
国際特許分類[B60T8/58]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | 速度条件,例.加速度または減速度,に応ずるもの (1,230) | 速度および別の条件または複数の速度条件に応ずるもの (81)
国際特許分類[B60T8/58]の下位に属する分類
国際特許分類[B60T8/58]に分類される特許
1 - 10 / 35
自動車の横加速度を評定するための装置および対応する方法
自動車の横加速度を評定するための装置は、車両の2つの車輪の回転速度を測定する手段(6、7)と、これらの速度から車両の横加速度を推定するモジュール(D3)とを備える。装置はさらに、車両の作動パラメータ、特に前記車輪の回転速度および関連する変速比に応じて、モジュールによって推定された横加速度が湾曲の検知に関連する場合は負であり、その逆が真である場合は正であるブール値設定変数を計算することができる検証モジュール(2)を備える。  (もっと読む)
(もっと読む)
車両用ナビゲーション装置
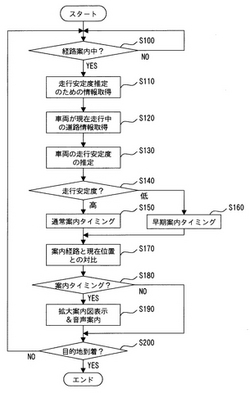
【課題】車両の走行安定度を考慮して経路案内を実施することにより、車両の運転者が十分な余裕を持って、進路変更のための運転操作を行うことが可能な車両用ナビゲーション装置を提供すること。
【解決手段】車両が走行する道路上における車両の走行安定度を推定し、推定された走行安定度が低い場合には、高い場合に比較して、経路案内の実施時期を早める。これにより、車両の運転者は、車両が案内対象地点に到達するまでの間に、その案内対象地点において進路を変更するために必要な運転操作を余裕を持って行うことができる。
(もっと読む)
加減速度制御装置及び加減速度制御方法

【課題】 1つの操作部材の限られたストロークで必要十分な加減速のダイナミックレンジを実現しつつ、当該操作部材の操作性を高めることができる加減速度制御装置の提供を目的とする。
【解決手段】 本発明は、ユーザにより操作される1つの操作部材の操作量を検出する手段を備え、該操作量に応じて車両の加減速度に関連する運動パラメータを制御する加減速度制御装置であって、前記操作部材の操作ストローク内に、操作量に対する運動パラメータの変化勾配が他の領域とは異なる特異領域が設けられることを特徴とする。
(もっと読む)
車両用差動制限制御装置
【課題】 スプリットμ路面で制動を解除したときに、高摩擦係数路面側の車輪に対して不必要に差動制限が行われることを回避する。
【解決手段】 スプリットμ路面でブレーキペダル31の操作が解除されると、低摩擦係数路面側に比較して高摩擦係数路面側の方が車輪速の復帰勾配は大きいから、低摩擦係数路面側の車輪速と高摩擦係数路面側の車輪速との間に車輪速差が生じる可能性がある。この差がしきい値を超えると高摩擦係数路面側の車輪に対して差動制限が行われることになるが、ブレーキペダル31の操作解除後は、擬似車体速Vrefが仮想擬似車体速Vref*以上となるまでの間、ブレーキLSD制御を禁止することにより、高摩擦係数路面側の車輪に対して誤って差動制限が行われることが回避される。
(もっと読む)
ブレーキ制御装置
【課題】 フェールセーフ判断の邪魔をすることなく、ペダルフィーリングの確保が可能なブレーキ制御装置を提供すること。
【解決手段】 ブレーキ制御装置において、ABS制御手段による減圧制御中に、前記擬似車体速の変化率が所定値より大きく、かつ、前記車輪速変化率が所定値より小さいスリップ発散条件を満たしたかどうかを判断するスリップ発散判断手段と、このスリップ発散判断手段によりスリップ発散条件を満たしたと判断したときは、ABS制御手段による制御に代えて、増圧と減圧を繰り返す増減圧指令を出力する増減圧割り込み制御手段を設けた。
(もっと読む)
滑走再粘着制御における固着防止方法
【課題】 車両の走行中に車輪が滑走した際に、車輪の固着を抑制しつつ、制動の応答性を向上させることである。
【解決手段】 車輪の滑走を検知したら、その車輪のブレーキ装置のRV弁を開いて、ブレーキシリンダ圧力P1を減少させる。車輪の車軸の滑り率ηが50%以上になったら、さらにブレーキシリンダ圧力P1を減少させるが、車輪の加速度αが増加に転じ、αが2km/h/sを越えたら、RV弁を閉じてブレーキシリンダ内圧P1を保持する。そして、車輪が再粘着したことを確認したら、ブレーキシリンダ内圧P1を上昇させる。
(もっと読む)
車体スリップ角推定方法
【課題】
車体スリップ角微分値及び車体スリップ角の発散を防止する車体スリップ角推定方法を提供する。
【解決手段】
車両力学モデルに基づいて、現在の推定車体スリップ角を算出する際に直前の推定車体スリップ角を回帰的に用いて車両の進行方向と車両の前後軸とのなす角度である車体スリップ角を推定する車体スリップ角推定方法において、前記車体の速度を検出するステップと、前記車体の速度が規定速度以下であるか否かを判定するステップと、前記車体の速度が前記規定速度以下である時、現在の推定車体スリップ角を強制的にゼロとすることにより、推定車体スリップ角の発散を防止するステップとを具備して構成する。
(もっと読む)
ブレーキ液圧制御装置
【課題】マスターシリンダ液圧に基づく目標減速度およびマスターシリンダストロークに基づく目標減速度と、これらの間の重み付けとから求める目標減速度が、アンチスキッド作動中も運転者の要求減速度に良く符合するようになす。
【解決手段】S12で前輪アンチスキッド作動中と判定し、S14で保圧中や減圧中であると判定する場合、S15で求めた路面摩擦係数μを用い、S16で、目標減速度重み付け係数K=(1.4−μ)/1.4を求める。この係数Kは、μが設定値1.4以下である時に、そして、μが小さくなるほど1へ向けて大きくなる。S17では、マスターシリンダ液圧Pmcに基づく目標減速度Gpを求めると共にマスターシリンダストローク量Sssに基づく目標減速度Gsを求め、S18で目標減速度Gt=K×Gp+(1-K)×Gsを求める。後輪制動力は、Gtが前輪制動力との共働により達成されるような値に電子制御する。よって、前輪のアンチスキッド作動中は非作動中に比べ係数KがGpの重みを増すことになり、アンチスキッド制御中Sssが低下してもGtが運転者の要求減速度に対し不足することがない。
(もっと読む)
制動制御装置
【課題】 車輪の上下動があってもABS制御装置を適切に作動させ、制動距離を短縮可能な制動制御装置を提供すること。
【解決手段】 各車輪の制動力を制御する制動制御装置において、各車輪に対応する位置の車高を検出する車高検出手段と、各車輪のアブソーバの伸縮量を検出するアブソーバ伸縮量検出手段と、車高検出手段により検出された車高とアブソーバ伸縮量検出手段により検出されたアブソーバの伸縮量に基づき、車輪にかかる荷重を推定する軸荷重推定手段と、軸加重推定手段により推定された軸荷重に基づき、制動時の車輪ロックを防止するABS制御装置の制御特性を変更する制動制御特性変更手段と、を有することを特徴とする制動制御装置を提供する。
(もっと読む)
車両用制動装置
【課題】 ABS性能の低下を抑えながら、ABS作動中において違和感を低減した良好なブレーキ操作フィーリングを確保することができる車両用制動装置を提供すること。
【解決手段】 車輪のスリップ状態に応じ、所定の制御アルゴリズムに沿って増圧モード・保持モード・減圧モードの切り換えを行い、車輪のロックを抑制するように車輪の制動力制御する車両用制動装置において、前記所定の制御アルゴリズムに沿って保持モードを選択していても、車輪スリップが減少する方向にある場合は、保持モードに代えて増圧モードを選択実行するABS制御手段を設けた。
(もっと読む)
1 - 10 / 35
[ Back to top ]