
国際特許分類[F16H59/16]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 回転運動を伝達するための変速あるいは逆転伝動装置のための制御入力 (10,329) | 入力がトルクまたはトルク要求に関するもの (1,958) | トルクの動力測定 (64)
国際特許分類[F16H59/16]に分類される特許
1 - 10 / 64
トルク推定装置及びトルク推定方法
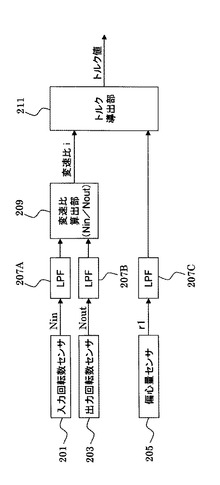
【課題】偏心量に対する変速比の特性が幾何学的に非線形な無段変速機における入力トルク及び/又は出力トルクを高い精度で推定するトルク推定装置を提供すること。
【解決手段】四節リンク機構式の無段変速機におけるトルクを推定するトルク推定装置は、動力源からの回転動力による無段変速機の入力側の回転数である入力回転数と、無段変速機の出力側の回転数である出力回転数と、無段変速機に設定されている偏心量とに基づいて、無段変速機の変速比毎に異なるトルクと偏心量の関係から、無段変速機に入力されるトルクである入力トルク及び/又は無段変速機が出力するトルクである出力トルクを推定する。
(もっと読む)
無段変速機の変速制御装置及びその変速制御方法

【課題】駆動ベルトの伸びを考慮した場合にセカンダリプーリの推力が必要以上に高く設定されることを防止する。
【解決手段】本発明は、無段変速機の変速制御装置であって、駆動力伝達部材13の伸びによる各プーリ11、12の回転速度比の変化量を推定する回転速度比変化量推定手段S3と、入力トルクと回転速度比の変化量とに基づいて、伸び無しプーリ比を推定する伸び無しプーリ比推定手段S4と、入力トルクと伸び無しプーリ比とに基づいて、セカンダリ推力を演算するセカンダリ推力演算手段S5と、駆動力伝達部材13の伸びによるセカンダリプーリ12と駆動力伝達部材13との接触半径の変化量を推定する接触半径変化量推定手段S6と、セカンダリ推力を接触半径の変化量に基づいて補正し、補正後セカンダリ推力を演算する補正後セカンダリ推力演算手段S8と、補正後セカンダリ推力に基づいて推力を制御する推力制御手段S9と、を備える。
(もっと読む)
変速制御装置
【課題】変速プロセスにおいて、油圧制御が十分に応答できるように、回生トルク変動を規制することができる変速制御装置の提供。
【解決手段】駆動力源制御ユニットによってトルク出力が制御される回転電機から入力部材に入力される正トルク及び負トルクを算定する入力トルク算定部65と、負トルクの負方向への増加量を制限する負トルク増加量制限値を設定する負トルク制限値設定部64と、変速プロセスの間に入力トルク算定部65によって負トルクが算定された場合、回転電機が負トルク増加量制限値によって制限されたトルクを出力するように駆動力源制御ユニットに対してトルク出力制限指令を与える変速時トルク管理部63とを備える。
(もっと読む)
車両用自動変速機の制御装置
【課題】デファレンシャルギヤの焼き付きを防止すると共に、車輪スリップ解消時の不要なエンジンブレーキによる減速感を回避できる車両用自動変速機の制御装置を提供する。
【解決手段】スリップ判定中は自動変速機の少なくともアップシフトを禁止するスリップ制御手段と、登坂判定中は自動変速機のアップシフトを禁止する登坂制御手段と、を備えた車両用自動変速機において、スリップ判定の解除から所定時間経過後まで、登坂制御手段による登坂判定を禁止する登坂判定禁止手段を設ける。低μ路で車輪スリップが発生した後で高μ路に差しかかった時に、登坂路と誤判定するのを防止でき、不要なエンジンブレーキによる不快な減速感を解消できる。
(もっと読む)
変速機の制御装置および制御方法
【課題】変速機内の同一軸上に複数の回転速度センサを設けることなく、変速機に入力されるトルクを精度よく算出する。
【解決手段】ECUは、変速機の入力軸と出力軸とが直結状態(変速比=1)であるという条件を含む初期処理の実行条件が成立すると(S100にてYES)、初期条件成立時の入力軸回転速度センサからのパルス信号および出力軸回転速度センサからのパルス信号に基づいて、直結状態かつ入力トルクが0である時の両パルス信号の位相差を表わす初期位相差Δtを算出し(S102)、その後に直結状態が保持されていると(S104にてYES)、両パルス信号の実際の位相差tから初期位相差Δtを減じた値を捩れ位相差taとして算出し(S106)、捩れ位相差taに対応する入力トルクTを、捩れ位相差と入力トルクとの関係を予め記憶した捩れマップを用いて算出する(S108)。
(もっと読む)
自動変速機の制御装置
【課題】ディッシュプレートを備えた摩擦締結要素を滑らかに締結可能な自動変速機の制御装置を提供すること。
【解決手段】摩擦板とピストンとの間に介在する皿バネ状のディッシュプレートを備えた摩擦締結要素を締結制御するにあたり、摩擦板の締結の進行状態が目標の進行状態となるように、前記ピストンに作用させる油圧を少なくとも積分項を用いたフィードバック制御を行うフィードバックループとは異なる制御ループに、摩擦材の締結の進行状態が後半の領域よりも前半の領域の方が大きい所定の油圧を加算する加算手段を設けた。
(もっと読む)
無段変速機及びその制御方法
【課題】副変速機付き無段変速機においてベルト滑りを防止する。
【解決手段】本発明は、供給油圧に応じて変速比を無段階に変更することができる無段変速機構と、前進用変速段として第1変速段と第1変速段よりも変速比の小さい第2変速段とを含む副変速機構とを備え、副変速機構の変速時に、無段変速機構の変速比を副変速機構の変速と逆方向に制御し、エンジンから無段変速機構に入力される入力トルクに基づいて各プーリと巻き掛け部材との接触摩擦力を維持するために必要な油圧である必要油圧を演算し、必要油圧に基づいて無段変速機構に油圧を供給し、副変速機構の変速時に、副変速機構から無段変速機構に入力されるイナーシャトルクを推定する(S2)無段変速機において、副変速機構の変速時には、入力トルクとイナーシャトルクとに基づいて必要油圧を演算する(S9、S10)。
(もっと読む)
Vベルト式無段変速機搭載車のベルトスリップ時駆動力制御装置
【課題】ベルトスリップ制御時における駆動力低下を補償し得るようにした動力源出力トルク制御を提案する。
【解決手段】演算部51ではエンジン性能マップを基に、エンジン回転数Neおよびアクセル開度APOから要求エンジントルクTe*を求める。除算器52ではプーリ回転比λをベルト巻き付き半径比iで除算することにより除算値(λ/i)を求める。λはベルトスリップ制御中も変速制御により目標変速比に保たれるが、iはベルトスリップ分だけ低下する。非ベルトスリップ中はiが低下せず、i=λのため、除算値(λ/i)は1であり、ベルトスリップ制御中はiの上記低下により、除算値(λ/i)は1よりも大きな値となる。乗算器53では、要求エンジントルクTe*に除算値(λ/i)を掛けて目標エンジントルクtTeを求め、これをエンジンの出力制御に資する。よって、ベルトスリップ制御中はエンジントルクが(λ/i)>1により増大され、ベルトスリップ制御時における駆動力低下を補償し得る。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置において、キックダウン時において電動機接続状態を適切に切り替えること。
【解決手段】この装置は、電動機出力軸の接続状態を、変速機の入力軸と電動機出力軸との間で動力伝達系統が形成される「IN接続状態」、変速機出力軸と電動機出力軸との間で動力伝達系統が形成される「OUT接続状態」、並びに、いずれの間にも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構を備える。キックダウン条件が成立すると(t1)、先ず、電動機接続状態をOUT接続状態に切り替える切り替え作動がなされる(t2〜t3)。その後、変速機減速比を増大する変速作動がなされる(t4〜t5)。キックダウン条件成立後、E/G側出力トルクTeとM/G側出力トルクTmとの和Tsが増大し続けるようにTeとTmが調整される(t1〜t4)。
(もっと読む)
車両の制御装置および制御方法
【課題】車両の発進時におけるロックアップクラッチのスリップ制御において目標スリップ回転数への追従性の悪化を抑制する。
【解決手段】ECUは、車両の走行状態がスリップ制御領域に対応すると判定すると(S100にてYES)、目標スリップ回転数を算出するステップ(S102)と、目標スリップ回転数と実スリップ回転数との差を算出するステップ(S104)と、実スリップ回転数が目標スリップ回転数に一致するようにロックアップクラッチを制御するステップ(S106)と、算出された差の絶対値が予め定められた値よりも大きいと(S108にてYES)、実スリップ回転数が目標スリップ回転数に一致するように変速比制御を実行するステップ(S110)とを含む、プログラムを実行する。
(もっと読む)
1 - 10 / 64
[ Back to top ]