
国際特許分類[H02P6/16]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 回転子の位置に依存する電子整流子を有する同期電動機または他の電動機の制御装置;それに用いる電子整流子 (4,020) | 電子整流子 (1,576) | 位置検知用回路装置 (1,558)
国際特許分類[H02P6/16]の下位に属する分類
国際特許分類[H02P6/16]に分類される特許
1 - 10 / 738
車両用操舵装置
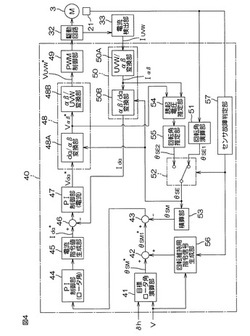
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
車両用ブラシレスモータの駆動装置

【課題】 より簡素な構成で製造コストを削減しながら、回転子の適切な位置検出によってブラシレスモータを駆動することができる車両に搭載された車両用ブラシレスモータの駆動装置を提供する。
【解決手段】 複数の固定子巻線UI、VI、WIへの電圧の供給をオン/オフするための電流調整PWM信号を生成する駆動信号生成手段54と、生成された電流調整PWM信号に応じて、各固定子巻線に電圧を供給する電圧供給手段20と、電流調整PWM信号から所定の期間TMREF1だけ位相をずらした内部PWM信号を生成する位置検出用信号生成手段55と、生成された内部PWM信号および検出された各固定子巻線に供給される電圧に応じて、回転子と各固定子巻線との相対的な位置を検出する位置検出手段55と、を備え、駆動信号生成手段54は、検出された回転子の位置に応じて、電流調整PWM信号を生成する。
(もっと読む)
検出装置、駆動装置
【課題】回転体の正確な回転角度の算出などに必要な処理量を削減する。
【解決手段】回転体の回転角度に応じて、それぞれの位相が異なる複数の正弦波信号を出力する検出手段と、前記複数の正弦波信号に基づいて、前記回転体の回転角度を算出する算出手段と、前記回転体の、基準となる回転角度を含む基準信号を出力する基準信号出力手段と、前記算出手段により算出された回転角度と、前記基準信号出力手段が出力した基準信号に含まれる回転角度とに基づいて、前記検出手段により出力された前記複数の正弦波信号の振幅が同一または略同一になるように調整する調整手段と、を有することを特徴とする検出装置。
(もっと読む)
モータ駆動制御装置及び方法
【課題】高価な光学式エンコーダを用いることなくモータ転流駆動用の磁気センサを利用しより多くの位相検出を行う。
【解決手段】複数相のコイルを有するモータの回転子の回転位置に応じた信号レベルを有する複数のセンサ信号に基づいて位相情報信号を発生してモータを駆動制御するモータ駆動制御装置において、センサ信号を所定の複数のしきい値レベルと比較して位相を検出し、当該検出した位相を示す位相情報信号を出力し、検出された位相を所定の複数の位相区間に分け、所定の複数の位相区間において複数のセンサ信号又はそれに対応する複数の信号の中から一つを選択し、分割された複数の位相区間において選択されたセンサ信号又はそれに対応する信号の信号レベルが回転子の所定の位相に応じた所定のしきい値レベルに到達したことを検出することにより、当該検出した位相を示す位相情報信号を出力する。
(もっと読む)
検出装置、駆動装置
【課題】小型化を図った検出装置、駆動装置を提供する。
【解決手段】モータの回転角度に応じて、それぞれの位相が異なるL個(Lは、2以上の整数)の第1正弦波信号を生成する生成手段と、前記L個の第1正弦波信号それぞれを用いた演算を行なうことにより、M個(Mは、M>Lを満たす整数)の第2正弦波信号を生成する演算手段と、前記M個の第2正弦波信号それぞれの振幅値と、予め定められた閾値とを比較し、比較結果を示すN個(Nは、N≧Mを満たす整数)の比較結果信号を生成する比較手段と、前記比較手段により生成された前記N個の比較結果信号に基づいて、前記モータの回転位置および前記モータの回転速度のうち少なくとも一方を検出するための検出信号を生成する検出手段と、を有することを特徴とする検出装置。
(もっと読む)
モータ駆動制御装置及び方法
【課題】高価な光学式エンコーダを用いることなくモータ転流駆動用の磁気センサを利用しより多くの位相検出を行う。
【解決手段】モータの回転子の回転位置に応じた信号レベルを有する複数のセンサ信号に基づいて位相情報信号を発生してモータを駆動制御するモータ駆動制御装置において、複数のセンサ信号を所定の複数のしきい値レベルと比較して位相を検出し、検出した位相を示す第1の位相情報信号を出力し、複数のセンサ信号どうしを比較して位相を検出し、検出した位相を示す第2の位相情報信号を出力し、第1の位相情報信号及び第2の位相情報信号に含まれる検出された位相を所定の複数の位相区間に分け、所定の複数の位相区間において複数のセンサ信号の中から一つを選択し、前記選択されたセンサ信号の信号レベルが回転子の所定の位相に応じた所定のしきい値レベルに到達したことを検出することにより、検出した位相を示す位相情報信号を出力する。
(もっと読む)
電動オイルポンプ装置
【課題】円滑に起動し、センサレス制御で確実に駆動できるブラシレスモータを備えた電動オイルポンプ装置を提供する。
【解決手段】基板19と対向するロータ6の回転面には、周縁部から中心に向かう白色の線状の検出対象物21が等角度で複数形成されている。基板19には、ロータ6と対向する面上に、発光素子と受光素子の2つの赤外線素子同士が同一方向に並んで配置された反射型フォトセンサである光センサ22が搭載されている。光センサ22の発光部から出た赤外光は、ロータ6の回転面に形成された検出対象物21に反射して光センサ22の受光部に入射する。制御部20は、光センサ22から出力された検出対象物21の検出パターンの情報に基づき、ロータ6の角度位置を演算する。
(もっと読む)
モータ駆動装置、シート搬送装置及び画像形成装置
【課題】DCブラシレスモータを駆動源として用いて被駆動体の速度を自在に調整するとともに、回転センシング信号へのノイズの混入に起因するモータ回転の不安定化、及び負荷変動に起因する第1搬送ローラ16aの速度不安定化を抑える
【解決手段】DCブラシレスモータからなる搬送モータ210の励磁コイルの切り替えタイミングをドライバ回路212に把握させるために搬送モータ210の回転量を検知するホール素子217とは別に、同回転量をホール素子217よりも高精度に検知するモータエンコーダ211を搬送モータ210に搭載するとともに、ドライバ回路212を搬送モータ210に搭載し、モータエンコーダ211による検知結果に基づいてドライバ回路212からコイルに供給される励磁電圧の量を調整することで、搬送モータ210の回転速度を調整する速度調整処理を実施するように、モータ制御回路210を構成した。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
1 - 10 / 738
[ Back to top ]