
国際特許分類[G01C21/34]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 経路探索;経路案内 (1,122)
国際特許分類[G01C21/34]の下位に属する分類
車載コンピュータの入出力装置 (438)
国際特許分類[G01C21/34]に分類される特許
681 - 684 / 684
高速且つ正確な経路プランニングのための方法及びシステム
システム(200)は、あらゆる種類の経路プランニングアプリケーションについて最適な経路を生成する方法(130〜180)を実行する。動作において、システム(200)は、1又はそれ以上のパラメータによって特徴付けられる複数の状態を有する離散化された配置空間を表す配置空間ノード構造を構成し、配置空間ノード構造の各ノードを明示的に定量化する離散パラメータ値により及び/又は離散化された配置空間の自由空間領域を通る探索ガイドを表すヒューリスティック値により、配置空間ノード構造を増補する。 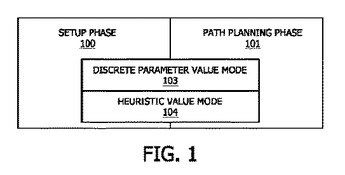 (もっと読む)
(もっと読む)
可聴情報に関連する地図情報を変更するナビゲーション装置及び方法
ナビゲーション装置を介してユーザへと地図情報を提供する方法及び装置が開示される。少なくとも1つの実施形態においてこの方法は、少なくとも1つのアイコンと所望の目的地への経路とを含む地図情報を表示する工程と、経路に関連する可聴情報を生成する工程と、可聴情報が少なくとも1つのアイコンに関連する場合、表示される少なくとも1つのアイコンを変更する工程と、を含む。少なくとも1つの実施形態において、ユーザへと地図情報を提供するナビゲーション装置が開示される。このナビゲーション装置は、少なくとも1つのアイコンと所望の目的地への経路とを含む地図情報を表示する表示装置と、経路に関連する可聴情報を生成する出力装置と、可聴情報が少なくとも1つのアイコンに関連する場合、表示される1つのアイコンを変更するプロセッサと、を備える。  (もっと読む)
(もっと読む)
目的地への車両の運転計画を修正するための方法およびシステム

所望の目的地への運転前および/または運転中に車両の運転計画、特に、そのような計画の運転/休憩スケジュールを修正する方法およびシステムは、(a)前記ドライバの機敏さのレベルの発現を予測する(14)段階と、(b)前記予測された発現が、所定のスレショルド・レベル以下になり、そのような時点を高リスク段階として分類し注釈付けする段階(50)と、(c)前記高リスク段階を、前記運転計画または運転/休憩スケジュールと比較し(51)、前記目的地または次の計画された停車場所もしくは休憩場所に達する前に高リスク段階(tx)が生じるかどうかを判定する(52)段階と、(d1)前記目的地または次の計画された停車場所もしくは休憩場所に達する前に高リスク段階(tx)が生じる場合に、修正された運転計画または運転/休憩スケジュールを、停車または休憩が前記次の高リスク段階前または高リスク段階時に行われるように計算する(22)段階とを含む。 (もっと読む)
経路報酬の増大
ユーザーが異なる経路をとるための異なる動機をユーザーに提供することができる。ユーザーの特定の状況に関連する情報を収集することができ、報酬を経路に関連付けることができる。ユーザーは意図した目的地を入力することができ、異なる経路をとることができ、経路は様々な特性を有する。経路は分析することができ、特定の経路をとるユーザーにどの経路を関連付けることができるかについて決定をすることができる。一般に、異なる会社は、ユーザーがそれらの会社の広告を通過するか又はそれらの会社の店で立ち寄るように報酬を供給することができる。  (もっと読む)
(もっと読む)
681 - 684 / 684
[ Back to top ]