
国際特許分類[B62D117/00]の内容
国際特許分類[B62D117/00]に分類される特許
521 - 524 / 524
駐車支援システムおよび駐車支援または自動駐車を行う方法
ドライバーが自動駐車または駐車支援のためにステアリング介入制御を要求できる、駐車アシスタント装置およびステアリングアクチュエータを備えた車両の駐車支援または自動駐車を行う駐車支援システムに関する。本発明によれば、ドライバーの側からこの要求があったとき、関連するシステム機能の確実性検査が行われ、少なくとも、駐車アシスタント装置の制御装置にエラーがないか、ステアリングアクチュエータの制御装置にエラーがないか、2つの制御装置間の通信にエラーがないか、および、自動ステアリング介入制御が要求されたか否かが検査され、これらの条件が満足されない場合には要求されたステアリング介入制御が行われない。  (もっと読む)
(もっと読む)
自動車の操舵車輪の操舵支援方法及び操舵支援装置
本発明は、自動車(1)の操舵車輪(3、4)の操舵支援方法及び操舵支援装置に関する。本発明の自動車(1)の操舵車輪(3、4)の操舵支援方法及び操舵支援装置は、自動車(1)の運転者によるステアリングホイール(8)の操作に対する自動車(1)の応答時間を短縮するために、ステアリングホイール(8)とラック部品(14)との間に、位相進度が適用されることを特徴とする。
 (もっと読む)
(もっと読む)
車両を安定化させる際に車両操作者を支援するための方法及び装置
この発明は、目標操舵角と瞬間的な操舵角の間の偏差に応じて決まる追加操舵トルクを車両の操舵系統に加える形で、車両の操舵可能な車輪の目標操舵角を調節して、車両を安定化させる際に車両操作者を支援する方法に関する。この方法は、車両の操舵系統に作用する負荷モーメントの値を見積もることと、この負荷モーメントに関する見積値に応じて、追加操舵トルクを算出することとを特徴とする。更に、この発明は、この方法を実施するのに適した装置に関する。  (もっと読む)
(もっと読む)
自動車内における運転者の負荷を調整するための方法及び装置
本発明は、自動車を運転中の運転者の負荷を調整するための方法であって、負荷の値がセンサによって記録された運転者の生理的データから決定される方法、及び前記方法を実行するための装置に関する。本発明によれば、運転者の負荷、すなわち、運転負荷は、最適な運転負荷範囲に維持され、又は前記最適な範囲から外れたときには、そこに戻され、これによって、運転者の最適な動作能レベル又は注意レベルを保証する。すなわち、車両システムは、決定された運転負荷値に依存して制御され、これによって、運転者は、視覚的、聴覚的、又は触知的センサによって、前記運転者の運転負荷値が最適な運転負荷範囲内の値に維持される。 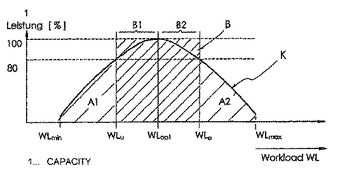 (もっと読む)
(もっと読む)
521 - 524 / 524
[ Back to top ]