
国際特許分類[B60W30/12]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | 走行軌跡維持制御 (264) | レーンキープ (178)
国際特許分類[B60W30/12]に分類される特許
1 - 10 / 178
運転集中度基盤の車線維持制御装置およびその方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
走行進路生成装置および走行制御装置
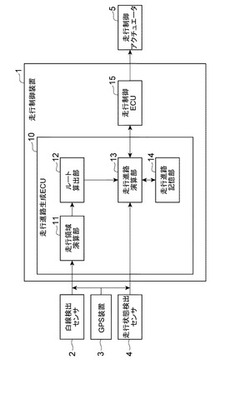
【課題】 生成した走行進路に基づいて実進路の走行を行うにあたり、実進路をスムーズなものとし、車両の乗員に与える違和感を小さくすることができる走行進路生成装置および走行制御装置を提供する。
【解決手段】 走行進路生成ECU10における走行進路演算部13は、ルート算出部12で算出したルート12に含まれる今回目標通過点と、走行進路記憶部14に記憶された前回走行進路に含まれる前回目標通過点を用いて、今回走行進路を生成する。ここで、前回目標通過点には、車両の近傍における固定目標通過点と固定目標通過点以外の探索目標通過点が含まれており、今回走行進路を生成するにあたり、固定目標通過点は固定とし、探索目標通過点を適宜今回目標通過点に変更して今回走行進路を生成する。
(もっと読む)
走行進路生成装置および走行制御装置

【課題】 走行進路を所定の時間内で生成することができ、たとえば自車両を停止させる制御を行わずに済ませることができるとともに、所望の走行進路の精度をある程度維持することができる走行進路生成装置および走行制御装置を提供する。
【解決手段】 走行進路生成ECU10は、走行進路を生成する走行進路演算部13を備えている。走行進路演算部13では、自車両位置と目標到達位置に基づいて、デフォーメーション法によって走行進路を生成する。また、デフォーメーション法による走行進路の解が所定時間内に発見できない場合に、デフォーメーション法よりも演算時間が短いステッププランナ法によって走行進路を生成する。
(もっと読む)
車両走行支援装置
【課題】分岐路の判定を誤って行った場合でも、誤りを早期に認識して訂正することができ、実際の左右の境界線に基づく走行支援制御を行う。
【解決手段】カメラにより取得された車両の進行方向の路面の画像に基いて、路面の「左側境界線及び右側境界線」を検出する。本線から分岐する分岐路が存在している場合に「車両が進行するに連れて大きさが大きくなる分岐路指標値BRH」を前記検出された「左側境界線及び右側境界線」に基いて取得するとともに、その分岐路指標値の大きさが第1閾値A1以上であるとき分岐路が存在していると判定する(ステップ520及びステップ530)。更に、分岐路が存在していると判定した後に取得される分岐路指標値BRHの大きさが「第1閾値A1以下である分岐判定終了閾値(第2閾値A2)」よりも小さくなった場合、前記分岐路が存在しているとの判定を取り消すように構成されている(ステップ550及びステップ570)。
(もっと読む)
車両運転支援装置、車両が走行する道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、楕円偏光が優勢な実際の道路環境においても正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】車両の車軸方向(または車両の高さ方向)に2つの偏光カメラを配置して偏光画像撮像系を構築した上で、車軸方向の偏光成分の光強度(H)および当該車両の高さ方向の偏光成分の光強度(V)から算出される偏光状態特徴量を、画像において対をなす画素毎に比較し、その差分が所定の閾値を超える場合に、これを路肩として検出する。検出された路肩の位置情報に基づいて、操舵制御手段、走行速度制御手段および警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
インホイールシステムを利用した車線維持補助システム
【課題】 インホイールシステムを利用した車線維持補助システムを提供する。
【解決手段】 車両走行中の車線離脱危険度を判断する段階、車線維持補助のための必要ヨーレートを演算する段階、前記演算された必要ヨーレートと実際ヨーレートとの差による要求ヨーレートを算出する段階、前記要求ヨーレートを実現するためのトルクベクタリング駆動力配分量を演算する段階を含むインホイールシステムを利用した車線維持補助システムであり、車線離脱の危険がある場合、操向トルクを用いないので運転手に違和感を与えず、後輪駆動力の変化を利用することによって違和感を最小にすることを特徴とする。
(もっと読む)
車両用運転支援装置及び車両用運転支援方法
【課題】ドライバの覚醒を促す情報の出力時における車両の運転支援制御をより適切に行うことを目的としている。
【解決手段】運転支援装置100は、ドライバの覚醒度に応じてドライバの覚醒を促す情報である覚醒促進情報を出力する覚醒促進情報出力部123と、車線維持支援モード及び車間距離維持支援モードを含む運転支援モード、又は車線逸脱警報モード及び接近警報モードを含む警報モードのいずれか一方のモードを設定するモード設定部125とを含み、モード設定部125は、覚醒促進情報出力部123が覚醒促進情報を出力してから予め設定した時間が経過するまでの期間において、運転支援モードを設定する。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
運転支援システム
【課題】複数のカメラの画像に基づいて運転支援を行う際に、適切な運転操作を支援する。
【解決手段】車線維持の運転支援中に、方向指示器スイッチの操作が検出されると、方向指示器が操作された方向と同じ方向の車両後方を第2の撮像手段または第3の撮像手段により撮像された画像から車線変更に障害となる車両を認識し、障害となる車両が存在しないと判断した際に、車線維持支援手段に対して、維持するべき車線を方向指示器が操作された方向の隣の車線に変更することを指示して車線変更を行い、障害となる車両が存在すると判断した際に、車線変更を抑制し、障害となる車両が存在しなくなるまで待機した後に、車線変更の抑制を解除する車線変更支援手段とを備える。
(もっと読む)
1 - 10 / 178
[ Back to top ]