判定された水平エッジから、対象物の外形を表す水平エッジを選択し、該水平エッジに基づいて対象物の外形を認識するようにした対象物認識装置を提供する。所望の垂直エッジが得られなかった場合でも、得られた水平エッジから対象物の外形を認識することができる。
(もっと読む)
画像処理方法および装置
【課題】動きベクトルの精度を高める。
【解決手段】対応点情報生成部110は、連続した画像フレームを有する画像データ内の始点画像フレームと終点画像フレームとの間で画素毎の対応点情報を求めるマッチングを実行する。動きベクトル検出部152は、マッチングの結果に基づいて始点画像フレーム内で画素毎の動きベクトルを求める。信頼領域分離部154は、動きベクトルが求められた画像フレームをブロック分割し、各ブロックを、算出された動きベクトルの精度が相対的に高い信頼領域と、動きベクトルの精度が相対的に低い非信頼領域のいずれかに分ける。動きベクトル改良部160は、信頼領域の動きベクトルを信頼領域と隣接する非信頼領域の画素に適用したとき、適用後の移動先の画素値と終点画像フレーム内の対応する画素の画素値との誤差を計算し、誤差がしきい値より小さい場合、その画素を信頼領域に組み入れて該画素の動きベクトルを信頼領域の動きベクトルで置換する。
(もっと読む)
画像処理装置
【課題】 特別な装置を用いることなく、飛び出しが発生する可能性のある箇所を検知することが可能な画像処理装置を提供する。
【解決手段】 画像処理装置1は、車両前方を撮像するカメラ10と、画像処理ECU20とを備えている。画像処理ECU20には、カメラ10により撮像された撮像画像中において、注目点を設定する注目点設定部21と、注目点と消失点とを結ぶ直線上であってかつ該注目点の周囲に位置する周囲点を設定する周囲点設定部22と、注目点の特徴量と周囲点の特徴量とを比較して注目点と周囲点との実空間における奥行きの不連続性を判定することにより、飛び出しが発生する可能性のある隙間を検知する不連続性判定部24が構築されている。
(もっと読む)
画像データ処理方法、画像データ処理プログラム及び画像データ処理装置
【課題】2値画像データのランレングス化を高速化する。
【解決手段】2値画像データに存在するランの始端位置と終端位置とを取得する画像データ処理装置10であって、前記ランの始端に対応するビットを始端識別用ビットとしたとき、前記始端識別用ビットが他のビットと異なった値を有する始端識別用データを前記2値画像データから作成する機能と、前記ランの終端に対応するビットを終端識別用ビットとしたとき、当該終端識別用ビットが他のビットと異なった値を有する終端識別用データを前記2値画像データから作成する機能と、前記始端識別用データと前記終端識別用データとに基づいて、前記ランの始端位置と終端位置とを取得する機能とを有する演算処理装置13を有することを特徴とする画像データ処理装置。
(もっと読む)
輪郭情報抽出装置
【課題】 2重始点が検出された画素間格子の次の格子では始点が現れない性質を利用して、該2重始点の処理に必要な始点座標の登録2回の内の1回を、次の格子に移すことによって処理の分散化を図り、どの格子も同一のサイクル数で処理できるようにして、高い性能を保証できる輪郭抽出ハードウェアを提供する。水平ベクトルの2重端点の処理を高速化することによって、輪郭情報を抽出するハードウェアの高速化を図る。
【解決手段】 水平ベクトルの端点を検出する手段と、該端点を登録する手段と、2重端点を検出する手段と、水平ベクトルの接続情報を格納する手段とを有し、2重端点検出手段で登録すべき2重端点を検出した時に、該端点の座標を2つの画素間格子に分けて2回登録することを特徴とする。
(もっと読む)
カメラからのカメラ画像に基づいて位置を判定する装置、方法およびコンピュータ・プログラム
カメラからのカメラ画像に基づいて位置を判定する装置は、ハフ変換器、位置記述設定器およびデータベース比較器を含む。
ハフ変換器は、カメラ画像またはそれから引き出される前処理されたバージョンのなかで円弧または楕円弧を識別し、カメラ画像または前処理されたバージョンをさまざまな方向に通過する複数のまっすぐなストレッチを識別するように形成される。
位置記述設定器は、識別された円弧または楕円弧および識別されたまっすぐなストレッチに基づいて、識別された円弧または楕円弧および識別されたまっすぐなストレッチをパラメータによって記述する位置記述を得るように形成される。
データベース比較器は、更に、位置記述を複数の比較用位置記述と比較し、比較の結果として、位置に関する情報を得るように形成される。
(もっと読む)
画像認識装置及び方法
画像を認識するための装置及び方法が開示されており、画像がライン毎に電子的にスキャンされる。各ラインのピクセルは、処理されて、色調的及び位置的の双方の基準を満たすピクセルが輪郭点として選択される。輪郭点のセットは、画像の性質を判定するために、格納された基準と比較される。  (もっと読む)
(もっと読む)
幾何学的フィーチャーを定義し、識別し、及び学習するための方法及びシステム
【課題】内部又は外部表面及びエッジ、あるいは、画像形成することができるか又は数値的に定義することができる物体の他のフィーチャーを含むシステムの提供。
【解決手段】幾何学的フィーチャーのエッジの幾何学的形状を定義する方法であって、
(A)少なくとも1つの数学的実体を前記幾何学的形状とマッチングさせる段階であって、前記配列がそこから前記対応する前記実体の再構築を可能にするように、前記又は各々の前記実体は属性値を有する予め定められた配列によって実現することができる、前記マッチングさせる段階と、(B)前記又は各々の前記実体に対して、そこから対応する前記実体の再構築を可能とするに十分な情報を提供するように、対応する予め定められた属性値の組から選択された前記属性値を各々の前記属性に適用し、かつ前記選択された属性値に基づいてテキスト・ストリングを生成し、これにより前記エッジの幾何学的形状を定義する段階と、を備える方法が提供される。
(もっと読む)
罫線抽出プログラム、罫線抽出装置、罫線抽出方法
【課題】所定の条件に基づいて抽出した罫線候補の信頼性が低い場合に、条件を変化させて罫線を再抽出する罫線抽出装置、罫線抽出プログラム、罫線抽出方法を提供する。
【解決手段】罫線の要素の図形が満たすべき条件として予め設定された第1条件に基づいて、文書画像から罫線の候補である罫線候補を抽出する抽出ステップと、抽出ステップにより抽出された罫線候補の構造安定性に基づいて、該罫線候補が安定であるか不安定であるかの判定を行う判定ステップと、判定ステップにより安定と判定された罫線候補と第1条件に基づいて、罫線の要素の図形が満たすべき条件であって第1条件と異なる第2条件を決定する条件決定ステップと、条件決定ステップにより決定された第2条件に基づいて罫線候補の再抽出を行う再抽出ステップとをコンピュータに実行させる。
(もっと読む)
閉ループ自動認識装置及び閉ループ自動認識方法
【課題】線分、円弧、区切られた曲線等からなる複数のセグメントから構成される閉ループを容易に、且つ確実に認識することができる閉ループ自動認識装置、閉ループ自動認識方法及びプログラムを提供する。
【解決手段】ユーザに、複数のセグメントのうちの1つを指定させる(ステップS2)。ユーザに、閉ループの認識に当たって許容できる隣り合うセグメント同士の端点間の距離に関する基準値を設定させる(ステップS6)。指定されたセグメントの一方の端点を開始点とし、基準値の範囲になる端点を含む1又は2以上のセグメントを順次探索する(ステップS8〜S11)。そして、探索したセグメントがステップS2、S3において指定されたセグメントと一致すると、それまでの経過で探索された複数のセグメントからなる群を閉ループとして特定して強調表示する(ステップS12)。
(もっと読む)
画像処理方法、画像処理装置及びプログラム
【課題】適切に情報量を削減できるようにする。
【解決手段】例えば血管線における分岐点又は端点から次の分岐点又は端点までの各特徴点を、グループとし、そのグループごとに、連続する3つの特徴点におけるベクトルの外積の絶対値が外積閾値よりも小さいという条件、及び、該3つの特徴点における余弦が余弦閾値よりも小さいという条件の一方を満たす3つの特徴点のうち、当該条件の他方を満たしかつ最小となる3つの特徴点における真ん中を削除する。
(もっと読む)
ロバスト(robust)関心点検出器および記述子
画像に作用する方法および装置が記載されている。特に、複数の異なるスケールおよび異なる回転において機能する関心点検出および/または記述、例えば、スケール不変かつ回転不変な関心点検出および/または記述のための方法および装置が記載されている。本発明は、同一画像内または複数の異なる画像内において関心点をマッチングする、改良されたまたは代替的な装置および方法を提供することができる。本発明は、本発明の方法を実施する、代替的または改良されたソフトウェアを提供することができる。本発明は、フィルタリングされた複数の画像を生成する複数のフィルタリング動作によって生成された、代替的または改良されたデータ構造、および、フィルタリングされた上記画像を記憶する、メモリ内に記憶またはネットワークを介して転送される、データ構造を提供することができる。本発明は、画像内の関心点の記述子を含む、例えばメモリ内に記憶またはネットワークを介して転送される、代替的または改良されたデータ構造、および、そのような記述子を、原画または原画から生じる画像(例えばサムネイル画像)に関連付けるデータ構造を提供することができる。  (もっと読む)
(もっと読む)
画像処理方法及び画像処理装置
【課題】 線図形を含む画像を処理すること。
【解決手段】 画像処理方法は、細線化された線図形の端点と交点とに基づいて、前記線図形の端点もしくは交点間をつなぐ線素または閉曲線ごとの輪郭情報を抽出し、更に、当該抽出された輪郭情報に基づいて、線芯化されたベクトルデータを生成する。
(もっと読む)
CGキャラクタエージェント装置
【課題】テレビ電話の通話で送られてくる画像情報と音声情報から、パーソナルCGエージェントを自動生成・自動更新する。
【解決手段】他端末とテレビ電話用パケットデータを通信するための通信処理部210と、前記テレビ電話用パケットデータから通話相手の画像情報と音声情報を生成するテレビ電話処理部220と、前記画像情報と前記音声情報から通話相手のエージェントデータを生成するエージェントデータ作成部230と、通話相手の個人情報と対応させて前記エージェントデータを記憶するためのアドレス帳データ記憶部250と、前記アドレス帳データに対してデータ検索などのデータ管理を行うアドレス帳データ管理部240と、前記エージェントデータからCGキャラクタエージェントを作成するエージェント出力部270を備える。
(もっと読む)
映像オブジェクト追跡装置および映像オブジェクト追跡プログラム
【課題】映像オブジェクトの位置を正しく推定することのできる映像オブジェクト追跡装置を提供する。
【解決手段】
入力画像Iから2値画像Bを生成する2値画像生成手段4と、2値画像Bをフィルタリングしてボール候補を選定するボール候補選定手段5と、ボール候補に対応した情報で状態量と重みを有する粒子を初期化するか否かを判定する粒子更新判定手段6と、初期化タイミングに粒子を生成する粒子生成手段7と、生成された粒子を記憶する粒子記憶部331と、粒子記憶部331に記憶された粒子の重みを観測に基づき更新する重み更新手段8と、粒子記憶部331に記憶された粒子の状態量を運動モデルに基づき更新する状態量更新手段9と、粒子記憶部331に記憶された粒子の期待値を演算することによりオブジェクトの位置を推定する期待値演算手段11とを備える。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】人物の顔画像から安定に眉部分を検出できることを可能にする。
【解決手段】画像処理装置10は、眉の特徴点以外の特徴点を検出する基準特徴点検出部14と、検出された基準特徴点を元に検出すべき特徴点の探索範囲を決定する探索範囲設定部16と、基準特徴点の位置関係から推定される分離度フィルタを計算する分離度マップ作成部18と、分離度マップを複数の連結領域に分割する領域分割部20と、各領域が特徴点を含む持つ領域であるかどうかを判定する領域判定部22とで構成する。
(もっと読む)
結腸の特徴経路の位置合わせ
【課題】CTスキャナーによる仮想内視鏡検査法において、仮想3次元対象物の複数の特徴経路の位置合わせを効率的に計算するシステムおよび方法を提供する。
【解決手段】個別地点の各経路は経路長の関数として一辺ごとに線形パラメーターに変換される。上記経路は平滑化され、正規化される。短い方の経路は多くの個別の細分間隔に分割される。該細分間隔は、コスト関数を最小化する最小化関数を用いて長い方の経路に写像され、部分最適の位置合わせを得る。上記短い方の経路は、漸進的に上記長い経路に位置づけされ、各地点で最適化が試みられる。上記短い経路がもはやシフト出来ないときには、全体最適の位置合わせが結果として戻される。
(もっと読む)
図形検出処理プログラム及び紙葉処理装置
【課題】 従来の押印検出手法では、画像上の全点について対象図形の形・大きさを表すパラメータ範囲全てに投票を行うパラメータ空間ハフ投票を行う、または画像を一方向に投影して得られるペリフェラル特徴を用いてハフ投票を行うことで検出処理を行っていた。しかし、パラメータ空間ハフ投票では計算量が膨大に掛かる。ペリフェラル特徴を用いた場合は、事前に想定する所定領域内に押印のあることが前提条件となる。そのため、伝票上の任意の位置にある判子押印の高速な検出が課題とされていた。
【解決手段】 上記課題を解決するために、高速多値輪郭抽出という処理と、輪郭区分点投票という処理を導入する。これにより、ハフ投票に掛かる計算量を削減し、高速に押印箇所の検出を行うことができる。
(もっと読む)
41 - 60 / 75
[ Back to top ]