
国際特許分類[A47L11/18]の内容
生活必需品 (1,310,238) | 家具;家庭用品または家庭用設備;コーヒーひき;香辛料ひき;真空掃除機一般 (66,069) | 家庭の洗浄または清浄 (12,309) | 床,カーペット,家具,壁,または壁を覆うものの清掃用機械 (677) | 床みがきまたはつや出し機械 (270) | 原動機駆動のもの (117) | 回転する道具を有するもの (94) | 道具がロールブラシであるもの (27)
国際特許分類[A47L11/18]の下位に属する分類
ブラシをかける道具の部品または細部 (10)
国際特許分類[A47L11/18]に分類される特許
1 - 10 / 17
清掃具
【課題】被清掃面の表面状態に拘わらずにスムーズに動かすことができ、操作性に優れていると共に、掻上ロール体が確実に回転して優れた清掃性能が得られる清掃具を提供すること。
【解決手段】本発明の清掃具1は、被清掃面S上の清掃対象物Gを掻き上げる掻上ロール体3と、掻上ロール体3が掻き上げた清掃対象物Gを収容する除去物収容部5とを備え、掻上ロール体3と被清掃面Sとの接触状態を一定に維持するガイド手段6を有し、
前記ガイド手段6が、前方に向かうにつれて上方に持ち上がったソリ部61と平坦な下面を有する平坦後方部63とを有するガイド部、又はローラー状のガイド部であり、ガイド部は掻上ロール体3の下部前方に設けられている。
(もっと読む)
電気掃除機用吸込具の回転ブラシおよびこれを用いた吸込具

【課題】電気掃除機用吸込具に用いられる回転ブラシにおいて、回転ブラシが回転している際に発生する異音を空間部を形成して解消し、かつ被掃除面と接触するパイル毛が均一になるようにし、塵埃の拭き取りや掻き取り能力も維持でき、回転ブラシの回転異音と集塵性能のさらなる向上の両立を図る。
【解決手段】線状ブラシの毛の毛材株113の根元において、隣接する毛材株113間に部分的に植毛しない空間部114aを形成することで、回転ブラシが回転している際に、空間部114aに風を流通させて回転ブラシの直行方向の風の流通の遮断から誘発される異音の発生を解消すと共に、ブラシ毛を混合線状ブラシ11Aとすることで、毛材株の根元から先端までパイル毛は大きく広がり易い構成としパイル毛の先端部での被掃除面と接触が均一にでき、塵埃の拭き取りや掻き取り能力を維持することができる。
(もっと読む)
表面処理ロボット
【課題】狭い寸法の場所を清掃することを容易にする形状要素を持つ、床等の表面を処理するための表面処理ロボットを提供することを目的とする。
【解決手段】表面処理ロボットであって、筺体と、ロボットを清掃表面上で動かす左右の駆動車輪を含む駆動システムと、収集部及び該収集部を通して清掃表面から廃液を吸引する吸引部を含む真空部と、真空部によって除去された廃液を収集する収集容器と、洗浄液を収容するように構成された供給容器と洗浄表面に洗浄液を施すように構成された塗布器と、を含み、ロボットの全体積の少なくとも約25パーセントは、洗浄液が塗布器から施され、及び、廃液が真空部によって収集されるにつれて、供給容器内の洗浄液から収集容器内の廃液に移る一方で、供給容器及び収集容器は、右及び左の車輪によって定められる横軸に沿った、実質的に一定の重心を維持するように構成されることを特徴とする。
(もっと読む)
洗浄ブラシ
【目的】(1)ブラシ基板の洗浄水による腐食や劣化を防止することにより耐久性を高めるとともに、ブラシ基板の軽量化を図ることによりランニングコストを抑えることができる洗浄ブラシ、及び、(2)ブラシ基板からブラシ毛が抜けにくい洗浄ブラシを提供すること。
【解決手段】ブラシ毛束16をブラシ基板14に植毛した洗浄ブラシ10において、ブラシ基板10を発泡倍率1.2以上2.5以下の樹脂発泡体、好ましくは、発泡倍率1.6以上2.2以下の樹脂発泡体から構成する。
(もっと読む)
壁用の洗浄装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
清掃具
【課題】被清掃面の表面状態に拘わらずにスムーズに動かすことができ、操作性に優れていると共に、掻上ロール体が確実に回転して優れた清掃性能が得られる清掃具を提供すること。
【解決手段】本発明の清掃具1は、清掃具に加えられる操作力により回転する駆動輪2,2と、駆動輪2,2から得られる回転力により回転して被清掃面S上の清掃対象物Gを掻き上げる掻上ロール体3と、掻上ロール体3を支持し、掻上ロール体3の回転軸高さ位置を駆動輪2,2の回転軸高さ位置に対して上下に変位させるスイング体4と、掻上ロール体3が掻き上げた清掃対象物Gを収容する除去物収容部5とを備え、掻上ロール体3と被清掃面Sとの接触状態を一定に維持するガイド手段6を有している。
(もっと読む)
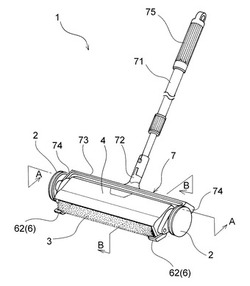
表面デブリ除去装置
表面デブリ除去装置は、ヘッドユニット(1)、取り外し可能なデブリリザーバー(2)、取り外し可能な充電式電源(6)および装置の操作スイッチ(23)を組み込んだハンドル(4)を備える。ヘッドユニット(1)は、互いに逆方向に回転するように駆動されかつヘッドユニット(1)の前方部分に互いに近くに配置された容易に取り外し可能な二本の細長い円柱の回転清掃棒(7)を組み込む。  (もっと読む)
(もっと読む)
自律カバレッジロボット
前方及び後方の端を持つ筺体(100)及び前記筺体によって保持された駆動システム(1600)を含む表面処理ロボット(10;11)。前記駆動システム(1600)は、右及び左の車輪(504、505)を含み、かつ、清掃表面上で前記ロボット(10;11)を動かすために構成されている。前記ロボットは、それぞれ前記筺体(100)に保持された、真空部(1300)、収集容器(W)、供給容器(S)、塗布器(202)、及び、湿潤要素(204)を含む。前記湿潤要素(204)は、前記塗布器(202)によって前記表面に塗布された洗浄液を散布するために、前記清掃表面に接触している。前記湿潤要素(204)は、前記ロボット(10;11)が前方へ駆動される時、前記洗浄液を少なくとも前記清掃表面の一部に沿って散布する。前記湿潤要素(204)は、前記右及び左駆動車輪(504、505)により定められる横軸(24)の実質的に前方に配置され、かつ、前記湿潤要素(204)は、前記清掃表面上において、前記ロボット(10;11)の重量の少なくとも約10パーセントを、スライド可能に支持する。  (もっと読む)
(もっと読む)
床面洗浄清掃機
【課題】 洗浄後の汚水を濾過して再び使用する循環式で、狭い場所でも簡単に、且つ、確実に洗浄できると共に、装置全体をコンパクトに収納でき、収納時の洗浄ブラシの刷毛の変形や衛生上の心配の無いアップライト型床面洗浄清掃機を提供する。
【解決手段】 洗浄水貯留タンク2を床面洗浄清掃機本体1の後方に装着し、洗浄水貯留タンク2の後面に斜めにカットした傾斜面2Aを形成して、床面洗浄清掃機本体1の全体を斜めに仮置き可能とすると共に、仮置き時の操作ハンドル10の姿勢と内部構造の重量バランスにより、洗浄水貯留タンク2が空であっても安定的に仮置きを可能とした。
(もっと読む)
汚れ移送クリーニング媒質を利用して織地、床覆い物、裸の床面をクリーニングする装置及び方法
【課題】クリーニング液体の効果的な使用を促進するカーペットクリーニング機械の提供。
【解決手段】掃除されるべき表面25から汚れを機械的に除去する方法は、クリーニング媒質40の一部をクリーニング液体13にて濡らすステップと、クリーニング媒質40のそれ以前に濡らした部分から全ての汚れ及びクリーニング液体13の少なくとも一部を吸い出すステップと、掃除されるべき表面25をクリーニング媒質40の部分にて拭き掃除し、汚れを掃除されるべき表面25からクリーニング媒質40へ移送するステップとを連続的に且つ繰り返して行うステップを含む。クリーニング方法を実施するため、持運び型で且つ車両型装置を利用することができる。
(もっと読む)
1 - 10 / 17
[ Back to top ]