
国際特許分類[G01P13/04]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | 運動の有無または方向の指示または記録 (382) | 方向だけの指示,例.風見板によるもの (105) | 直線運動の正方向または逆方向の指示,または回転運動の右廻りまたは左廻りの指示 (67)
国際特許分類[G01P13/04]に分類される特許
1 - 10 / 67
人体検知装置及び該人体検知装置を備えた画像処理装置
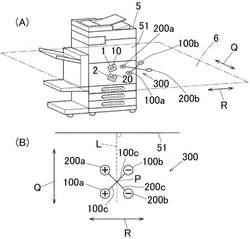
【課題】人の接近を高精度に判定することができる人体検知装置等を提供する。
【解決手段】それぞれ一対の正負電極10a,10b,20a,20bを有する第1及び第2の焦電型センサ10,20と、各焦電型センサを被覆するレンズ3を備える。垂直状被取付面51に対して直交する面からなる検知エリア6において、第1の焦電型センサの正負電極に対応する第1の正極視野100aと負極視野100b、第2の焦電型センサの正負電極に対応する第2の正極視野200aと負極視野200bを含む検知ブロック300、301が、第1の正極視野と負極視野を結ぶ仮想線100cまたはその延長線と、第2の正極視野と負極視野を結ぶ仮想線200cまたはその延長線が交差する態様で形成されている。交点から被取付面51への垂線について、各仮想線同士が線対称に形成されている。
(もっと読む)
気圧センサを用いて昇降移動状態を推定する携帯装置、プログラム及び方法

【課題】携帯装置に搭載された気圧センサを用いて、利用者の昇降状態をできる限り高い精度で推定することができる携帯装置等を提供する。
【解決手段】昇降状態毎に、その昇降状態時における気圧変化速度に基づく平均vu ̄及び分散σu2を予め記憶した気圧変化記憶手段113と、気圧センサ101によって計測された時間経過に伴う気圧値について、所定時間範囲に所定閾値以上で変化したか否かを検出する気圧変化検出手段111と、気圧変化検出手段によって真と判定された際、当該気圧値における気圧変化速度vを算出する気圧変化速度算出手段112と、気圧変化記憶手段に記憶された平均vu ̄及び分散σu2を用いて、昇降状態毎に、気圧変化速度vにおける正規確率分布を算出し、最も高い確率値となる昇降状態を、当該昇降状態として推定する昇降状態推定手段114とを有する。
(もっと読む)
エンコーダホイール、ロータリエンコーダ、及び回転方向検出方法
【課題】本発明は、磁気式であっても、速度検出の精度を保ったまま、1つのセンサで回転方向を検出することのできるエンコーダホイール、ロータリエンコーダ、及び回転方向検出方法を提供する。
【解決手段】回転体の回転を検出するための磁気センサを備えて前記回転体の回転に対応したパルスを出力するロータリエンコーダのエンコーダホイール10において、前記磁気センサが対向したときに、高い電圧の前記パルスが出力されるアクティブ部1と、前記パルスが出力されないインアクティブ部2とが円周方向にそれぞれ複数配列された磁気パターンを有し、前記アクティブ部1の各々は、前記円周方向に略同幅に形成され、前記インアクティブ部2は、前記円周方向に幅の異なる第1インアクティブ部3、及び第2の幅で形成された第2インアクティブ部4を含み、回転方向により、前記アクティブ部1が前記磁気センサと対向するタイミングが異なるようにした。
(もっと読む)
回転方向検出装置および回転方向検出方法
【課題】 自己発電によって、発電部が有する回転子の回転方向を正確に検出することができる回転方向検出装置および回転方向検出方法を提供すること。
【解決手段】 回転方向検出装置1は、固定子および回転子を有し、固定子に対して回転子が回転することにより交流電圧を発生する発電部2と、回転子を固定子に対して第1方向またはそれと逆の第2方向に回転させる回転手段3と、発電部2から発生した電圧により駆動し、回転子の回転方向を検出する検出部7とを有している。検出部7は、その駆動を開始した時刻から所定時間が経過した時刻における発電部2から発生する電力の電圧値を検知し、検知した電圧値の大きさに基づいて、固定子に対する回転子の回転方向を検出する。
(もっと読む)
車輪位置検出装置およびそれを備えたタイヤ空気圧検出装置
【課題】正確に車輪位置の特定が行えるようにする。
【解決手段】受信アンテナでフレームを受信したときの受信レベルに対応したRSSI値を求めつつ、受信レベルとして想定される範囲の全域において受信レベルが大きくなるほどRSSI値が大きくなるような出力とはせず、RSSI値を飽和させる。このようにすれば、受信アンテナから近い両後輪の送信機の送信フレームのRSSI値は飽和して一定値となり、遠い両前輪の送信機の送信フレームのRSSI値は部分的に飽和するものの基本的には変動するため、RSSI値が一定値かそれとも差があるかにより前後輪の特定ができる。また、各送信機からの送信フレームに格納された回転方向情報に基づいて、左右輪の特定ができる。これにより、4輪すべてを特定できる。
(もっと読む)
回転方向検出装置および回転方向検出方法
【課題】自己発電によって、発電部が有する回転子の回転方向を正確に検出することができる回転方向検出装置および回転方向検出方法を提供すること。
【解決手段】回転方向検出装置1は、回転子が固定子に対して回転することにより交流電圧が発生する発電部2と、前記回転子を前記固定子に対して第1方向または前記第1方向と逆の第2方向に回転させる回転手段3と、発電部2から発生した電圧により作動し、前記回転子の前記固定子に対する回転方向を検出する検出部7とを有している。検出部7は、前記回転子を前記固定子に対して前記第1方向へ回転させたときに発電部2から発生する第1電圧が予め設定された閾値以上に上昇する回数と、前記第2方向へ回転させたときに発電部2から発生する第2電圧が前記閾値以上に上昇する回数との違いに基づいて、前記固定子に対する前記回転子の回転方向を検出する。
(もっと読む)
回転方向検出装置および回転方向検出方法
【課題】 自己発電によって、発電部が有する回転子の回転方向を正確に検出することができる回転方向検出装置および回転方向検出方法を提供すること。
【解決手段】固定子および該固定子に対して回転可能な回転子を有し、前記固定子に対して前記回転子が回転することにより交流電力を発生する発電部2と、前記回転子を前記固定子に対して第1方向または前記第1方向と逆の第2方向に回転させる回転手段3と、発電部2から発生した電力により駆動し、前記回転子の前記固定子に対する回転方向を検出する検出部7とを有している。回転手段3は、前記回転子を前記第1方向へ回転させたときの発電部2の発電量と、前記第2方向へ回転させたときの発電部2の発電量とが異なるように前記回転子を回転させる。また、検出部7は、発電部2の発電量に基づいて、前記固定子に対する前記回転子の回転方向を検出する。
(もっと読む)
回転方向検出機能付き回転数センサ
【課題】本発明は、回転数を検出することができるとともに、回転方向も検出することができる回転方向検出機能付き回転数センサを提供することを目的とするものである。
【解決手段】本発明の回転方向検出機能付き回転数センサは、第1の比較器36から得られる出力パルス信号の立ち上がりエッジ時点での第2の比較器37から出力される出力パルスレベルと、第1の比較器36から得られる出力パルス信号の立ち下がりエッジ時点での第2の比較器37から出力される出力パルスレベルとを比較する回転方向検出用比較器を設ける構成としたものである。
(もっと読む)
車両用制御装置
【課題】横加速度の向きとヨーレートの向きを利用して車両の前進または後退を精度良く判定する。
【解決手段】車両用制御装置は、横加速度ayとヨーレートωとに基づいて車両の前進・後退を判定する進行方向判定手段24と、横加速度ayと基準値との偏差である横加速度変動量Δayを算出する変動量算出手段23と、転舵速度算出手段22とを備える。進行方向判定手段24は、ステアリングを左に操舵するときの転舵速度Δθの符号と、安定して左旋回しているときに作用する横加速度ayの符号を正と規定し、ステアリングを右に操舵するときの転舵速度Δθの符号と、安定して右旋回しているときに作用する横加速度ayの符号を負と規定したとき、横加速度変動量Δayの絶対値が第1の所定値以上であり、かつ、横加速度変動量Δayおよび転舵速度Δθのうち、一方が正であり、他方が負であるとき、車両が前進しているという判定を行わないように構成される。
(もっと読む)
車両用制御装置
【課題】車両の前進または後退を精度良く判定することができる車両用制御装置を提供することを目的とする。
【解決手段】車両用制御装置は、車両の前進または後退を判定する進行方向判定手段22を備える。前記進行方向判定手段22は、ステアリングを左に操舵したときの操舵角の値(操舵角センサ92の出力値)の符号と、車両が安定して左旋回しているときに作用する横加速度の値(横加速度センサ93の出力値)の符号を第1の符号(正)と規定し、ステアリングを右に操舵したときの操舵角の値の符号と、車両が安定して右旋回しているときに作用する横加速度の値の符号を第2の符号(負)と規定したとき、ステアリングが操作されてから所定時間内に、操舵角の値および横加速度の値のうち、一方が第1の符号であり、他方が第2の符号であるとき、車両が後退していると判定する。
(もっと読む)
1 - 10 / 67
[ Back to top ]