
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
3,071 - 3,080 / 7,349
走行制御装置、及び走行制御方法
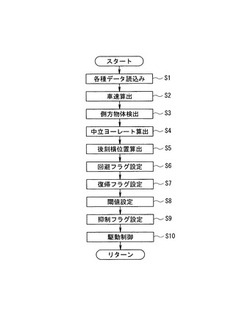
【課題】前方の障害物などを操舵回避する際の、無用な制御介入を制限する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定の閾値XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方車両の側とは逆方向に横移動することを検知したら回避フラグをFa=1にセットし(ステップS6)、その後、今度は側方車両の側に横移動を開始したら復帰フラグをFr=1にセットする(ステップS7)。こうして復帰フラッグがFr=1にセットされたら、設定時間Tmが経過するまで抑制フラグをF=0にリセットし、横移動の抑制を禁止する(ステップS9)。
(もっと読む)
情報出力規制装置、車載装置、情報出力システム、コンピュータプログラム及び情報出力規制方法

【課題】運転者への操作負担の軽減及び閲覧の効率を向上させることができる情報出力規制装置、車載装置、情報出力システム、コンピュータプログラム及び情報出力規制方法を提供する。
【解決手段】構造化文書を読込み(S101)、読込んだ構造化文書に記述されたリンク情報が示すリンク先に格納されている閲覧データを読込み(S105)、読込んだ閲覧データが走行中の車両内で閲覧可能な属性を有するか否かを判定し(S106)、閲覧データが走行中の車両内で閲覧可能な属性を有していないと判定した場合(S106でNO)、閲覧データに基づく情報を出力させないための規制情報を閲覧データに付加するようにしてある(S107)。
(もっと読む)
物体検出装置
【課題】 レーダを用いた物体検出において物体を正確に検出する物体検出装置を提供する。
【解決手段】 本発明に係る物体検出装置1の物体検出部4は、複数の検出点データから一つの物体に対応する複数の検出点データをグルーピングするグルーピング手段41と、グルーピング手段によりグルーピングされた検出点データに対応する画像部分から、検出対象物体の所定の一部分を探索して検出する部分探索手段42と、レーダ検出部から、部分探索手段により検出された一部分の両端へ延びる2本の直線を算出する直線算出手段43と、グルーピング手段によりグルーピングされた検出点データのうち、直線算出手段により算出された2本の直線よりも内側の検出点データを、検出対象物体の一部分に対応する検出点データとして抽出する検出点抽出手段44とを有する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】車速を所望の車速に収束させることが困難であるとともに過度に加減速が繰り返されてスムーズに走行することができない。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間を前記目標車速で走行するために前記自車両を前記目標車速とすべき目標地点に到達する前に前記自車両の変速比を前記加速変速比に設定させ、前記目標地点から前記所定区間の終了地点まで前記自車両の車速が前記目標車速以下となるように制御するとともに、前記目標地点に到達する前に前記自車両の車速が前記目標車速と一致した場合に、当該一致した一致地点から前記所定区間の終了地点まで前記自車両の車速が前記目標車速以下となるように制御する。
(もっと読む)
車両の運転支援装置
【課題】交差点における対向車両の発進を適切に判断し、不要な警報や制御介入を防止する。
【解決手段】交差点で対向車両がいない場合、自車両が交差点を直進或いは左折する場合、対向車両の位置が右折専用レーン或いは左折専用レーンである場合、対向車両のウィンカ或いはハザードランプが点滅している場合、駐車灯が点灯している場合、自車両側の信号機が右折可である場合、対向車両側の信号機が赤である場合、対向車両側の交差点の先の道路が渋滞している場合には、対向車両の発進予測処理を中止し(S16)、それ以外は、対向車両の発進予測処理を実行する(S15)。そして、障害物の衝突リスクを演算して衝突の可能性があるか否かを調べ(S18)、衝突の可能性がある場合、警報出力や自動ブレーキ・操舵等の運転支援制御を実行し(S19)、安全を確保する。
(もっと読む)
走行支援装置
【課題】レーンマーカ等の道路情報を検出できない道路でも該道路情報を検出できる道路でも、周辺車両との接触の危険性を判断し、適切なタイミングで適切な対処を行う衝突防止支援装置を提供すること。
【解決手段】自車両と周辺に存在する周辺走行車両を検出する第1のセンサと、道路上のレーンマーカを検出する第2のセンサと、前記自車両と前記周辺走行車両との位置関係を算出する第1の算出部と、前記位置関係に基づいて、前記周辺走行車両が前記自車両に衝突する確率の分布を示す危険度を算出する第2の算出部と、前記危険度に基づいて、制御閾値を設定する設定部と、前記第2のセンサが前記レーンマーカを検出していない場合は、自車両と周辺走行車両との位置関係に基づいて制御閾値を設定し、前記第2のセンサが前記レーンマーカを検出している場合には、当該レーンマーカ及び前記位置関係に基づいて前記制御閾値を設定する設定部を備えること。
(もっと読む)
車両用警報表示制御装置
【課題】 警報表示装置によって行った警報表示にドライバが視線を移動させた後、視線の復帰を促したい場合に、速やかに視線復帰を行わせることができる車両用警報表示制御装置を提供する。
【解決手段】 警報処理ECU6は、走路認識ECU2から送信される走行路情報および車両挙動センサ5から送信される車両挙動情報に基づいて、警報を発生するか否かを判断する。ここで、警報を発生する場合、走行目標点ズレ量を算出し、走行目標点ズレ量に基づいて表示視認余裕時間を求める。警報処理ECU6は、表示視認余裕時間が経過するまで、第1レベルの警報として警報ランプを点滅状態とする。また、表示視認余裕時間が経過した後は、第2レベルの警報として警報ランプを点灯状態とする。
(もっと読む)
車載用ナビゲーション装置及び交差点進入案内方法
【課題】信号機が設置されていない交差点において適切な走行案内をすることが可能な「車載用ナビゲーション装置及び交差点進入案内方法」を提供すること。
【解決手段】車載用ナビゲーション装置は、情報出力手段と、地図データが格納された記憶手段と、位置検出手段と、撮像手段と、少なくとも位置検出手段により検出された自車両の位置及び前記地図データ、又は撮像手段により撮像された画像データを基に予め進入優先順位が定められた交差点を検出する(S11)制御手段とを有する。制御手段は、撮像手段により交差点に進入する車両を捕捉し(S13)、車両の交差点への進入順位を推定(S14)して情報出力手段に情報出力させ(S15)、自車両の進入順位になったときに交差点への進入を促す(S19)。制御手段は、撮像装置で撮像した画像を解析して車両から交差点までの距離を検出し、距離の短い順に優先順位を付与する。
(もっと読む)
車両の走行安全装置
【課題】物体を検出すると共に、物体の自車に対する位置関係に応じて接触の可能性を的確に判定するようにした車両の走行安全装置を提供する。
【解決手段】自車の周辺に送信した電磁波の反射に基づいて物体を検出すると共に、物体との相対距離と相対速度からなる相対関係と、物体を回避するのに必要なステアリング回避量を算出し、それら算出値からブレーキ作動距離と警報作動距離を算出し、相対距離が作動距離未満のときに接触の可能性があると判定して接触回避支援手段を作動させる(S10からS34)車両の走行安全装置において、物体100の反射点の配列に応じて回避所要時間を減少補正し、接触の可能性があると判定し難くさせる(S16)。
(もっと読む)
車両の走行安全装置
【課題】道路鋲などの走行の支障とならない静止物体を精度良く判定し、それとの接触回避動作を抑制して警報過多防止と的確な接触回避とを良く両立させるようにした車両の走行安全装置を提供する。
【解決手段】自車の周辺に送信した電磁波の反射波に基づいて物体を検出し、自車と物体との接触の可能性の有無を判定して、その可能性があると判定された場合、接触回避を支援する接触回避支援手段を作動させる車両の走行安全装置において、物体が静止物体か否か判定し(S18)、肯定されると共に、判定された静止物体が複数個存在するとき、静止物体同士の連続性の有無を判定し(S20,S22)、複数個の静止物体の反射レベルLがそれぞれ第1の所定値La以上であり、幅Wがそれぞれ第2の所定値Wb以下であると共に、連続性を有すると判定されるとき、接触の可能性があると判定し難くさせる(S24からS28)。
(もっと読む)
3,071 - 3,080 / 7,349
[ Back to top ]