
国際特許分類[B60W50/02]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムの細部 (393) | 制御システムの故障時の安全確保,例.故障の診断,故障の回避,故障からの復帰によるもの (79)
国際特許分類[B60W50/02]に分類される特許
1 - 10 / 79
車両及び車両の故障検知方法
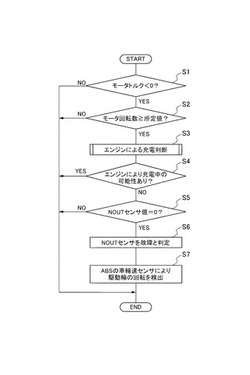
【課題】本発明は、原動機として電動機を有する車両においても、駆動輪や出力軸の回転を検出する回転センサの故障検知を頻繁に実施可能とすることによって、回転センサから得られる情報の信頼性を向上可能な車両及び車両の故障検知方法を提供する。
【解決手段】本発明において、車両1は、モータ7と、モータ7からの機械的動力を、モータ7と係合する第1主軸11で受け、複数の変速段のうちいずれかを係合状態にして第1主軸11と駆動輪DW,DWとを係合させることが可能な第1変速機構と、モータ7の回転を検出するレゾルバ112と、カウンタ軸14の回転を検出する出力軸回転センサ114と、を備える。駆動輪DW,DW側から伝達されるトルクによってモータ7が制動力を発生させているとき、出力軸回転センサ114により検出されたカウンタ軸14の回転がゼロ又は負である場合には、カウンタ軸14を故障と判定する。
(もっと読む)
車両用故障診断装置

【課題】車両運転者が、バイワイヤシステムの故障検出のために必要な操作を容易に行うことができる技術を提供
【解決手段】バイワイヤ制御部15は、起動スイッチのオン後に、ステアリング可動域制限部11(アクセル可動域制限部12、ブレーキ可動域制限部13)により、ステアリングST(アクセルペダルAP、ブレーキペダルBP)の操作を0°〜54°(0%〜10%、0%〜10%)の範囲内に制限する。そして、ステアリング操作量(アクセル操作量、ブレーキ操作量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)内であると判断した場合に、転舵量(駆動量、制動量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)に応じて予め設定されたステアリング正常判定範囲(アクセル正常判定範囲、ブレーキ正常判定範囲)内であるか否かを判断する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】アクセルペダル反力発生装置の故障時にも運転者に違和感を与えることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両の前方障害物に対するリスクポテンシャルを算出し、リスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに、アクセルペダルを操作するときに発生する操作反力を増大させる。アクセルペダルにリスクポテンシャルに応じた反力を付加する反力発生装置の故障が検出されると、アクセルペダルを踏み込んでもエンジントルクが増大しないようにエンジントルク特性を補正する。
(もっと読む)
中央制御装置
【課題】フェールセーフ動作の検証工数増加を抑制するとともに、故障が疑われるような故障推定状態であっても車両の動特性を安定的に維持可能な中央制御装置を提供する。
【解決手段】車両の状態量を検出する複数のセンサa〜cと、該センサa〜cの検出結果を用いて車両の動特性を制御するデバイス群3とに接続され、センサa〜cの異常状態を判定して複数のセンサa〜cのうち一のセンサに異常があると推定された場合に、デバイス群3に対する一のセンサの検出結果の出力を停止して、異常があると推定した一のセンサが検出する車両の状態量を、他のセンサの検出結果に基づき暫定出力することを特徴とする。
(もっと読む)
自動車の運転者をサポートするための方法
本発明は、操車時に自動車の運転者をサポートするための方法に関する。はじめに自動車の周辺を検出し(3)、当該検出された周辺に基づいて、操車を行うための少なくとも1つの適切な軌道を計算し、操車を行うために自動車を自動的に制御する(5)。障害時には、自動車制御が終了したことを運転者に知らせ(11)、運転者は指示を得て、この指示に基づいて操車を続ける。 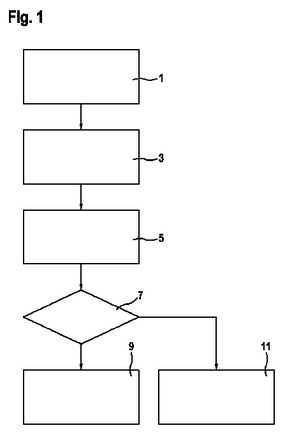 (もっと読む)
(もっと読む)
ハイブリッド車両の制御装置
【課題】切り替え機構の故障時における好適なフェールセーフを実現する。
【解決手段】
内燃機関(200)と、動力伝達機構(400)と、第1電動発電機(MG1)と、駆動軸(600)との間で動力の入出力が可能に構成された第2電動発電機(MG2)と、蓄電手段(12)と、動力伝達機構に備わる一の回転要素(S2)の状態をロック状態と非ロック状態との間で選択的に切り替え可能なロック機構(500)とを備えたハイブリッド車両は、ロック機構が固定変速モードから無段変速モードへ変速モードを切り替え可能な正常状態にあるか否かを判別する判別手段(100)と、ロック機構が正常状態にないと判別され且つ変速モードとして固定変速モードが選択されるフェールセーフ要求期間において、第2電動発電機の電力回生量をロック機構が正常状態にある場合と較べて増加側へ補正する補正手段(100)とを具備する。
(もっと読む)
車両挙動制御装置
【課題】 センサ類に故障が生じた場合においても、過大な目標制御量の出力を抑制できるようにした車両挙動制御装置を提供する。
【解決手段】 制御量ベース値Dbaseの絶対値|Dbase|が配分トルクリミット値Tdlimを継続して超え、ステップS29の判定がYesとなった場合、ATTS−ECU16は、ステップS30で配分トルクリミット値Tdlimを目標制御量Dtgtとして処理を終了する。なお、この際、制御量ベース値Dbaseの値が負であった場合には、トルクリミット値Tdlimに−1を乗じることによって、目標制御量Dtgtの符号を制御量ベース値Dbaseに一致させる。
(もっと読む)
電気自動車の制御装置
【課題】ブレーキセンサに異常が発生した場合において、電気自動車のクリープ走行性能を確保する。
【解決手段】低車速領域においてアクセル操作量が0%となる場合には目標クリープトルクが設定され、この目標クリープトルクに向けてモータジェネレータが制御される。また、目標クリープトルクはブレーキペダルの踏み込みに応じて引き下げられ、車両制動時におけるモータジェネレータの発熱等が抑制される。このように、ブレーキ操作量に応じて目標クリープトルクを変化させる電気自動車において、ブレーキ操作量を検出するブレーキセンサに異常が発生した場合には(ステップS11)、ブレーキ操作量に拘わらず予め設定された規定クリープトルクが目標クリープトルクとして採用される(ステップS15)。この規定クリープトルクは、クリープ走行性能を確保するために必要な大きさに設定されている。
(もっと読む)
作業機
【課題】安価で制御性に優れる無段変速機構を備えた作業機を提供する。
【解決手段】田植機1は、エンジン2と、クラッチ出力軸36と、エンジンクラッチ35と、電動モータ22と、後車輪21と、差動装置23と、制御部と、を備える。クラッチ出力軸36は、エンジン2の駆動力を伝達する。エンジンクラッチ35は、エンジン2とクラッチ出力軸36との間に配置される。差動装置23は、クラッチ出力軸36からの出力と前記電動モータ22の出力との差動動力を後車輪21に出力する。制御部は、電動モータ22の回転速度及びエンジンクラッチ35の作動を制御する。そして、機体の前進時において、制御部は、クラッチ出力軸36からの出力を打ち消す方向にのみ電動モータ22を回転駆動することで、後車輪21への出力の変速を行う。
(もっと読む)
車両運動制御装置
【課題】車両挙動を制御する複数のデバイスが共有するセンサの故障時における車両挙動の安定化を実現する。
【解決手段】CANを介して車両制御を行うデバイス1・デバイス2・デバイス3と、ヨーレートセンサ4とが接続され、各デバイスはそれぞれの運動制御にヨーレート検出値を用いる。ヨーレートセンサの故障を例えばデバイス3が検知した場合には、他のデバイス2・3がその故障を検知していない場合でも、ゲインを低減する。1つのデバイスの制御停止により残りのデバイスがそれを補うために制御量を大きくして車両挙動に悪影響を及ぼしてしまう場合でも、ゲインの低下により、その影響を小さくすることができ、車両運動の安定化を保持できる。また、残りのデバイスにおいてもセンサ故障が確定して制御停止に移行する場合にも、小さなゲインにより制御量を下げておいた状態から機能停止することができるため、車両挙動の急変を抑制することができる。
(もっと読む)
1 - 10 / 79
[ Back to top ]