
国際特許分類[H02P25/06]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 交流電動機の種別または構造的な細部に特徴を有する交流電動機の制御装置または制御方法 (661) | 電動機の種類に特徴のあるもの (646) | リニアモータ (350)
国際特許分類[H02P25/06]に分類される特許
341 - 350 / 350
駆動機構
【課題】、磁性体に供給される信号の極性を制御して、磁性体を被駆動体を駆動させるための駆動源として利用した駆動機構を提供する。
【解決手段】駆動機構は、複数の磁性体を備える組と、この組に周波数信号を供給する手段と、上記磁性体間の吸引―反発による運動を形成する手段と、を備える。この運動が駆動機構の駆動源となる。  (もっと読む)
(もっと読む)
パルス幅変調されるモーター・コントローラの利得エラー相殺のための電力供給変動の抑止
ディスクドライブ・システムのボイスコイルモーター(22)の位置決めドライバ(32)が開示される。パルス幅変調される前段ドライバ(46)が、ボイスコイルモーター(22)を駆動するため「H」ブリッジに配置されるパワー・トランジスタ(50PH、50NH、50PL、50NL)に結合され、電力供給電圧(VM)でバイアスがかけられる。パルス幅変調される前段ドライバ(46)は、エラー増幅器(36)からのエラー信号とランプ・クロック生成器(48)で生成されるランプ・クロック信号(RMP)との比較に従ってパワー・トランジスタ(50PH、50NH、50PL、50NL)を駆動する。ランプ・クロック生成器(48)は、電力供給電圧(VM)の変動に応答してランプ・クロック信号(RMP)の高及び低限界を変調する制御回路を含む。高及び低限界のこの変調が、電力供給電圧(VM)の変動に起因するパワー・トランジスタ(50)の利得の変動を補償する。制御回路は、例えば、一定の周波数を維持するため、電力供給電圧(VM)の変動に従ってランプ・クロック信号(RMP)の勾配も変調し得る。  (もっと読む)
(もっと読む)
デュアルモード・ボイスコイルモーター・コントローラにおけるD級からリニア・オペレーションへの効率的な遷移
ディスクドライブ・システムのボイスコイルモーター(22)のためのデュアルモード位置決めドライバが開示される。リニア前段ドライバ及びパルス幅変調された前段ドライバ(46)は、両方とも、ボイスコイルモーター(22)を駆動するため「H」ブリッジに配置されるパワー・トランジスタ(50PH、50NH、50PL、50NL)に結合される。このため、位置決めドライバは、リニア・モード又はパルス幅変調されたD級モードのいずれかでパワー・トランジスタ(50)を駆動するように作動する。遷移期間において、パルス幅変調されたモードからリニア・モードにスイッチングする間、コンパレータ(56H、56L)は、「H」ブリッジの位相電圧を参照電圧と比較する。コンパレータ(56H、56L)の出力は、位相電圧がそれらのリニア・バイアス点に向かって事前調整されるように、パワー・トランジスタ(50)を駆動するようにPWM出力増幅器(54H、54L)に供給される。その結果、電流ボイスコイルモーター(22)を介する駆動電流の中断は最小限となる。 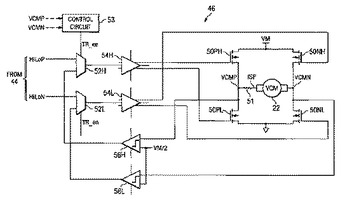 (もっと読む)
(もっと読む)
リニアモータ、リニア圧縮機、リニア圧縮機制御方法、冷却システムとリニア圧縮機制御システム
リニアモータ(10)と、リニア圧縮機(100)と、リニア圧縮機(100)を制御する方法と、冷却システム(20)と、リニア圧縮機(100)をその運転の間じゅうできるだけ最高効率で共振で運転するように、リニア圧縮機(100)を制御するシステムとが記載される。これらの目的を達成するやり方の一つが、冷却システム(20)に適用し得ると共にリニアモータ(10)によって駆動されるピストン(1)を備えるリニア圧縮機(100)によるものである。ピストン(1)は、被制御電圧(VM)によって制御される変位範囲を有し、又、被制御電圧(VM)は、リニアモータ(10)に印加されると共に処理ユニット(22)によって調整される電圧周波数(fP)を有する。ピストン(1)の変位範囲は、冷却システム(20)の可変要求量の関数として動的に制御されて、リニア圧縮機(100)は共振周波数を有する。処理ユニット(22)がピストン(1)の変位範囲を調整することにより、リニア圧縮機(100)が、冷却システム(20)の要求量の変動の間じゅう共振に動的に保持される。  (もっと読む)
(もっと読む)
リニアモータおよびそのためのトランスデューサ配置

磁界検出器の位置決めにおける製造誤差またはアセンブリ誤差を補償する改良されたリニアモータ。リニアモータは、磁界検出器のうちの1つの出力に単に組み合わせる(例えば、加算する)ことができる補正信号を合成して、磁界検出器出力が適正な位相関係を有するようにする。その結果として、これにより、ステータに対するロータの正確な位置決めを達成できるようになる。好ましい実施形態では、意図的な誤差が磁界検出器の位置決めに導入され、この誤差は、製造許容差またはアセンブリ許容差による誤差を加えて、補正信号を使用して補正される。これにより、使用される一方向の位相オフセット誤差だけを補正する単純化された補正回路が可能になる。 (もっと読む)
移動調整機能付きリニアモータ
殊にモジュール様式の搬送装置用のリニアモータおよび、リニアモータの移動調整部ないしは運動調整部であって、搬送装置は直線区間部分およびカーブ状区間部分を有しており、直線区間部分およびカーブ状区間部分は区間コースを形成する。本発明の課題は、殊に多数の二次側部分を使用する場合に、低い装置コストおよびソフトウェアコストのもとで、殊に種々異なる用途または機械構造に関する広範なモジュール性ないし柔軟性が保証されるように、冒頭に記載された形式のリニアモータを設計することである。この課題は、二次側部分(7)が、少なくとも1つの永久磁石および信号処理装置(6)を有しており、信号処理装置は移動調整部ないし運動調整部を有しており、移動調整部ないし運動調整部は、コイル駆動制御部(9)に関連する少なくとも1つの目標値を形成し、この目標値は、目標値インタフェース(1)を介して、二次側部分から、一次側部分(8)に関して位置固定されたコイル駆動制御部(9)へ、整流に使用される量として供給され、二次側部分の確固たる支承のための手段が設けられており、この手段は、二次側部分を所定の走行距離区間に沿ってガイドする、ことによって解決される。  (もっと読む)
(もっと読む)
電動機の制御方法及び装置
本発明は、制御ユニット(1)がパラメータ化の可能な速度コントローラ(26)及びパラメータ化の可能な補助コントローラ(28)を備え、可動機械部(7、8)の位置(29)を検出し、前記可動機械部(7、8)の位置を変化させるための電動機(5)を備えた電動機(5)の制御方法に関する。速度コントローラ(26)の少なくとも1つのパラメータ(31)および/又は補助コントローラ(28)の少なくとも1つのパラメータ(33)を可動機械部(7、8)の位置(29)に応じて変化させる。  (もっと読む)
(もっと読む)
同期リニアモータの負荷状態を無センサ式で検出する方法及び回路装置

フィルム延伸装置の同期リニアモータ、特にリニア駆動装置の制御に使用する方法及び回路装置において、優先制御装置から生ずる2つのパルス(new_clip)間の時間(tclip)に亘り有効電力の積分値を計算し、主部(20)の有効長(lzone)により積分値を除算することにより、計算ブロック(11)の調整器(10)内で測定し又は算出した電流及び電圧から、静止主部(20)と可動副部(30)との間に作用する力(Fclip)を無センサ式に決定する。別法として、f軸の合計電圧により力(Fclip)を決定し、主部(20)のレールの抵抗(Rstr)に関する電圧降下を減算できる。この場合、副部(30)に関する座標系により主部(20)上で電圧と電流が変換される。 (もっと読む)
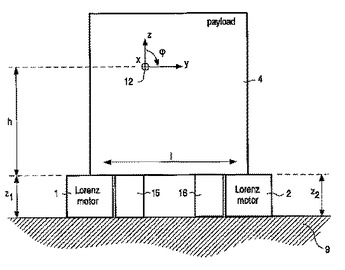
ペイロードのためのローレンツモータ制御システム
ペイロード(4)を動かす複数のローレンツモータ(1、2)を制御するための制御構成及び方法であって、ペイロードが重心(12)を有する、制御構成及び方法について開示している。高さ信号(z1、z2)は前記ペイロードの高さを検出するセンサから受信される。水平方向の軸の周りの重心の少なくとも1つの回転角度はそれらの高さ信号(z1、z2)から計算され、ペイロード(4)を支持するための所定の回転剛性が達成されるように、この少なくとも1つの回転角度から、ローレンツモータ(1、2)のための制御信号(C1、C2)が計算される。典型的なアプリケーションは電子顕微鏡又はリソグラフィ装置の床免震用緩衝部である。
 (もっと読む)
(もっと読む)
電気モータ動作制御方法、電気モータ動作制御システム、およびコンプレッサ
電気モータ動作制御方法であって、電気モータにネットワーク電圧(VAC)に比例する全電圧(VT)が供給され、上記方法は、計測値(t10)の第1のモーメントにおける上記ネットワーク電圧(VAC)のレベル(Vt10)の第1の計測値を計測するステップと、計測値(t20)の第2のモーメントにおけるネットワーク電圧(VAC)のレベル(Vt20)の第2の計測値を計測するステップと、計測値(t10、t20)の上記第1および第2のモーメントの関数で計測される電圧値の導関数の値を計算して、比例ネットワーク電圧(VAC’)の値を得るステップと、上記比例ネットワーク電圧(VAC’)の上記値に比例して、上記モータに供給される上記全電圧(VT)の値を変更するステップとを含む。本発明の方法のステップを実現するシステムは、コンプレッサ(14)が本発明のシステムを備えると同様に、予想できる。  (もっと読む)
(もっと読む)
341 - 350 / 350
[ Back to top ]