
国際特許分類[A01B63/102]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 農業または林業における土作業:農業機械または器具の部品,細部または附属具一般 (4,134) | 農業機械または器具を昇降する,あるいは位置を調整する装置またはそのための配置 (864) | トラクタに装着された作業機のためのもの (696) | 水圧あるいは気圧によって操作されるもの (611) | トラクタへの装着位置,例.後部,によって特徴づけられるもの (32)
国際特許分類[A01B63/102]の下位に属する分類
中央部,すなわち,前輪と後輪の中間,に装着されるもの (5)
側面に装着されるもの (5)
前面に装着されるもの (12)
国際特許分類[A01B63/102]に分類される特許
1 - 10 / 10
草刈作業機
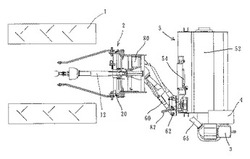
【課題】トラクタの運転席から容易に草刈作業部を操作可能とした草刈作業機を提供する。
【解決手段】草刈作業機において、オフセット機構部と回動機構部の作動は、トラクタ運転席近傍に設けたジョイスティックレバー861の操作によって行われる。また、草刈作業部5が装着部2に対し水平状態を含む一定の角度範囲のときのみトラクタ後方位置へ移動可能に牽制手段が設けられている。さらに、自動収納スイッチ862を備え、自動収納スイッチ862を操作すると自動的に草刈作業部5が水平位置に回動するとともに、トラクタ後方の収納位置へ水平移動する制御部を備えた草刈作業機による。
(もっと読む)
トラクタの旋回制御装置

【課題】枕地における斜め方向への耕耘土の跳ね飛ばしを少なくして、耕耘面の仕上がりを良好に保持することができると共に、旋回時の車速の大小に拘わらず前輪倍速装置が作動するまでに機体が走行する距離を一定とし、最適な旋回タイミングを見つけ出し易くする。
【解決手段】前輪Zが操舵されると、作業機21を上昇させると共に、前輪Zを倍速駆動させて機体の旋回を行うトラクタTの制御装置22において、前輪Zが所定の操舵角以上に操舵されたことを検出するのに伴って作業機21を上昇させる制御を開始すると共に、この上昇制御が開始された後、機体が設定距離以上に走行したことを検出するのに伴って前輪Zの倍速駆動を開始する。
(もっと読む)
作業用車両
【課題】燃料噴射制御手段22を備えたエンジン10にて無段変速機構14を介して走行駆動される走行機体9と,これに昇降可能に装着され前記エンジンにて駆動される作業機2と,前記作業機の昇降用油圧機構5に作動油を供給するために前記エンジンにて駆動される油圧ポンプ17を備えた作業用車両において,走行速度の変化を回避した状態のもとで,,前記油圧ポンプの小型化を図る。
【解決手段】前記作業機2を上昇作動しているときの速度が遅いか,又は,上昇作動しないとき,前記エンジンの回転数をアップするとともに,前記無段変速機構を,走行速度が変化しないように変速作動する。
(もっと読む)
田植機
【課題】ミッションケースやフロントアクスルケースやリヤアクスルケースにて構成される機体を高剛性に構成できるものでありながら、機体のデッドスペースを活用して燃料タンク又は昇降シリンダ等の付属部品を組込むことができ、付属部品をコンパクトに組付けることができる田植機を提供する。
【解決手段】エンジンとミッションケースを搭載する走行車と、前記走行車にリンク機構を介して装設する植付部とを備え、前記走行車の前部のフロントアクスルケースに前輪を支持させ、前記走行車の後部のリヤアクスルケース7に後輪を支持させた田植機において、前記ミッションケースと前記リヤアクスルケース7とを連結フレーム70にて連結し、前記連結フレーム70と運転席13との間に昇降シリンダ27又は燃料タンク46等を配置した。
(もっと読む)
農用トラクタ
【課題】インプルメントが作業高さ範囲よりも上昇したことをインプルメント側で認識できるように構成して、貯留した薬剤や肥料が圃場端部の枕地で不要にこぼれ落ちることを防止する。
【解決手段】トラクタ本機1に備えた主制御装置16に、インプルメント制御用信号Eを出力する出力手段と、リンク機構4の昇降状態に基づいてリンク機構4に連結されたインプルメントが作業高さ範囲よりも上昇した場合にはインプルメント制御用信号Eを補正する出力補正手段とを備えてある。
(もっと読む)
作業車の前輪増速駆動装置
【課題】前輪増速装置を装備した作業車において、旋回時に作業機上昇と前輪増速が同時に作動してしまい、圃場端の耕耘の終了部が斜めになることがあった。
【解決手段】ステアリングハンドル57の回動角を検知する手段と、作業機昇降制御手段と、前輪増速切換手段と、これらの制御手段を備え、ステアリングハンドル57を直進位置から設定角度以上切ると、作業機を上昇させ、前輪を増速駆動するようにした作業車において、前記作業機の上昇動作と前輪を増速駆動する動作との間に所定の時間差を設けた。
(もっと読む)
姿勢制御装置
【課題】車輌本体に対して昇降可能且つ左右に傾動可能に連結された耕耘機に対して自動高さ制御、自動耕深制御及び自動傾き制御を行う姿勢制御装置であって、前記耕耘機を最上昇位置よりは下方で且つ地面よりは上方に位置させた非耕耘作業状態での車輌本体の走行時に、前記自動傾き制御によって前記耕耘機が意に反して大きく傾動されることを防止し得る構造簡単な姿勢制御装置を提供する。
【解決手段】自動高さ制御と自動耕深制御と自動傾き制御とを行うように構成された姿勢制御装置は、車輌本体50の車速vが所定の閾値車速vSより高速の場合には、自動傾き制御の制御精度を緩和させると共に、閾値車速vSを設定高さ位置hSに応じて変更するように構成されている。
(もっと読む)
農用作業車
【課題】トラクタ本体が揺動源となり制御が不安定になることを防止し、且つ角速度センサの応答性の良さを生かして精度よく圃場面の起伏を検知して制御しうる農用作業車を提供する。
【解決手段】農用作業車1の左右の傾斜角の変化速度を検出する角速度センサ19と、前記角速度センサ19の検出値に基づいて、農用作業車1と対地作業装置14との相対角度を制御する制御手段60とを具備し、該制御手段60は前記対地作業装置14の姿勢変化による角速度を減少させるべく相対角度制御を行う農用作業車において、前記制御手段は、角速度センサ19の検出値が一定時間内に閾値を超える頻度が一定以上である場合は、前記対地作業機14の相対角度制御に対する角速度センサ19の検出値の影響を低下させる手段Aを設けた。
(もっと読む)
トラクタ作業機のローリング制御装置
【課題】圃場の畦際等でのトラクタ作業で操向旋回時における不安定なローリング制御状態を回避しようとする。
【解決手段】 トラクタ車体(1)に作業機(2)を装着し、車体(1)の左右傾斜角を検出する傾斜センサ(3)と、車速を検出する車速センサ(4)と、車体(1)の操向角を検出する操向センサ(5)等を有し、各センサ(3)、(4)、(5)の検出に基づいて、車体(1)に対して作業機(2)の連結姿勢を水平制御や、平行制御を行わせると共に、操向センサ(5)が一定以上の切り角を検出すると該水平制御を停止して平行制御を行わせ、この操向センサ(5)が一定以下の切り角を検出して一定時間経過すると該水平制御に復帰させる。
(もっと読む)
畦塗り機
【課題】効率よく作業ができる畦塗り機を提供する。
【解決手段】畦塗り機1は、土を耕耘して盛り上げる盛土体21と、土を締め固めて畦を形成する畦形成体31とを備える。盛土体21および畦形成体31は、これら盛土体21および畦形成体31に対して共通する1つの基準面に沿って移動することにより、トラクタの前進走行に基づいて作業をする右突出作業状態およびトラクタの前進走行に基づいて作業をする左突出作業状態に切換え可能となっている。
(もっと読む)
1 - 10 / 10
[ Back to top ]