
国際特許分類[B60W10/12]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615) | 差動装置の制御を含むもの (207)
国際特許分類[B60W10/12]に分類される特許
1 - 10 / 207
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
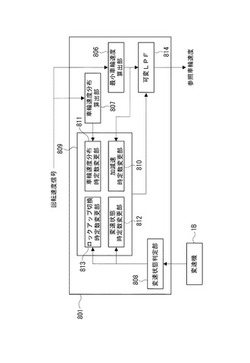
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う時定数可変の可変フィルタ処理部814と、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809と、建設車両の変速機の状態を判定する変速状態判定部808とを備え、時定数変更部809は、変速状態判定部808で変速機が変速中であると判定されると、可変フィルタ処理部814の時定数を現在よりも大きくする変速状態時定数変更部812を備える。
(もっと読む)
車両の駆動状態制御装置

【課題】オンデマンド式装置において、4輪駆動状態から2輪駆動状態への切り換えの際、クラッチ駆動電流が無駄に消費されること、並びに、車輪に大きなスリップが発生することを抑制すること。
【解決手段】2輪駆動状態において駆動輪(後輪)に加速スリップが発生したとき、駆動システムが2輪駆動状態から4輪駆動状態へと切り換えられる。即ち、多板クラッチ機構の伝達可能最大トルクTが「0」から所定値T1に増加する。4輪駆動状態では、車輪の何れにも加速スリップが発生しない状態で車両が所定距離Daだけ走行する毎に、伝達可能最大トルクTが現在値から所定値Aだけステップ的に減少していく。即ち、多板クラッチ機構C/Tに供給されるクラッチ駆動電流Iが徐々に(ステップ的に複数回)減少していくとともに、前輪(後輪)への駆動トルク配分が徐々に減少(増加)していく。
(もっと読む)
車両
【課題】車両の進路上の路面変化に対応した適切な駆動力配分を前以て実現することができる車両を提供する。
【解決手段】車両のメインECU3は、第1情報取得部4Aにより取得された第1情報から導出される第1位置の路面摩擦係数である第1摩擦係数μ1と、第2情報取得部4Bにより取得された第2情報から導出される第2位置の路面摩擦係数である第2摩擦係数μ2とから、車両の総駆動力の目標値を決定する。そして、総駆動力の目標値を満たし且つ第1摩擦係数μ1に対応したスリップ限界を超えないように、第1駆動力および第2駆動力の目標値を決定する。
(もっと読む)
ドライバー支援システム及びドライバー支援システムの調整のための方法
【課題】車両の中のブレーキ装置と車の車軸の二つの駆動車輪の間のアクティブリミテッドスリップデフとの間の、改良され且つ簡単化されたネットワークを作る。
【解決手段】ドライバー支援システムは被駆動車軸の車輪の上のブレーキ装置4並びにリミテッドスリップデフ3を含んでいる。少なくとも開ループまたは閉ループのいずれかを有する制御ユニット1の中で制動トルク又はロックトルクが求められ、その際少なくとも開ループまたは閉ループのいずれかを有する制御ユニット1の後方に配分モジュール2が接続されており、この配分モジュール2の中でブレーキ装置4及びリミテッドスリップデフ3の制御のための制御信号を生み出すことが出来る。
(もっと読む)
駆動力制御装置
【課題】車両の走行時におけるステア特性を向上させることができ、かつ、運転者が違和感を持つことを抑制することの可能な駆動力制御装置を提供する。
【解決手段】車両のステア特性を目標ステア特性にするべく、車両の駆動輪の駆動力を制御する駆動力制御装置において、車両の運転者の意図から求めた駆動輪の基本駆動力に対して、車両のステア特性を相対的に向上させるために増加する分の駆動力を求める第1算出手段(ステップS1)と、増加する分の駆動力の上限値を複数の条件に基づいて複数求める第2算出手段(ステップS2,S4,S5)と、第1算出手段により求められた増加分の駆動力を、第2算出手段により求められた複数の上限値のうち最も小さい上限値により制限して、最終的な駆動力の増加量の上限値を求める第3算出手段(ステップS6,S7)とを備えている。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 駆動力配分装置および横滑り防止装置を備えた車両において、両者の協調制御を的確に行って車両の安定性能の向上および制御応答性の向上を図る。
【解決手段】 駆動ヨーモーメントm8が最大駆動ヨーモーメントm10以下の場合には、協調制御部M11が駆動力配分装置Drに駆動ヨーモーメントm8を発生させるので、車両減速度を発生する横滑り防止装置VSAの作動を最小限に抑えて運転者の違和感を小さくすることができ、しかも駆動ヨーモーメントm8は立ち上がりが早いために、利き出しが滑らかであるだけでなく制御応答性が高められる。駆動ヨーモーメントm8が最大駆動ヨーモーメントm10を超えた場合には、協調制御部M11が駆動力配分装置Drに最大駆動ヨーモーメントm10を発生させるとともに、駆動ヨーモーメントm8に対する不足分を横滑り防止装置VSAに発生させるので、駆動力配分装置Drでは賄いきれない駆動モーメントm8を横滑り防止装置VSAで補って車両を安定化することができる。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両のヨーモーメントを制御する駆動力配分装置および横滑り防止装置の制御干渉を最小限に抑えながらヨーモーメントの制御効果を最大限に発揮させる。
【解決手段】 左右の後輪WRL,WRRにトルク配分可能なリヤディファレンシャルギヤDrの作動だけで目標ヨーモーメントが発生可能であるときには、リヤディファレンシャルギヤDrだけを作動させる。目標ヨーモーメントが増加してリヤディファレンシャルギヤDrの作動だけでは不足のときには、リヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御により目標ヨーモーメントを発生させる。目標ヨーモーメントが更に増加してリヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御だけでは不足のときには、リヤディファレンシャルギヤDrおよび横滑り防止装置VSAによる前輪WFL,WFRおよび後輪WRL,WRRのブレーキ制御により目標ヨーモーメントを発生させる。
(もっと読む)
車両の協調制御装置
【課題】横滑り防止装置およびトラクションコントロール装置の作動が抑制されたときに協調制御が的確に行う。
【解決手段】スイッチSWが横滑り防止装置VSAおよびトラクションコントロール装置TCSの作動を抑制する位置にあるとき、リヤディファレンシャルギヤDrのヨーモーメント付加要求量および横滑り防止装置VSAのヨーモーメント付加要求量の符号が同一の場合には、絶対値が大きい方からリヤディファレンシャルギヤDrのヨーモーメント制御量を算出し、両ヨーモーメント付加要求量の符号が異なる場合には、横滑り防止装置VSAのヨーモーメント付加要求量からリヤディファレンシャルギヤDrのヨーモーメント制御量を算出する。横滑り防止装置VSAおよびトラクションコントロール装置TCSの作動が抑制された状態でも協調制御による高い精度でヨーモーメント制御量を算出し、単独制御する場合に比べて良好な車両挙動を維持できる。
(もっと読む)
ハイブリッド車両
【課題】電動駆動時の変速段の選択の自由度と、ハイブリッド駆動時における変速段のプレシフトの自由度を高めることができるハイブリッド車両を提供する。
【解決手段】第1入力軸13と第2入力軸14を差動歯車装置25のキャリア20と第1サンギヤ21にそれぞれ結合し、第2入力軸14にモータジェネレータ2を結合する。エンジン1と第1入力軸13の間にクラッチCL1を介在させ、エンジン1と第2入力軸14の間、エンジン1と第2サンギヤ22の間にクラッチCL2,CL3を介在させる。第1入力軸13と出力軸15,16の間に1速,5速ギヤ列40,41を選択可能に設け、第2入力軸13と出力軸15,16の間に3速,7速ギヤ列44,45を選択可能に設ける。偶数の変速段は第1入力軸13側のギヤ列と第2入力軸14側のギヤ列を出力軸15,16に同時に接続し、その状態でクラッチCL3を接続して得る。
(もっと読む)
1 - 10 / 207
[ Back to top ]