
国際特許分類[B25J9/08]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | モジュラー構造により特徴づけられるもの (31)
国際特許分類[B25J9/08]に分類される特許
21 - 30 / 31
モジュール制御用プログラム、制御システム

【課題】 複数の構成要素からなる制御システムにおいて各構成要素間の位置及び姿勢と共に、各構成要素のワールド座標系における位置及び姿勢を特定する処理を簡単に行う。
【解決手段】 固有の座標系を用いた複数の構成要素を連結してなる制御システムの各構成要素に実装されるモジュール制御用プログラムであって、自己の構成要素座標系におけるワーキングポイントWPを受け取る情報インターフェース14と、ワーキングポイントWPに所定のオフセットを与えるオフセット保持部12と、上位の構成要素からのワールド座標系における位置・姿勢情報Mn−1を受け取るプログラム間インターフェース11と、ワーキングポイントWPと所定のオフセットと位置・姿勢情報Mn−1とから、ワールド座標系における自己の位置・姿勢情報Mnを演算する座標変換処理部13と、位置・姿勢情報Mnを下位の構成要素に渡すプログラム間インターフェース15とを有する。
(もっと読む)
機能可変型ロボットシステムおよび機能可変型ロボット制御方法ならびに機能可変型ロボット制御プログラム

【課題】無駄な機能を購入することなくネットワークを用いた簡単なシステムで多様な作業を行うことができる機能可変型ロボットシステムを提供する。
【解決手段】車輪を駆動して移動する自律移動型ロボット10と、当該自律移動型ロボット10に着脱自在に取り付けられ、所定の機能を実行する複数の機能モジュール20と、自律移動型ロボット10の移動を制御するパーソナルコンピュータと、複数の機能モジュール20の制御プログラムを格納しているデータベースと、複数の機能モジュール20の各々に付加され、当該機能モジュール20固有の情報を格納している記憶手段24と、自律移動型ロボット10に搭載され、記憶手段24に記憶されている当該固有情報を読み取り、当該機能モジュールを識別する識別手段14と、を備える。
(もっと読む)
機械化された可動構造体を形成するためのモジュール及び機械化された可動モジュール構造体
【解決手段】機械化された可動構造体を形成するためのモジュール(1)は第1プレート状部材(2)及び第2プレート状部材(3)からなり、第1プレート状部材(2)及び第2プレート状部材(3)は互いに対面すると共に、ヒンジ手段(4)と、第1プレート状部材及び第2プレート状部材を相対的に揺動させるための駆動手段(5)とを介し、揺動可能に連結されている。機械化された可動モジュール構造体は、互いに連続的に配列された2つ以上のモジュール(1)からなり、各モジュール(1)の第2プレート状部材(3)は、当該モジュールに隣接するモジュール(1)の第1プレート状部材(2)と連結されている。 (もっと読む)
ロボット手術のためのモジュールマニピュレーター支持体
ロボット手術システムは、取り付けベース、複数の手術器具、および関節支持体アセンブリを備える、各器具は、関連する最小侵襲的アパーチャを通って患者中に、所望の内部手術部位まで挿入可能である。上記関節支持体アセンブリは、上記ベースに対して上記複数の器具を移動可能に支持する。支持体は、一般に、配向プラットホーム、この配向プラットホームを上記ベースに移動可能に支持するプラットホームリンケージ、および上記配向プラットホームに取り付けられる複数のマニピュレーターを備え、ここで、各マニピュレーターは、付随する器具を移動可能に支持する。  (もっと読む)
(もっと読む)
モジュラー型自己構築及び演算システム
【課題】
【解決手段】自己構築及び演算システムのモジュールは、複数のモジュール10、A、B、Cにて形成されたマトリクス150、150´を有する。モジュール10、A、B、C、D、1000、2000、3000、4000の各々は、ピン267b、467b、567b、767b及び穴267a、467a、567a、767a型接続部を通して互いに取り外し可能に結合され、電源69に対するハウジング800を形成する6つまでの接続組立体40、200、300、400、500、600、700、1010、2010、3010、4010を備えている。接続組立体40の各々は、取り付けられた接続板31ないし36を有する、回動可能に取り付けられた脚部25ないし30、1050、1060、1070、1080、2050、2060、2070、2080、3050、3060、3070、3080、4050、4070、4080と、中央コネクタ68とを備えている。モジュール10、A、B、C、D、1000、2000、3000、4000の中央に配置された電源69は、中央コネクタ68の各々と連通している。マトリクス150、150´内の色々なモジュール10、A、B、C、D、1000、2000、3000、4000に対して、それらの脚部25ないし30、1050、1060、1070、1080、2050、2060、2070、2080、3050、3060、3070、3080、4050、4070、4080を動かし又は回動させてマトリクス150、150´の構造体の全体を動かし又は変更し又はモジュール10、A、B、C、D、1000、2000、3000、4000の電源69を交換するといったような仕事を実行するよう命令を与えることができる。 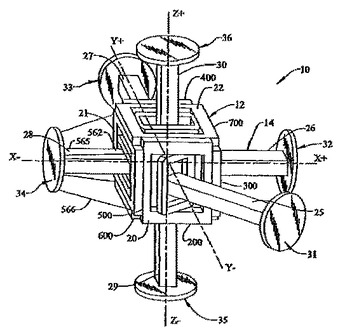 (もっと読む)
(もっと読む)
三次元多目的素子システムおよび三次元多目的素子を生成するための方法
【課題】移動および他の素子との連結、他の素子からの分離をコンピューターによって制御することのできる単一の一体型素子を備えた三次元多目的素子システムを提供する。
【解決手段】システムの単一素子は壁部(6)から作成されるケーシングから構成され、単一素子のケーシング壁部の相互位置を変化させるエレクトロプラスチック作動装置(3)により互いにリンクされる。壁部の相互位置は、プログラム可能な集積回路(1)から伝送される励起信号により変化が起こる。熱エミッタ(14)はシステム装置から余剰熱を運び去る。単一素子内には、各単一素子を連結するためのインターロック(7)と磁気コイル(8)とが設けられ、さらに集積回路(1)と、インターロックと、磁気コイルと、エレクトロプラスチック作動装置とに電圧を供給する電圧源(5)が設けられている。 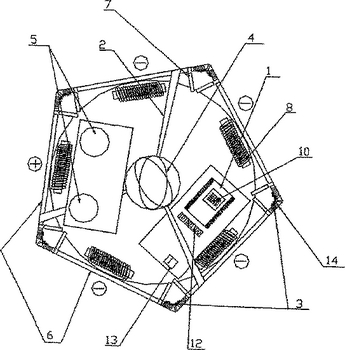 (もっと読む)
(もっと読む)
関節ロボット
【課題】超音波モータの予圧力を小型かつ単純な機構により適宜調節することが可能な関節ロボットの提供。
【解決手段】圧電体11,12,13,14と、さらに外周端部を張り出した固定子フランジ4と、をともに積層し、圧電体11,12,13,14とこの固定子フランジ4とを一体に縦貫して両端面中央に開口する中空孔1aが形成された固定子1と、この固定子1の振動端面上に載置されて、この固定子1の中空孔1aの延長上に貫通する貫通孔2aが形成された回転子2と、中空孔1aと貫通孔2aとを一連に挿通し、その両端を固定子1と回転子2とのそれぞれに協調して張力を伝達可能に相対峙する2つの固定部材に固定されて張架されたワイヤ3と、を具備させる特徴的構成手段の採用。
(もっと読む)
ロボット用サーボユニット、ロボット用関節サーボ
【課題】 L字状の筐体に内蔵されたメカニズムによって、小型で、かつデッドスペースの少ないロボット用サーボ機構を作る。
【解決手段】 41、42は内部に小型のモータ、減速機構、ポテンションメータを備えているロボット用サーボユニットの第1、及び第2の筐体であり、両者とも外観がL字状に形成されることによって、一点差線で示した連結空間41a、41bが作られている。
そして、この連結空間41aに対して出力軸41bが、連結空間42aに対して出力軸42bが突出するように配置されている。
50は内部に直交する貫通孔が設けられている十字結合体を示したもので、出力軸41bに矢印方向から嵌入してねじによって固定され、次に、矢印方向から第2の筐体42の出力軸が嵌入され、その軸が十字結合体50に固定されることによって、第1の筐体41と第2の筐体42が十字結合体宇50によって一体化されロボット用関節サーボが作られる。
(もっと読む)
ロボットシステム
【課題】 ロボットシステムにおいて、計算機にかかる負荷を軽減し、また特定自由度への外乱の影響を協調的に調整することを可能とし、全体としての移動運動などパフォーマンスを安定維持することができるようにする可能とする。
【解決手段】 個々にアクチュエータを備えた複数の構造体からなり、各アクチュエータの自由度毎に対応して設けた複数の計算機を備える。各アクチュエータの計算機は通信ネットワークを介して結合し他のアクチュエータのセンサ情報を含む他の計算機の内部状態を取得する。各計算機には、各自由度の運動制御のため非線形振動子モデルを備え、前記非線形振動子モデルは他の計算機からの周期パターン入力に対して、自律的に振動周期を合わせ、また結合係数により決まる位相差を協調的に生成する。また全てのネットワーク結合されている計算機内で共有されたメモリを個々に備え、常に通信を介して更新する。
(もっと読む)
ロボットアームと、その回転関節装置及び手首装置
【課題】 非製造業分野のためのロボットアームについて、関節動作の制限をできるだけなくし、またアームと環境との干渉を避けやすい構造とすること、また、対人、対環境安全性を向上させるため、外力に順応する動作が可能な構造にする。
【解決手段】 回転可能に連結した2つのリンクを駆動するため、角度検出器とトルク検出器とアクチュエータとローカルコントローラ8とを有し、関節の回転と共に摺動しながらリンク間の電気的接続を維持するスリップリング機構を具備する。角度検出器およびトルク検出器から得られた角度およびトルクの値に基づきながら、マスタコントローラから指示された位置、トルク、剛性、粘性の各特性に関する制御を同時に実現するため、アクチュエータへの制御コマンドをローカルコントローラ上で演算し、かつリンク間の電気的接続を維持しながら無限に回転可能である。
(もっと読む)
21 - 30 / 31
[ Back to top ]