
国際特許分類[G01C21/24]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 宇宙航行に特に適合するもの (15)
国際特許分類[G01C21/24]に分類される特許
11 - 15 / 15
衛星ナビゲーションのための方法及びシステム
【課題】衛星ナビゲーションのためのシステム及び方法を提供する。
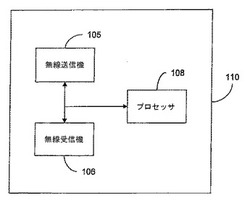
【解決手段】一実施形態では、衛星ナビゲーション・システム用のモバイル・ユニットが開示される。このモバイル・ユニットは、衛星ビークルへ要求無線信号を送信する手段と、1又は複数の衛星ビークルの軌道座標を含む応答無線信号を受信する手段と、要求無線信号を送信する手段と応答無線信号を受信する手段とに応答するものであり、送信された要求無線信号と受信された応答無線信号とに基づいて到来時間差レンジを計算することにより、衛星ビークルまでのレンジを計算する手段と、レンジを計算する手段に応答するものであり、少なくとも3つの衛星ビークルまでのレンジと少なくとも3つの衛星ビークルの軌道座標とに基づいて位置を計算する手段とを備える。
(もっと読む)
動的なCMGアレイおよび方法
コントロール・モーメント・ジャイロ(CMG)(10)の故障、あるいはスペースクラフト(S/C)質量特性またはミッションの変更を補償するようにCMG(10)を姿勢変更するための方法および装置が提供される。改良型のCMG(10)は、CMG(10)をCMGジンバル軸と平行でない軸(18)のまわりで回転させるための駆動手段を備える。CMGアレイ姿勢変更中を除いて、解除可能なクランプが、CMG(10)をスペースクラフトに固定する。CMGアレイ(50)は、姿勢センサ(102)、コマンドモジュール(104)、データおよびプログラムを格納するためのメモリ(108)、(好ましくは各CMG軸(18、22、30)ごとの)CMG駆動装置(112)およびセンサ(114)、ならびにこれらの要素を結合する制御装置(116)と組み合わされる。この方法は、CMG(10)が故障し、あるいはS/C特性またはミッションが変化したかどうか決定するステップ、アレイの作動中のCMG(10)を識別するステップ、スペースクラフト制御の向上のために新しいアレイ姿勢変更を決定するステップ、アレイのCMG(10)を解除し、姿勢変更し、再び固定するステップ、および新しいアレイ姿勢のためにS/C制御パラメータを更新するステップを備える。 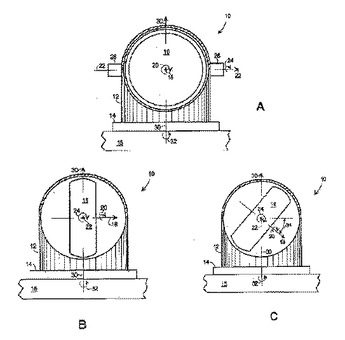 (もっと読む)
(もっと読む)
軌道パラメータ算出プログラム

【課題】 観測センサ条件や観測運用要求を考慮して軌道パラメータの算出を行うことが可能な軌道パラメータ算出プログラムを提供することである。
【解決手段】 本発明の軌道パラメータ算出プログラムは、指定された軌道高度範囲に基づいて、太陽同期条件を満たす準回帰軌道パラメータを算出し、それらをコンピュータの記憶手段に格納する機能(11、12、13、14)と、前記準回帰パラメータを用いて前記地球観測衛星の軌道を決定する機能(15)とを備える。
(もっと読む)
恒星センサ
【課題】 人工衛星等の飛翔体に搭載されて恒星の位置を検出するための恒星センサにおいて、星の等級にかかわらず星の位置の高い算出精度を得る。
【解決手段】 CCD1は星を撮影しその光信号を電気信号に変換する。ゲインコントローラ4は電気信号から抽出された画像信号のレベルがいずれの星についても一定となるように星の等級情報に応じて増幅する。星位置算出回路8は画像信号に基づいて星の位置を求める。星検出/決定回路9は星位置算出回路が算出した星の位置に基づいてトラッキングし飛翔体の姿勢制御のために使用する星を検出し決定するとともに、決定した星の等級を星のカタログデータにより検出して等級情報を前記ゲインコントローラへ出力する。星同定回路10は星検出/決定回路が決定した星の位置情報を飛翔体の姿勢決定系へ出力する。
(もっと読む)
スター・スキャナ
11 - 15 / 15
[ Back to top ]