
便器装置
【課題】異物が混入した場合であっても継続使用を可能としつつ、内部機構に不具合が発生する前に異物を除去することが可能な便器装置を提供すること。
【解決手段】この便器装置は、貯留槽への異物の混入を検知した後、粉砕手段の汚物粉砕動作が継続可能な場合には、駆動手段による粉砕手段の回転駆動を継続させつつ、貯留槽内に異物が存在することを報知する報知動作を行う継続運転モードを実行する。
【解決手段】この便器装置は、貯留槽への異物の混入を検知した後、粉砕手段の汚物粉砕動作が継続可能な場合には、駆動手段による粉砕手段の回転駆動を継続させつつ、貯留槽内に異物が存在することを報知する報知動作を行う継続運転モードを実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、便器と、便器から汚物を搬送するための洗浄水を供給する給水手段と、便器から洗浄水によって搬送された汚物を粉砕し、粉砕された汚物を圧送して排出管へ排出する処理装置と、を備える便器装置に関する。
【背景技術】
【0002】
従来から、戸建て住宅や集合住宅のトイレでは、トイレから下水までの排水管の傾斜勾配を利用して排水が行なわれている。このような排水管の傾斜勾配を利用するものは、トイレから下水まで排水管を設置するにあたっては、建築時に排水管を設置するものであるから、後からトイレを増設したり移設する場合には、トイレを設置する場所の床をはがして地面を掘り起こしたりする等、設置工事の作業に負担がかかり、現実的には増設や移設は困難なものであった。また、トイレを設置する場所から下水までに排水管を通す必要があるため、住宅の間取りと排水管の設置位置によってはトイレの設置場所が制限されて自由にレイアウトできないといった事情もある。このような工事負担を低減し、レイアウトの自由度を確保する観点から、トイレから下水へ排水を圧送する圧送装置を備えた圧送式トイレが開発されている(例えば、下記特許文献1参照)。
【0003】
下記特許文献1に記載されている圧送式トイレは、当該文献においては詳述されていないけれども、建築躯体側の排水管に着脱可能なホースを接続して用いることが可能なものである。この圧送式トイレは、排水管に接続可能なアダプタが設けられている場所であれば、その場所に移動させて使用することが可能なものでもある。
【0004】
具体的な構成として、この圧送式トイレは、便器本体に繋がる貯留槽内に、モーター、このモーターに連結された回転軸、この回転軸に取り付けられた粉砕歯、及びインペラを備えている。使用者が便器の使用後に洗浄水を流すと、洗浄水と共に汚物が貯留槽の供給口を介して粉砕室内へ搬送される。この搬送にあわせて、モーターが作動することにより、回転軸が回転し、この回転軸の回転に伴って、粉砕歯及びインペラが回転する。
【0005】
汚物は、モーターにより回転駆動された粉砕歯によって粉砕され、粉砕室の周壁及び底壁に設けられた孔を通過し、粉砕室から流れ出る。粉砕室から流れ出た粉砕後の汚物は、モーターにより駆動されたインペラの回転によって、洗浄水と共にホースを経由して排水管へと圧送される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−328641号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述した圧送式トイレは、便器本体から流入する汚物を粉砕し、建築躯体側の排水管に繋がるホースを経由して下水に粉砕後の汚物を流すものである。圧送式トイレの可搬性を確保する観点から、このホースの径を建築躯体側の排水管と同等の太さにすることは困難であり、排水管に比較して小径のものが用いられる。このような小径のホースを経由して汚物を流す必要性から、上述したように汚物を粉砕するものであるから、汚物は確実に粉砕する必要がある。
【0008】
一方、便器本体には汚物以外の異物が誤って流される場合がある。このような異物の例としては、硬質の異物であるライターや、軟質の異物であるお尻拭きシートといったものがある。硬質の異物であるライターが粉砕し難いのはもちろんのこと、軟質の異物であるお尻拭きシートも粉砕し難いものである。このような異物が誤って便器本体に流されると、回転する粉砕歯と貯留槽との間に噛み込まれてしまい、モーターの回転を阻害する場合があった。モーターの回転が阻害されれば、インペラの回転も阻害され、汚物の排出もできなくなってしまい、圧送式トイレそのものが使用不可能になってしまう場合があった。
【0009】
従って、圧送式トイレのような便器装置は、可搬性を考慮しない従来の通常のトイレよりも、異物の混入に対する許容度は低くならざるを得ない。しかしながら、実際にこのような可搬性のある便器装置を用いるのは、介護の現場なども多く、お尻拭きシートを用いたり、紙おむつを用いたりする場合が多いため、それら軟質の異物が誤って便器本体に流されてしまうことは避け難いものである。
【0010】
便器装置の機構保護の観点からは、貯留槽に異物が入り込んだ場合には、即座に粉砕歯やインペラの回転を停止し、異物を取り除くことが好ましいものである。しかしながら、異物は貯留槽内に留まるものであるから、それを取り除くには貯留槽内に手を入れる必要があり、一般の使用者にそのような作業をさせることは困難である。従って、貯留槽内の異物を取り除くために、専門のサービススタッフが現場に行って作業を行う必要がある。このように、専門のサービススタッフを現場に呼び、異物を取り除く作業をしてもらい、便器装置の使用可能状態が回復するまでには、相応の時間が必要になる。上述したように、このような便器装置が用いられるのは、介護の現場も多いことから、使用者が代替のトイレまで行けないことも多く、便器装置の使用不可期間が長引くことは避けたいものである。特に介護の現場では、排便調整に用いる下剤や浣腸の作用によって、持続的に排便を行う場合があり、このような場面で便器装置が使えなくなると、その不便さは通常のトイレの比ではない。
【0011】
そこで本発明者らは、異物が混入しても、回転する粉砕歯と貯留槽との間に噛み込まれず、継続使用が可能な便器装置を検討した。貯留槽に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能な構成はいろいろと想起されるものであるが、いずれにしても噛み込みを起こさずに汚物のみを粉砕する構成となるものである。従って、貯留槽内に混入した異物は、粉砕されることなく残留することになる。特に、お尻拭きシートのように、繊維を樹脂で固めて成形されたものが混入すると、それ自体は水には溶けないものであるから、貯留槽内に残留し続けることになる。異物が混入しても、回転する粉砕歯と貯留槽との間に噛み込まれないような便器装置であっても、異物が残留し続ければいずれは不具合に繋がるおそれがあり、何らかの対策が必要になることを本発明者らは見出したものである。
【0012】
本発明はこのような課題に鑑みてなされたものであり、その目的は、汚物を粉砕して排出することが可能な便器装置であって、異物が混入した場合であっても継続使用を可能としつつ、内部機構に不具合が発生する前に異物を除去することが可能な便器装置を提供することにある。
【課題を解決するための手段】
【0013】
上記課題を解決するために本発明に係る便器装置は、便器と、前記便器から汚物を搬送するための洗浄水を供給する給水手段と、前記便器から洗浄水によって搬送された汚物を粉砕し、粉砕された汚物を圧送して排出管へ排出する処理装置と、を備える。前記処理装置は、前記便器から搬送される汚物を溜める貯留槽と、前記貯留槽に溜められた汚物を回転動作によって粉砕する粉砕手段と、前記粉砕手段によって粉砕された汚物を回転動作によって排出管へ圧送する圧送手段と、前記粉砕手段及び前記圧送手段を回転駆動する駆動手段と、前記貯留槽に異物が混入したことを検知する検知手段と、前記検知手段の検知結果を取得し、前記駆動手段を駆動制御する制御手段と、を有している。前記粉砕手段は、前記貯留槽に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能なように構成されている。前記制御手段は、前記貯留槽への異物の混入を検知した後、前記粉砕手段の汚物粉砕動作が継続可能な場合には、前記駆動手段による前記粉砕手段の回転駆動を継続させつつ、前記貯留槽内に異物が存在することを報知する報知動作を行う継続運転モードを実行する。
【0014】
本発明によれば、粉砕手段が、貯留槽に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能なように構成されているので、お尻拭きシートのように誤って投入されやすく且つ粉砕し難い異物が混入しても、便器装置の使用を継続することができる。本発明の制御手段は、貯留槽への異物の混入を検知した後、粉砕手段の汚物粉砕動作が継続可能な場合には、継続運転モードを実行するものである。本発明の継続運転モードは、駆動手段による粉砕手段の回転駆動を継続させつつ、貯留槽内に異物が存在することを報知する報知動作を行うものである。従って、貯留槽へ異物が混入したとしても粉砕手段による粉砕動作が継続可能である範囲において便器装置の使用が可能になる一方で、異物が混入されながら運転が継続されていることを使用者に認知させることができる。例えば、本発明に係る便器装置を介護の現場に用いれば、お尻拭きシートのように誤って投入されやすい異物が混入し、即座の修理対応が間に合わないような場合であっても、便器装置の使用を継続することができる。そして、そのように異物が混入された状態で使用が継続されていることを使用者は認知することができるので、便器装置の使用が継続されている間に修理対応のために専門業者を呼ぶことが可能となる。従って、貯留槽内に異物が過度に残留し、粉砕手段が作動不能な状態に陥ってしまうことを防止できる。
【0015】
また本発明に係る便器装置では、前記制御手段は、前記継続運転モードにおいて、前記貯留槽への異物の混入を検知した後の前記粉砕手段の粉砕性能を、前記便器装置の使用回数に応じて前記駆動手段による回転駆動を抑制することで低下させ、当該粉砕性能の低下によって異物の存在を報知することも好ましい。
【0016】
この好ましい態様では、駆動手段による回転駆動を抑制することで粉砕手段の粉砕性能を低下させ、その粉砕性能の低下によって異物の存在を報知するので、便器装置の使用状態を緩やかに制限して使用者に正常な状態ではないことを認識させつつ、継続使用を許容することができる。粉砕手段の粉砕性能は、異物混入後の使用回数に応じて低下させるので、便器装置の制限的な使用状態を徐々に強めることで、異物の存在を確実に使用者に認識させることができる。
【0017】
また本発明に係る便器装置では、前記制御手段は、前記継続運転モードにおいて、前記便器装置の使用回数が閾値回数を超えた場合には、前記駆動手段を停止させて前記粉砕手段の粉砕動作を停止させることも好ましい。
【0018】
本発明に係る便器装置の粉砕手段は、貯留槽に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能なように構成されている。従って、異物が混入しても、便器装置の使用を継続することができる。しかしながら、異物は粉砕し難いものであり、水溶性でも無い場合があるので、異物が混入した状態で過度に継続運転を許容すれば、粉砕手段が異物を噛み込んでロックしてしまう場合も想定される。また、粉砕性能を過度に低下させれば、通常の汚物も粉砕することができなくなり、便器装置本来の基本的な性能が満たされなくなるおそれがある。そこでこの好ましい態様では、便器装置の使用回数が閾値回数を超えた場合には、駆動手段を停止させて粉砕手段の粉砕動作を停止させることで、使用者に異物の存在を確実に認識させ、便器装置の基本的な性能を担保させることができる。
【0019】
また本発明に係る便器装置では、前記継続運転モードは、少なくとも第一継続運転モードと第二継続運転モードとを有しており、前記貯留槽へ異物が混入していない通常モードにおける前記粉砕手段の回転数に対する回転抑制度合いが、前記第一継続運転モードにおける回転抑制度合いよりも、前記第二継続運転モードにおける回転抑制度合いが大きくなるように構成され、前記制御手段は、前記第一継続運転モードの後に前記第二継続運転モードを実行することも好ましい。
【0020】
この好ましい態様では、継続運転モードを少なくとも二つの運転モードで構成し、その運転モードは、第一継続運転モード及びその後に実行される第二継続運転モードを含むので、段階的な報知動作を行うことが可能となる。具体的には、通常モードにおける粉砕手段の回転数に対する回転抑制度合いが、第一継続運転モードにおける回転抑制度合いよりも、第二継続運転モードにおける回転抑制度合いが大きくなるように構成されているので、段階的に粉砕手段の回転数を抑制することが可能となる。従って、使用者に対しては、第一継続運転モードから第二継続運転モードへの切替によって、その間の回転数のギャップを確実に認識させ、異物が混入した運転状態であることを確実に認識させることができる。
【0021】
また本発明に係る便器装置では、前記第一継続運転モードは、前記継続運転モードの最初に実行される運転モードであって、前記通常モードにおける前記粉砕手段の回転数から前記第一継続運転モードにおける回転数への低減幅が、前記第一継続運転モードにおける前記粉砕手段の回転数から前記第二継続運転モードにおける回転数への低減幅よりも大きいことも好ましい。
【0022】
この好ましい態様では、最初に粉砕手段の回転数を抑制するモードである第一継続運転モードに入った際の回転数の低減幅が、その後の第二継続運転モードに入った際の回転数の低減幅よりも大きいように構成している。従って、異物が混入した最初の段階で大きく粉砕性能が抑制されるので、使用者に異物が混入した運転状態であることを確実に認識させることができる。
【0023】
また本発明に係る便器装置では、前記継続運転モードは、前記第二継続運転モードの後であって、前記継続運転モードの最後に実行される第三継続運転モードを有し、前記第一継続運転モードにおける前記粉砕手段の回転数から前記第二継続運転モードにおける回転数への低減幅よりも、前記第二継続運転モードにおける前記粉砕手段の回転数から前記第三継続運転モードにおける回転数への低減幅が大きいことも好ましい。
【0024】
この好ましい態様では、最後に粉砕手段の回転数を抑制するモードである第三継続運転モードに入った際の回転数の低減幅が、その前の第二継続運転モードに入った際の回転数の低減幅よりも大きいように構成している。従って、異物が混入し継続運転モードを実行している最後の段階で大きく粉砕性能が抑制されるので、使用者に粉砕性能が落ち込んだことを確実に認識させることができる。
【0025】
また本発明に係る便器装置では、前記制御手段が行う報知動作は、使用者に対する警告を発するものであって、前記制御手段は、前記継続運転モードにおいて、前記貯留槽への異物の混入を検知した後の警告度合いを、前記便器装置の使用回数に応じて高めることも好ましい。
【0026】
この好ましい態様では、使用者の聴覚や視覚といった五感を刺激する警告を発することによって異物の存在を報知するので、使用者に正常な状態ではないことを認識させつつ、継続使用を許容することができる。更に、貯留槽への異物の混入を検知した後の警告度合いを徐々に強めるので、異物の存在を確実に使用者に認識させることができる。
【発明の効果】
【0027】
本発明によれば、異物が混入した場合であっても継続使用を可能としつつ、内部機構に不具合が発生する前に異物を除去することが可能な便器装置を提供することができる。
【図面の簡単な説明】
【0028】
【図1】本発明の実施形態である便器装置の構成を概念的に示す概略構成図である。
【図2】図1に示す便器装置に含まれる処理装置の構成を概念的に示す概略構成図である。
【図3】図1に示す便器装置の制御的な構成を示すブロック構成図である。
【図4】図1に示す便器装置の動作を示すフローチャートである。
【図5】図4に示す動作を実行した場合の駆動状態を示すタイミングチャートである。
【発明を実施するための形態】
【0029】
以下、添付図面を参照しながら本発明の実施の形態について説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては可能な限り同一の符号を付して、重複する説明は省略する。
【0030】
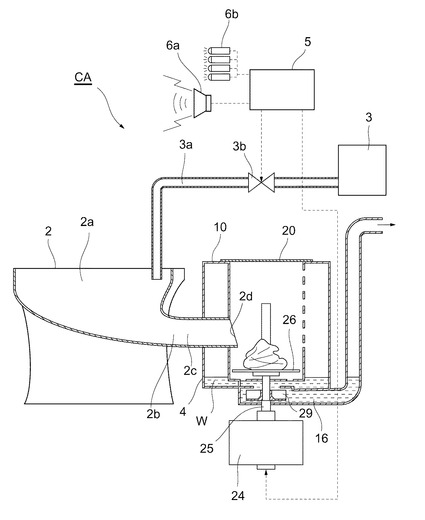
本発明の実施形態である便器装置CAについて、図1を参照しながら説明する。図1は、便器装置の構成を概念的に示す概略構成図である。図1に示すように、便器装置CAは、便器2と、給水装置3(給水手段)と、処理装置4と、制御装置5(制御手段、検知手段)と、を備えている。
【0031】
便器2は、ボウル部2aと、搬送管路2bと、排水口2cと、フラップ弁2dとを有している。ボウル部2aは、排便や拭き取り紙といった汚物を受け止める凹面が形成されてなる部分である。ボウル部2aの下方には、処理装置4に繋がる搬送管路2bが設けられている。ボウル部2aが受け止めた汚物は、洗浄水によって搬送管路2bへと送り出される。便器2の形式は特に限定されるものではなく、サイホン式やサイホンジェット式の便器であってもよい。
【0032】
搬送管路2bの処理装置4側末端には、排水口2cが設けられている。搬送管路2bは、処理装置4内に挿入され、排水口2cは処理装置4内に開口している。排水口2cには、排水口2cを開閉するためのフラップ弁2dが設けられている。フラップ弁2dは、制御装置5からの指示信号に応じて、開閉可能なように構成されている。
【0033】
給水装置3は、便器2に洗浄水を供給するための装置である。便器2への洗浄水供給方式は、状況に応じて適切なものが選択されうる。例えば、給水装置3としてタンクを設け、そのタンクに貯水し、貯めた洗浄水を便器2に流すように構成することも好ましいものである。また、建築躯体側の水道に直結し、洗浄水として給水を受け、便器2に流すように構成することも好ましいものである。このように、給水装置3は、便器2に洗浄水を供給するあらゆる手段が採用されうるものである。
【0034】
給水装置3と便器2とは、便器給水路3a(給水手段)によって繋がれている。便器給水路3aには、当該水路を開閉可能な給水弁3b(給水手段)が設けられている。給水弁3bは、制御装置5からの指示信号に応じて、開閉可能なように構成されている。給水弁3bが開かれると、給水装置3から供給された洗浄水が、便器給水路3aを通って便器2のボウル部2aへ流し込まれる。この洗浄水のボウル部2aへの流入によって、ボウル部2aが受け止めた汚物が、搬送管路2bを通って処理装置4へと送り込まれる。給水弁3bが閉じられると、給水装置3から供給される洗浄水が停止される。
【0035】
処理装置4は、貯留槽10と、粉砕圧送部20(粉砕手段、圧送手段)とを有している。粉砕圧送部20は、貯留槽10内に設けられている。貯留槽10及び粉砕圧送部20の下部には、排出管16が繋がれており、排出管16は建築躯体側の排水管に繋がれている。
【0036】
貯留槽10は、便器2から送り込まれる汚物を一時的に受け入れる部分である。粉砕圧送部20は、貯留槽10に貯められた汚物を回転動作によって粉砕し、その粉砕された汚物を排出管へと圧送する部分である。
【0037】
粉砕圧送部20は、モーター24(駆動手段)と、回転軸25(駆動手段)と、底板26(粉砕手段)とを有している。制御装置5からの指示信号によってモーター24が回転すると、モーター24の回転軸25が回転駆動される。回転軸25には、底板26(粉砕手段)とインペラ29(圧送手段)が取り付けられている。底板26及びインペラ29は、回転軸25の回転駆動に応じて回転駆動される。
【0038】
制御装置5には、使用者に情報を報知するための報知手段として機能するスピーカー6a及び報知ランプ6bが設けられている。
【0039】
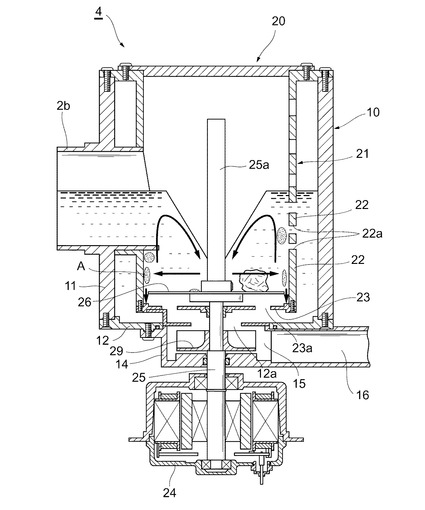
続いて、処理装置4の構成について図2を参照しながら説明する。図2は、処理装置4の内部構成を示すべく模式的に断面図として描かれた図である。
【0040】
処理装置4は、貯留槽10と粉砕圧送部20とを有している。粉砕圧送部20は、貯留槽10の内部に納められている。貯留槽10は、便器2から搬送されてきた洗浄水と汚物とを溜めるように構成された中空の容器である。貯留槽10は、側壁11及び底壁12を有している。貯留槽10は、底壁12の周囲に立設された側壁11が囲む空間に、洗浄水及び汚物を貯めることができるように構成されている。
【0041】
側壁11には、便器2の搬送管路2bが貫通されている。側壁11を貫通した搬送管路2bは、粉砕圧送部20に繋がっている。
【0042】
底壁12には、開口12aが形成されている。この開口12aを塞ぐと共に、底壁12から下方へ突出するように、ポンプ室14が取り付けられている。このポンプ室14には、排出口15が形成されている。この排出口15には、排出管16が連結されている。排出管16は、排出口15から横方向へ延びた後、上方へと延びている(図1参照)。排出管16は、アタッチメントなどによって、建築躯体側の排水管に繋がれている。従って、排出口15から送り出された汚物は、排出管16から排水管を通って下水へと流される。
【0043】
貯留槽10には、便器2から排水された洗浄水を滞りないようにして排水するべく、貯留槽10内に存在している空気を貯留槽10の外部へと排出させる通気管(図示せず)なるものが設けられている。
【0044】
粉砕圧送部20は、粉砕室21と、モーター24と、回転軸25と、インペラ29と、底板26とを有している。
【0045】
粉砕室21は、貯留槽10内に配置された有底円筒状の部分であって、底壁23と、底壁23の外周から立ち上がるように形成される筒状の周壁22とを有している。底板26は、円板状を成しており、粉砕室21の底壁23の上部に位置するように設けられている。底板26の上方には、洗浄水及び汚物を受け入れる空間が確保されている。
【0046】
周壁22は、貯留槽10の側壁11の内側に沿って設けられている。周壁22には、洗浄水や小さな汚物が通過できる複数の孔22aが形成されている。周壁22に形成された孔22aは、周壁22のうち、底板26の高さ付近には設けられておらず、底板26よりも所定高さだけ上方から更に上方の領域に形成されている。また、孔22aは、下方よりも上方に形成されたものほど、孔開口面積が大きくなるように形成されている。
【0047】
周壁22は、底板26の周方向の少なくとも一部に沿って、波状となるような凹凸形状を有している。この凹凸形状は曲面状である。この凹凸形状は、異物が引っかからないように、滑らかな曲面状であることが好ましい。なお、上記凹凸形状は、周壁22の高さ方向全域にわたって形成してもよいし、周壁22のうち底板26の側方に対応する高さ位置及びその上下の所定範囲のみに形成してもよい。
【0048】
このように周壁22を構成することで、本実施形態では、対流や旋回を伴う攪拌によって、又は、底板26の回転による遠心力によって、汚物が周壁22へ押し付けられる。汚物が周壁22に押し付けられることで、汚物へ局所的な又は集中的な外力を与え、汚物に局所的又は集中的な応力を発生させることができる。また、汚物が周壁22内を水流と共に旋回するときに、周壁22の凸部に衝突する。この衝突によって、汚物へ局所的な又は集中的な外力を与え、局所的又は集中的な応力を発生させることができる。本実施形態では、このような粉砕手法を採用することで、異物が混入した場合であっても、噛み込みが発生し難いように構成されている。従って、汚物に混じって若しくは汚物に代わって異物が混入した場合であっても、汚物の粉砕動作を継続することができるように構成されている。
【0049】
一般に、平面視で円形の周壁に汚物が衝突した場合には、汚物と周壁との接触面積が大きく、汚物が周壁の周面に沿って移動し易いので、汚物に対する衝撃が弱まるおそれがある。これに対して、本実施形態では、汚物Aが周壁22に形成された凹凸面のうち内側へ突出する凸部の頂部へ衝突することにより、汚物Aを確実に粉砕することができる。なお、本実施形態では、周壁22が曲面状の凹凸形状を有しているが、汚物Aの粉砕が確実に起こるのであれば、凹凸形状を有しない円筒面を構成するように形成することも好ましい態様である。
【0050】
周壁22には、貯留槽10の側壁11を貫通した搬送管路2bが貫通するように連結されている。従って、搬送管路2bを通って送り込まれる汚物は、粉砕室21内に供給されるように構成されている。
【0051】
底壁23には、回転軸25が貫通するように設けられている。底壁23の回転軸25が貫通する部分の周辺には、粉砕され小さくなった汚物が通過できる複数の孔23aが形成されている。
【0052】
モーター24は、ポンプ室14の下部に配置されている。モーター24は、制御装置5から出力される指示信号に応じて回転駆動するように構成されている。モーター24には回転軸25が取り付けられており、モーター24の回転駆動によって回転軸25も回転するように構成されている。
【0053】
回転軸25は、モーター24からポンプ室14内を通って粉砕室21まで上方へ延びている。回転軸25の基端部付近であって、ポンプ室14内には、インペラ29が取り付けられている。回転軸25の途中部分であって、粉砕室21の底部付近には、円板状の底板26が取り付けられている。
【0054】
回転軸25には、底板26の上方から先端にかけて、表面の摩擦を大きくするために刻み目が形成されている。摩擦をより大きくするために、回転軸25の表面にラバー等の他の部材を取り付けてもよい。回転軸25の底板26よりも上方の部分25aは、異物捕集手段として機能する部位である。部分25aは、表面の摩擦を大きくすることにより、繊維状のやわらかい異物を引っ掛けて絡ませ易くするように構成されている。
【0055】
インペラ29は、ポンプ室14内に配置されており、底板26と共に回転するように回転軸25に取り付けられている。貯留槽10からポンプ室14内へ流入した汚水は、インペラ29の回転により排出管16へ圧送される。
【0056】
続いて、便器装置CAの制御的な構成について、図3を参照しながら説明する。図3は、便器装置CAの制御的な構成を示すブロック構成図である。図3に示すように、便器装置CAは制御的な構成要素として、制御装置5と、水位検知センサー7aと、着座検知センサー7bと、リモートコントローラー7cと、給水弁3bと、モーター24と、フラップ弁2dと、スピーカー6aと、報知ランプ6bと、を備えている。
【0057】
制御装置5は、他の制御的な構成要素と信号の授受を行うためのインターフェースと、CPUといった演算デバイスと、ROMやRAMといった記憶デバイスとを含むものである。制御装置5は、水位検知センサー7a、着座検知センサー7b、及びリモートコントローラー7cそれぞれか出力される検知信号や操作指示信号を受け取る。制御装置は、それらの検知信号や操作指示信号に基づいて所定の情報処理を行い、給水弁3b、モーター24、フラップ弁2d、スピーカー6a、及び報知ランプ6bに、所定の動作を実行させるための指示信号(制御信号)を出力する。給水弁3b、モーター24、フラップ弁2d、スピーカー6a、及び報知ランプ6bは、この指示信号(制御信号)を受けて所定の動作を実行するように構成されている。尚、本実施形態の場合は、モーター24は、回転数の情報を制御装置5にフィードバックできるように構成されている。
【0058】
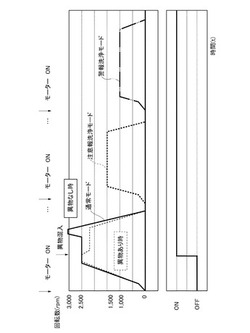
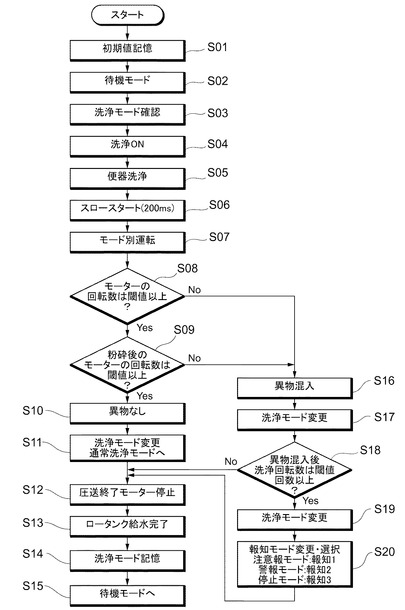
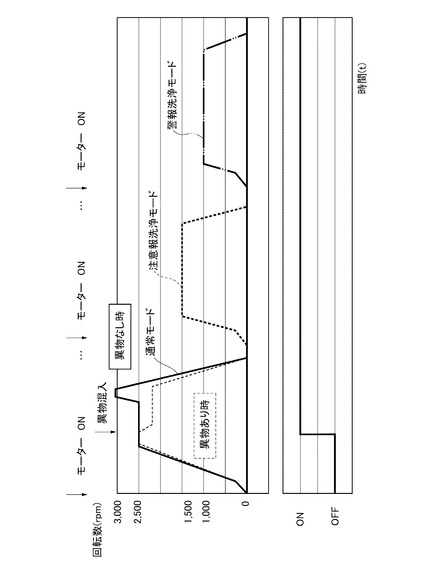
続いて、便器装置CAの動作にすいて、図4及び図5を参照しながら説明する。図4は、便器装置CAの動作を示すフローチャートである。図4に示すフローチャートの動作主体は、主に制御装置5である。図5は、洗浄モードに応じたモーター24の回転数を示したグラフである。図5では更に、報知動作についても示している。図5では、通常モードで洗浄動作を行っている際に異物が混入し、注意報洗浄モード、警報洗浄モードと洗浄モードを切り替えていっていることを示している。続く便器装置CAの説明は、主に図4を参照しながら進め、適宜図5を参照するものとする。
【0059】
ステップS01では、試運転モードでの制御を実行し、各種初期値を記憶する。試運転モードに含まれる運転モードは、漏水検知モード、配管・通気管チェックモード、ポンプ初期性能記憶モードである。ポンプ初期性能記憶モードでは、制御装置5からモーター24へ所定の指示信号を出力し、モーター24を回転駆動させる。この際の回転数を示す情報が、モーター24から制御装置5へとフィードバックされる。制御装置5は、これらの情報に基づいて、モーター24の回転数に基づいて判断する際の閾値を調整する。制御装置5は、洗浄モードの情報をリセットし、ステップS02の処理に進む。
【0060】
ステップS01に続くステップS02では、制御装置5は待機モードに移行する。ステップS02に続くステップS03では、設定されている洗浄モードを確認する。最初の運転時であれば、ステップS01において洗浄モードの情報をリセットしてあるので、通常モードとなっている。通常モードの他の洗浄モードとしては、注意報洗浄モード(第一継続運転モード)、警報洗浄モード(第二継続運転モード)、停止モード(第三継続運転モード)がある。
【0061】
ステップS03に続くステップS04では、リモートコントローラー7cから出力される洗浄開始指示信号に基づいて、制御装置5は、給水弁3bに洗浄指示信号を出力する。給水弁3bは、洗浄指示信号に基づいて開弁し、給水装置3から送り出される洗浄水を便器2へと流す。ステップS04に続くステップS05では、便器2が洗浄される。ステップS05における便器2の洗浄に伴って、便器2内の汚物は洗浄水と共に処理装置4へと流される。
【0062】
ステップS05に続くステップS06では、制御装置5はモーター24にスロースタートするように指示信号を出力する。具体的には、制御装置5は、モーター24に200msの間低速で回転するように指示信号を出力する。このように低速でモーター24を回転させるのは、引っ掛かり防止や突入電流低減のためである。
【0063】
ステップS06に続くステップS07では、制御装置5は、モード別運転を実行する。制御装置5はモーター24に、各モードに応じた所定の回転数で回転駆動するように、指示信号を出力する。具体的には、通常モードの場合には2500rpm、注意報洗浄モードの場合には1500rpm、警報洗浄モードの場合には1000rpm、停止モードの場合には0rpm(実質的に回転を停止させる指示)である。
【0064】
モーター24が制御装置5から出力された指示信号に基づいて回転し、回転軸25が回転すると、底板26及びインペラ29も回転する。粉砕圧送部20内に異物が混入していると、通常の汚物が入っている場合に比較して回転継続に必要となるトルクが増大し、実際の回転数は低下する。この現象を利用するため、制御装置5は、モーター24の実回転数のフィードバックを受けている。
【0065】
ステップS07に続くステップS08では、制御装置5が、モーター24の実回転数を取得する。制御装置5は、モーター24の実回転数が、所定の閾値回転数以上となっているか判断する。具体的には、通常モードの場合には閾値回転数が2200rpm、注意報洗浄モードの場合には閾値回転数が1300rpm、警報洗浄モードの場合には閾値回転数が900rpmである。モーター24の実回転数が、閾値回転数以上となっていればステップS09の処理に進み、閾値回転数以上となっていなければステップS16の処理に進む。
【0066】
ステップS09では、粉砕処理の後期段階において、制御装置5が、モーター24の実回転数を取得する。制御装置5は、モーター24の実回転数が、所定の閾値回転数以上となっているか判断する。ステップS09における閾値回転数は、2500rpmである。これは、粉砕処理が終了すれば、異物が混入していなければモーター24の回転数が上昇するはずであることを利用している。従って、モーター24の実回転数が、閾値回転数以上となっていればステップS10の処理に進み、閾値回転数以上となっていなければステップS16の処理に進む。尚、ステップS09では、実質的に通常モードの場合のみの判断となっている。注意報洗浄モードの場合にはモーター24の回転数の上限が1300rpmであり、警報洗浄モードの場合にはモーター24の回転数の上限が900rpmであるためである。これは、注意報洗浄モード及び警報洗浄モードの場合には異物が混入しているのが前提であり、わざわざ噛み込みのおそれのある制御を回避するためである。
【0067】
ステップS10では、制御装置5は、粉砕圧送部20に異物が混入していないと判断する。ステップS10に続くステップS11では、洗浄モードを通常モードに設定する。ステップS11の処理が終了すると、ステップS12の処理に進む。
【0068】
ステップS16では、制御装置5は、粉砕圧送部20に異物が混入していると判断する。制御装置5は、このように粉砕圧送部20に異物が混入していると判断した回数をカウントアップしながら記憶する。ステップS16に続くステップS17では、モーター24の実回転数に応じて洗浄モードを変更する。具体的には、モーター24の実回転数が2200rpm以上であれば通常モードを維持し、モーター24の実回転数が2200rpm未満であれば注意報洗浄モードにモード変更し、モーター24の実回転数が1300rpm未満であれば警報洗浄モードにモード変更し、モーター24の実回転数が900rpm未満であれば停止モードにモード変更する。
【0069】
ステップS17に続くステップS18では、ステップS16で記憶した異物混入後の洗浄回数に基づいて、所定の閾値回数以上となっているか判断する。具体的には、通常モードの場合には閾値回数が5回であり、注意報洗浄モードの場合には閾値回数が100回であり、警報洗浄モードの場合には閾値回数が200回である。異物混入後の洗浄回数が閾値回数以上となっていればステップS19の処理に進み、異物混入後の洗浄回数が閾値回数未満となっていればステップS12の処理に進む。
【0070】
ステップS19では、洗浄モードを変更する。ステップS18での判断の結果、通常モードにおいて異物混入後の洗浄回数が5回以上となっていれば注意報洗浄モードに変更し、注意報モードにおいて異物混入後の洗浄回数が100回以上となっていれば警報洗浄モードに変更し、警報洗浄モードにおいて異物混入後の洗浄回数が200回以上となっていれば停止モードに変更する。
【0071】
ステップS19に続くステップS20では、制御装置5は、洗浄モードに応じた報知モードを選択し、スピーカー6a及び報知ランプ6bを用いた報知動作を実行する。制御装置5は、注意報洗浄モードの場合には報知動作1を実行し、警報洗浄モードの場合には報知動作2を実行し、停止モードの場合には報知動作3を実行する。報知動作1よりも報知動作2の警告度合いがより強く、報知動作2よりも報知動作3の警告度合いが強くなるように報知動作を実行する。ステップS20の処理が終了すると、ステップS12の処理に進む。尚、報知動作と洗浄モードとを必ずしも連動させる必要は無く、異物混入後の洗浄回数に応じて報知動作を切り替えることも好ましい態様である。
【0072】
ステップS12では、制御装置5がモーター24へ停止指示信号を出力する。ステップS12に続くステップS13では、給水装置3においてロータンクへの給水が完了する。ステップS13に続くステップS14では、制御装置5は洗浄モードを記憶する。ステップS14に続くステップS15では、待機モードへとモード転換し、ステップS02の処理に戻る。
【0073】
上述したように、本実施形態に係る便器装置CAは、便器2と、便器2から汚物を搬送するための洗浄水を供給する給水手段(給水装置3、便器給水路3a、給水弁3b)と、便器2から洗浄水によって搬送された汚物を粉砕し、粉砕された汚物を圧送して排出管16へ排出する処理装置4と、を備える。
【0074】
処理装置4は、便器2から搬送される汚物を溜める貯留槽10(粉砕室21)と、貯留槽10(粉砕室21)に溜められた汚物を回転動作によって粉砕する粉砕手段(底板26、周壁23)と、粉砕された汚物を回転動作によって排出管16へ圧送する圧送手段(インペラ29)と、底板26及びインペラ29を回転駆動する駆動手段(モーター24)と、貯留槽10に異物が混入したことを検知する検知手段(制御装置5)と、検知結果を取得し、モーター24を駆動制御する制御手段(制御装置5)と、を有している。
【0075】
粉砕手段である底板26及び周壁23は、貯留槽10(粉砕室21)に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能なように構成されている。制御装置5は、貯留槽10(粉砕室21)への異物の混入を検知した後、底板26及び周壁23による汚物粉砕動作が継続可能な場合には、モーター24による底板26の回転駆動を継続させつつ、貯留槽10(粉砕室21)内に異物が存在することを報知する報知動作を行う継続運転モード(注意報洗浄モード、警報洗浄モード、報知動作1〜3)を実行する。
【0076】
本実施形態によれば、粉砕手段である底板26及び周壁23が、貯留槽10(粉砕室21)に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能なように構成されているので、お尻拭きシートのように誤って投入されやすく且つ粉砕し難い異物が混入しても、便器装置CAの使用を継続することができる。
【0077】
本実施形態の制御装置5は、貯留槽10(粉砕室21)への異物の混入を検知した後、粉砕手段の汚物粉砕動作が継続可能な場合には、継続運転モードを実行するものである。継続運転モードは、モーター24による粉砕手段の回転駆動を継続させつつ、貯留槽10(粉砕室21)内に異物が存在することを報知する報知動作を行うものである。従って、貯留槽10(粉砕室21)へ異物が混入したとしても粉砕手段による粉砕動作が継続可能である範囲において便器装置CAの使用が可能になる一方で、異物が混入されながら運転が継続されていることを使用者に認知させることができる。
【0078】
また本実施形態に係る便器装置CAでは、制御装置5は、継続運転モードにおいて、貯留槽10(粉砕室21)への異物の混入を検知した後の粉砕手段の粉砕性能を、便器装置CAの使用回数に応じて低下させ、当該粉砕性能の低下によって異物の存在を報知するものとしている。
【0079】
このように、モーター24による回転駆動を抑制することで粉砕手段の粉砕性能を低下させ、その粉砕性能の低下によって異物の存在を報知するので、便器装置CAの使用状態を緩やかに制限して使用者に正常な状態ではないことを認識させつつ、継続使用を許容することができる。粉砕手段の粉砕性能は、異物混入後の使用回数に応じて低下させるので、便器装置CAの制限的な使用状態を徐々に強めることで、異物の存在を確実に使用者に認識させることができる。
【0080】
また本実施形態に係る便器装置CAでは、制御装置5は、継続運転モードにおいて、便器装置CAの使用回数が閾値回数を超えた場合には、モーター24を停止させて粉砕手段の粉砕動作を停止させる。このように、便器装置CAの使用回数が閾値回数を超えた場合には、モーター24を停止させて粉砕手段の粉砕動作を停止させることで、使用者に異物の存在を確実に認識させ、便器装置CAの基本的な性能を担保させることができる。
【0081】
また本実施形態に係る便器装置CAでは、継続運転モードは、第一継続運転モードである注意報洗浄モードと第二継続運転モードである警報洗浄モードとを有している。貯留槽10(粉砕室21)へ異物が混入していない通常モードにおける粉砕手段の回転数に対する回転抑制度合いが、注意報洗浄モードにおける回転抑制度合いよりも、警報洗浄モードにおける回転抑制度合いが大きくなるように構成されている。
【0082】
このように、通常モードにおける粉砕手段の回転数(2500rpm)に対する回転抑制度合いが、注意報洗浄モード(回転数が1500rpm)における回転抑制度合い(−1000rpm)よりも、警報洗浄モード(回転数が1000rpm)における回転抑制度合い(−1500rpm)が大きくなるように構成されているので、段階的に粉砕手段の回転数を抑制することが可能となる。従って、使用者に対しては、注意報洗浄モードから警報洗浄モードへの切替によって、その間の回転数のギャップを確実に認識させ、異物が混入した運転状態であることを確実に認識させることができる。
【0083】
また本実施形態に係る便器装置CAでは、注意報洗浄モードは、継続運転モードの最初に実行される運転モードであって、通常モードにおける粉砕手段の回転数(2500rpm)から注意報洗浄モードにおける回転数(1500rpm)への低減幅(−1000rpm)が、注意報洗浄モードにおける粉砕手段の回転数(1500rpm)から警報洗浄モードにおける回転数(1000rpm)への低減幅(−500rpm)よりも大きくなるように構成されている。このように、異物が混入した最初の段階で大きく粉砕性能が抑制されるので、使用者に異物が混入した運転状態であることを確実に認識させることができる。
【0084】
また本実施形態に係る便器装置CAでは、継続運転モードは、警報洗浄モードの後であって、継続運転モードの最後に実行される停止モードを有し、注意報洗浄モードにおける粉砕手段の回転数(1500rpm)から警報洗浄モードにおける回転数(1000rpm)への低減幅(−500rpm)よりも、警報洗浄モードにおける回転数(1000rpm)から停止モードにおける回転数(0rpm)への低減幅(−1000rpm)が大きくなるように構成されている。このように、異物が混入し継続運転モードを実行している最後の段階で大きく粉砕性能が抑制されるので、使用者に粉砕性能が落ち込んだことを確実に認識させることができる。
【0085】
また本実施形態に係る便器装置CAでは、制御装置5が行う報知動作1〜3は、使用者に対する警告を発するものであって、制御装置5は、継続運転モードにおいて、貯留槽10(粉砕室21)への異物の混入を検知した後の警告度合いを、便器装置CAの使用回数に応じて高めることも好ましい。このように、貯留槽10(粉砕室21)への異物の混入を検知した後の警告度合いを徐々に強めると、異物の存在を確実に使用者に認識させることができる。
【0086】
以上、具体例を参照しつつ本発明の実施の形態について説明した。しかし、本発明はこれらの具体例に限定されるものではない。すなわち、これら具体例に、当業者が適宜設計変更を加えたものも、本発明の特徴を備えている限り、本発明の範囲に包含される。例えば、前述した各具体例が備える各要素およびその配置、材料、条件、形状、サイズなどは、例示したものに限定されるわけではなく適宜変更することができる。また、前述した各実施の形態が備える各要素は、技術的に可能な限りにおいて組み合わせることができ、これらを組み合わせたものも本発明の特徴を含む限り本発明の範囲に包含される。
【符号の説明】
【0087】
2:便器
2a:ボウル部
2b:搬送管路
2c:排水口
2d:フラップ弁
3:給水装置
3a:便器給水路
3b:給水弁
4:処理装置
5:制御装置
6a:スピーカー
6b:報知ランプ
7a:水位検知センサー
7b:着座検知センサー
7c:リモートコントローラー
10:貯留槽
11:側壁
12:底壁
12a:開口
14:ポンプ室
15:排出口
16:排出管
20:粉砕圧送部
21:粉砕室
22:周壁
22a:孔
23:底壁
23a:孔
24:モーター
25:回転軸
25a:部分
26:底板
29:インペラ
A:汚物
CA:便器装置
【技術分野】
【0001】
本発明は、便器と、便器から汚物を搬送するための洗浄水を供給する給水手段と、便器から洗浄水によって搬送された汚物を粉砕し、粉砕された汚物を圧送して排出管へ排出する処理装置と、を備える便器装置に関する。
【背景技術】
【0002】
従来から、戸建て住宅や集合住宅のトイレでは、トイレから下水までの排水管の傾斜勾配を利用して排水が行なわれている。このような排水管の傾斜勾配を利用するものは、トイレから下水まで排水管を設置するにあたっては、建築時に排水管を設置するものであるから、後からトイレを増設したり移設する場合には、トイレを設置する場所の床をはがして地面を掘り起こしたりする等、設置工事の作業に負担がかかり、現実的には増設や移設は困難なものであった。また、トイレを設置する場所から下水までに排水管を通す必要があるため、住宅の間取りと排水管の設置位置によってはトイレの設置場所が制限されて自由にレイアウトできないといった事情もある。このような工事負担を低減し、レイアウトの自由度を確保する観点から、トイレから下水へ排水を圧送する圧送装置を備えた圧送式トイレが開発されている(例えば、下記特許文献1参照)。
【0003】
下記特許文献1に記載されている圧送式トイレは、当該文献においては詳述されていないけれども、建築躯体側の排水管に着脱可能なホースを接続して用いることが可能なものである。この圧送式トイレは、排水管に接続可能なアダプタが設けられている場所であれば、その場所に移動させて使用することが可能なものでもある。
【0004】
具体的な構成として、この圧送式トイレは、便器本体に繋がる貯留槽内に、モーター、このモーターに連結された回転軸、この回転軸に取り付けられた粉砕歯、及びインペラを備えている。使用者が便器の使用後に洗浄水を流すと、洗浄水と共に汚物が貯留槽の供給口を介して粉砕室内へ搬送される。この搬送にあわせて、モーターが作動することにより、回転軸が回転し、この回転軸の回転に伴って、粉砕歯及びインペラが回転する。
【0005】
汚物は、モーターにより回転駆動された粉砕歯によって粉砕され、粉砕室の周壁及び底壁に設けられた孔を通過し、粉砕室から流れ出る。粉砕室から流れ出た粉砕後の汚物は、モーターにより駆動されたインペラの回転によって、洗浄水と共にホースを経由して排水管へと圧送される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−328641号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述した圧送式トイレは、便器本体から流入する汚物を粉砕し、建築躯体側の排水管に繋がるホースを経由して下水に粉砕後の汚物を流すものである。圧送式トイレの可搬性を確保する観点から、このホースの径を建築躯体側の排水管と同等の太さにすることは困難であり、排水管に比較して小径のものが用いられる。このような小径のホースを経由して汚物を流す必要性から、上述したように汚物を粉砕するものであるから、汚物は確実に粉砕する必要がある。
【0008】
一方、便器本体には汚物以外の異物が誤って流される場合がある。このような異物の例としては、硬質の異物であるライターや、軟質の異物であるお尻拭きシートといったものがある。硬質の異物であるライターが粉砕し難いのはもちろんのこと、軟質の異物であるお尻拭きシートも粉砕し難いものである。このような異物が誤って便器本体に流されると、回転する粉砕歯と貯留槽との間に噛み込まれてしまい、モーターの回転を阻害する場合があった。モーターの回転が阻害されれば、インペラの回転も阻害され、汚物の排出もできなくなってしまい、圧送式トイレそのものが使用不可能になってしまう場合があった。
【0009】
従って、圧送式トイレのような便器装置は、可搬性を考慮しない従来の通常のトイレよりも、異物の混入に対する許容度は低くならざるを得ない。しかしながら、実際にこのような可搬性のある便器装置を用いるのは、介護の現場なども多く、お尻拭きシートを用いたり、紙おむつを用いたりする場合が多いため、それら軟質の異物が誤って便器本体に流されてしまうことは避け難いものである。
【0010】
便器装置の機構保護の観点からは、貯留槽に異物が入り込んだ場合には、即座に粉砕歯やインペラの回転を停止し、異物を取り除くことが好ましいものである。しかしながら、異物は貯留槽内に留まるものであるから、それを取り除くには貯留槽内に手を入れる必要があり、一般の使用者にそのような作業をさせることは困難である。従って、貯留槽内の異物を取り除くために、専門のサービススタッフが現場に行って作業を行う必要がある。このように、専門のサービススタッフを現場に呼び、異物を取り除く作業をしてもらい、便器装置の使用可能状態が回復するまでには、相応の時間が必要になる。上述したように、このような便器装置が用いられるのは、介護の現場も多いことから、使用者が代替のトイレまで行けないことも多く、便器装置の使用不可期間が長引くことは避けたいものである。特に介護の現場では、排便調整に用いる下剤や浣腸の作用によって、持続的に排便を行う場合があり、このような場面で便器装置が使えなくなると、その不便さは通常のトイレの比ではない。
【0011】
そこで本発明者らは、異物が混入しても、回転する粉砕歯と貯留槽との間に噛み込まれず、継続使用が可能な便器装置を検討した。貯留槽に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能な構成はいろいろと想起されるものであるが、いずれにしても噛み込みを起こさずに汚物のみを粉砕する構成となるものである。従って、貯留槽内に混入した異物は、粉砕されることなく残留することになる。特に、お尻拭きシートのように、繊維を樹脂で固めて成形されたものが混入すると、それ自体は水には溶けないものであるから、貯留槽内に残留し続けることになる。異物が混入しても、回転する粉砕歯と貯留槽との間に噛み込まれないような便器装置であっても、異物が残留し続ければいずれは不具合に繋がるおそれがあり、何らかの対策が必要になることを本発明者らは見出したものである。
【0012】
本発明はこのような課題に鑑みてなされたものであり、その目的は、汚物を粉砕して排出することが可能な便器装置であって、異物が混入した場合であっても継続使用を可能としつつ、内部機構に不具合が発生する前に異物を除去することが可能な便器装置を提供することにある。
【課題を解決するための手段】
【0013】
上記課題を解決するために本発明に係る便器装置は、便器と、前記便器から汚物を搬送するための洗浄水を供給する給水手段と、前記便器から洗浄水によって搬送された汚物を粉砕し、粉砕された汚物を圧送して排出管へ排出する処理装置と、を備える。前記処理装置は、前記便器から搬送される汚物を溜める貯留槽と、前記貯留槽に溜められた汚物を回転動作によって粉砕する粉砕手段と、前記粉砕手段によって粉砕された汚物を回転動作によって排出管へ圧送する圧送手段と、前記粉砕手段及び前記圧送手段を回転駆動する駆動手段と、前記貯留槽に異物が混入したことを検知する検知手段と、前記検知手段の検知結果を取得し、前記駆動手段を駆動制御する制御手段と、を有している。前記粉砕手段は、前記貯留槽に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能なように構成されている。前記制御手段は、前記貯留槽への異物の混入を検知した後、前記粉砕手段の汚物粉砕動作が継続可能な場合には、前記駆動手段による前記粉砕手段の回転駆動を継続させつつ、前記貯留槽内に異物が存在することを報知する報知動作を行う継続運転モードを実行する。
【0014】
本発明によれば、粉砕手段が、貯留槽に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能なように構成されているので、お尻拭きシートのように誤って投入されやすく且つ粉砕し難い異物が混入しても、便器装置の使用を継続することができる。本発明の制御手段は、貯留槽への異物の混入を検知した後、粉砕手段の汚物粉砕動作が継続可能な場合には、継続運転モードを実行するものである。本発明の継続運転モードは、駆動手段による粉砕手段の回転駆動を継続させつつ、貯留槽内に異物が存在することを報知する報知動作を行うものである。従って、貯留槽へ異物が混入したとしても粉砕手段による粉砕動作が継続可能である範囲において便器装置の使用が可能になる一方で、異物が混入されながら運転が継続されていることを使用者に認知させることができる。例えば、本発明に係る便器装置を介護の現場に用いれば、お尻拭きシートのように誤って投入されやすい異物が混入し、即座の修理対応が間に合わないような場合であっても、便器装置の使用を継続することができる。そして、そのように異物が混入された状態で使用が継続されていることを使用者は認知することができるので、便器装置の使用が継続されている間に修理対応のために専門業者を呼ぶことが可能となる。従って、貯留槽内に異物が過度に残留し、粉砕手段が作動不能な状態に陥ってしまうことを防止できる。
【0015】
また本発明に係る便器装置では、前記制御手段は、前記継続運転モードにおいて、前記貯留槽への異物の混入を検知した後の前記粉砕手段の粉砕性能を、前記便器装置の使用回数に応じて前記駆動手段による回転駆動を抑制することで低下させ、当該粉砕性能の低下によって異物の存在を報知することも好ましい。
【0016】
この好ましい態様では、駆動手段による回転駆動を抑制することで粉砕手段の粉砕性能を低下させ、その粉砕性能の低下によって異物の存在を報知するので、便器装置の使用状態を緩やかに制限して使用者に正常な状態ではないことを認識させつつ、継続使用を許容することができる。粉砕手段の粉砕性能は、異物混入後の使用回数に応じて低下させるので、便器装置の制限的な使用状態を徐々に強めることで、異物の存在を確実に使用者に認識させることができる。
【0017】
また本発明に係る便器装置では、前記制御手段は、前記継続運転モードにおいて、前記便器装置の使用回数が閾値回数を超えた場合には、前記駆動手段を停止させて前記粉砕手段の粉砕動作を停止させることも好ましい。
【0018】
本発明に係る便器装置の粉砕手段は、貯留槽に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能なように構成されている。従って、異物が混入しても、便器装置の使用を継続することができる。しかしながら、異物は粉砕し難いものであり、水溶性でも無い場合があるので、異物が混入した状態で過度に継続運転を許容すれば、粉砕手段が異物を噛み込んでロックしてしまう場合も想定される。また、粉砕性能を過度に低下させれば、通常の汚物も粉砕することができなくなり、便器装置本来の基本的な性能が満たされなくなるおそれがある。そこでこの好ましい態様では、便器装置の使用回数が閾値回数を超えた場合には、駆動手段を停止させて粉砕手段の粉砕動作を停止させることで、使用者に異物の存在を確実に認識させ、便器装置の基本的な性能を担保させることができる。
【0019】
また本発明に係る便器装置では、前記継続運転モードは、少なくとも第一継続運転モードと第二継続運転モードとを有しており、前記貯留槽へ異物が混入していない通常モードにおける前記粉砕手段の回転数に対する回転抑制度合いが、前記第一継続運転モードにおける回転抑制度合いよりも、前記第二継続運転モードにおける回転抑制度合いが大きくなるように構成され、前記制御手段は、前記第一継続運転モードの後に前記第二継続運転モードを実行することも好ましい。
【0020】
この好ましい態様では、継続運転モードを少なくとも二つの運転モードで構成し、その運転モードは、第一継続運転モード及びその後に実行される第二継続運転モードを含むので、段階的な報知動作を行うことが可能となる。具体的には、通常モードにおける粉砕手段の回転数に対する回転抑制度合いが、第一継続運転モードにおける回転抑制度合いよりも、第二継続運転モードにおける回転抑制度合いが大きくなるように構成されているので、段階的に粉砕手段の回転数を抑制することが可能となる。従って、使用者に対しては、第一継続運転モードから第二継続運転モードへの切替によって、その間の回転数のギャップを確実に認識させ、異物が混入した運転状態であることを確実に認識させることができる。
【0021】
また本発明に係る便器装置では、前記第一継続運転モードは、前記継続運転モードの最初に実行される運転モードであって、前記通常モードにおける前記粉砕手段の回転数から前記第一継続運転モードにおける回転数への低減幅が、前記第一継続運転モードにおける前記粉砕手段の回転数から前記第二継続運転モードにおける回転数への低減幅よりも大きいことも好ましい。
【0022】
この好ましい態様では、最初に粉砕手段の回転数を抑制するモードである第一継続運転モードに入った際の回転数の低減幅が、その後の第二継続運転モードに入った際の回転数の低減幅よりも大きいように構成している。従って、異物が混入した最初の段階で大きく粉砕性能が抑制されるので、使用者に異物が混入した運転状態であることを確実に認識させることができる。
【0023】
また本発明に係る便器装置では、前記継続運転モードは、前記第二継続運転モードの後であって、前記継続運転モードの最後に実行される第三継続運転モードを有し、前記第一継続運転モードにおける前記粉砕手段の回転数から前記第二継続運転モードにおける回転数への低減幅よりも、前記第二継続運転モードにおける前記粉砕手段の回転数から前記第三継続運転モードにおける回転数への低減幅が大きいことも好ましい。
【0024】
この好ましい態様では、最後に粉砕手段の回転数を抑制するモードである第三継続運転モードに入った際の回転数の低減幅が、その前の第二継続運転モードに入った際の回転数の低減幅よりも大きいように構成している。従って、異物が混入し継続運転モードを実行している最後の段階で大きく粉砕性能が抑制されるので、使用者に粉砕性能が落ち込んだことを確実に認識させることができる。
【0025】
また本発明に係る便器装置では、前記制御手段が行う報知動作は、使用者に対する警告を発するものであって、前記制御手段は、前記継続運転モードにおいて、前記貯留槽への異物の混入を検知した後の警告度合いを、前記便器装置の使用回数に応じて高めることも好ましい。
【0026】
この好ましい態様では、使用者の聴覚や視覚といった五感を刺激する警告を発することによって異物の存在を報知するので、使用者に正常な状態ではないことを認識させつつ、継続使用を許容することができる。更に、貯留槽への異物の混入を検知した後の警告度合いを徐々に強めるので、異物の存在を確実に使用者に認識させることができる。
【発明の効果】
【0027】
本発明によれば、異物が混入した場合であっても継続使用を可能としつつ、内部機構に不具合が発生する前に異物を除去することが可能な便器装置を提供することができる。
【図面の簡単な説明】
【0028】
【図1】本発明の実施形態である便器装置の構成を概念的に示す概略構成図である。
【図2】図1に示す便器装置に含まれる処理装置の構成を概念的に示す概略構成図である。
【図3】図1に示す便器装置の制御的な構成を示すブロック構成図である。
【図4】図1に示す便器装置の動作を示すフローチャートである。
【図5】図4に示す動作を実行した場合の駆動状態を示すタイミングチャートである。
【発明を実施するための形態】
【0029】
以下、添付図面を参照しながら本発明の実施の形態について説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては可能な限り同一の符号を付して、重複する説明は省略する。
【0030】
本発明の実施形態である便器装置CAについて、図1を参照しながら説明する。図1は、便器装置の構成を概念的に示す概略構成図である。図1に示すように、便器装置CAは、便器2と、給水装置3(給水手段)と、処理装置4と、制御装置5(制御手段、検知手段)と、を備えている。
【0031】
便器2は、ボウル部2aと、搬送管路2bと、排水口2cと、フラップ弁2dとを有している。ボウル部2aは、排便や拭き取り紙といった汚物を受け止める凹面が形成されてなる部分である。ボウル部2aの下方には、処理装置4に繋がる搬送管路2bが設けられている。ボウル部2aが受け止めた汚物は、洗浄水によって搬送管路2bへと送り出される。便器2の形式は特に限定されるものではなく、サイホン式やサイホンジェット式の便器であってもよい。
【0032】
搬送管路2bの処理装置4側末端には、排水口2cが設けられている。搬送管路2bは、処理装置4内に挿入され、排水口2cは処理装置4内に開口している。排水口2cには、排水口2cを開閉するためのフラップ弁2dが設けられている。フラップ弁2dは、制御装置5からの指示信号に応じて、開閉可能なように構成されている。
【0033】
給水装置3は、便器2に洗浄水を供給するための装置である。便器2への洗浄水供給方式は、状況に応じて適切なものが選択されうる。例えば、給水装置3としてタンクを設け、そのタンクに貯水し、貯めた洗浄水を便器2に流すように構成することも好ましいものである。また、建築躯体側の水道に直結し、洗浄水として給水を受け、便器2に流すように構成することも好ましいものである。このように、給水装置3は、便器2に洗浄水を供給するあらゆる手段が採用されうるものである。
【0034】
給水装置3と便器2とは、便器給水路3a(給水手段)によって繋がれている。便器給水路3aには、当該水路を開閉可能な給水弁3b(給水手段)が設けられている。給水弁3bは、制御装置5からの指示信号に応じて、開閉可能なように構成されている。給水弁3bが開かれると、給水装置3から供給された洗浄水が、便器給水路3aを通って便器2のボウル部2aへ流し込まれる。この洗浄水のボウル部2aへの流入によって、ボウル部2aが受け止めた汚物が、搬送管路2bを通って処理装置4へと送り込まれる。給水弁3bが閉じられると、給水装置3から供給される洗浄水が停止される。
【0035】
処理装置4は、貯留槽10と、粉砕圧送部20(粉砕手段、圧送手段)とを有している。粉砕圧送部20は、貯留槽10内に設けられている。貯留槽10及び粉砕圧送部20の下部には、排出管16が繋がれており、排出管16は建築躯体側の排水管に繋がれている。
【0036】
貯留槽10は、便器2から送り込まれる汚物を一時的に受け入れる部分である。粉砕圧送部20は、貯留槽10に貯められた汚物を回転動作によって粉砕し、その粉砕された汚物を排出管へと圧送する部分である。
【0037】
粉砕圧送部20は、モーター24(駆動手段)と、回転軸25(駆動手段)と、底板26(粉砕手段)とを有している。制御装置5からの指示信号によってモーター24が回転すると、モーター24の回転軸25が回転駆動される。回転軸25には、底板26(粉砕手段)とインペラ29(圧送手段)が取り付けられている。底板26及びインペラ29は、回転軸25の回転駆動に応じて回転駆動される。
【0038】
制御装置5には、使用者に情報を報知するための報知手段として機能するスピーカー6a及び報知ランプ6bが設けられている。
【0039】
続いて、処理装置4の構成について図2を参照しながら説明する。図2は、処理装置4の内部構成を示すべく模式的に断面図として描かれた図である。
【0040】
処理装置4は、貯留槽10と粉砕圧送部20とを有している。粉砕圧送部20は、貯留槽10の内部に納められている。貯留槽10は、便器2から搬送されてきた洗浄水と汚物とを溜めるように構成された中空の容器である。貯留槽10は、側壁11及び底壁12を有している。貯留槽10は、底壁12の周囲に立設された側壁11が囲む空間に、洗浄水及び汚物を貯めることができるように構成されている。
【0041】
側壁11には、便器2の搬送管路2bが貫通されている。側壁11を貫通した搬送管路2bは、粉砕圧送部20に繋がっている。
【0042】
底壁12には、開口12aが形成されている。この開口12aを塞ぐと共に、底壁12から下方へ突出するように、ポンプ室14が取り付けられている。このポンプ室14には、排出口15が形成されている。この排出口15には、排出管16が連結されている。排出管16は、排出口15から横方向へ延びた後、上方へと延びている(図1参照)。排出管16は、アタッチメントなどによって、建築躯体側の排水管に繋がれている。従って、排出口15から送り出された汚物は、排出管16から排水管を通って下水へと流される。
【0043】
貯留槽10には、便器2から排水された洗浄水を滞りないようにして排水するべく、貯留槽10内に存在している空気を貯留槽10の外部へと排出させる通気管(図示せず)なるものが設けられている。
【0044】
粉砕圧送部20は、粉砕室21と、モーター24と、回転軸25と、インペラ29と、底板26とを有している。
【0045】
粉砕室21は、貯留槽10内に配置された有底円筒状の部分であって、底壁23と、底壁23の外周から立ち上がるように形成される筒状の周壁22とを有している。底板26は、円板状を成しており、粉砕室21の底壁23の上部に位置するように設けられている。底板26の上方には、洗浄水及び汚物を受け入れる空間が確保されている。
【0046】
周壁22は、貯留槽10の側壁11の内側に沿って設けられている。周壁22には、洗浄水や小さな汚物が通過できる複数の孔22aが形成されている。周壁22に形成された孔22aは、周壁22のうち、底板26の高さ付近には設けられておらず、底板26よりも所定高さだけ上方から更に上方の領域に形成されている。また、孔22aは、下方よりも上方に形成されたものほど、孔開口面積が大きくなるように形成されている。
【0047】
周壁22は、底板26の周方向の少なくとも一部に沿って、波状となるような凹凸形状を有している。この凹凸形状は曲面状である。この凹凸形状は、異物が引っかからないように、滑らかな曲面状であることが好ましい。なお、上記凹凸形状は、周壁22の高さ方向全域にわたって形成してもよいし、周壁22のうち底板26の側方に対応する高さ位置及びその上下の所定範囲のみに形成してもよい。
【0048】
このように周壁22を構成することで、本実施形態では、対流や旋回を伴う攪拌によって、又は、底板26の回転による遠心力によって、汚物が周壁22へ押し付けられる。汚物が周壁22に押し付けられることで、汚物へ局所的な又は集中的な外力を与え、汚物に局所的又は集中的な応力を発生させることができる。また、汚物が周壁22内を水流と共に旋回するときに、周壁22の凸部に衝突する。この衝突によって、汚物へ局所的な又は集中的な外力を与え、局所的又は集中的な応力を発生させることができる。本実施形態では、このような粉砕手法を採用することで、異物が混入した場合であっても、噛み込みが発生し難いように構成されている。従って、汚物に混じって若しくは汚物に代わって異物が混入した場合であっても、汚物の粉砕動作を継続することができるように構成されている。
【0049】
一般に、平面視で円形の周壁に汚物が衝突した場合には、汚物と周壁との接触面積が大きく、汚物が周壁の周面に沿って移動し易いので、汚物に対する衝撃が弱まるおそれがある。これに対して、本実施形態では、汚物Aが周壁22に形成された凹凸面のうち内側へ突出する凸部の頂部へ衝突することにより、汚物Aを確実に粉砕することができる。なお、本実施形態では、周壁22が曲面状の凹凸形状を有しているが、汚物Aの粉砕が確実に起こるのであれば、凹凸形状を有しない円筒面を構成するように形成することも好ましい態様である。
【0050】
周壁22には、貯留槽10の側壁11を貫通した搬送管路2bが貫通するように連結されている。従って、搬送管路2bを通って送り込まれる汚物は、粉砕室21内に供給されるように構成されている。
【0051】
底壁23には、回転軸25が貫通するように設けられている。底壁23の回転軸25が貫通する部分の周辺には、粉砕され小さくなった汚物が通過できる複数の孔23aが形成されている。
【0052】
モーター24は、ポンプ室14の下部に配置されている。モーター24は、制御装置5から出力される指示信号に応じて回転駆動するように構成されている。モーター24には回転軸25が取り付けられており、モーター24の回転駆動によって回転軸25も回転するように構成されている。
【0053】
回転軸25は、モーター24からポンプ室14内を通って粉砕室21まで上方へ延びている。回転軸25の基端部付近であって、ポンプ室14内には、インペラ29が取り付けられている。回転軸25の途中部分であって、粉砕室21の底部付近には、円板状の底板26が取り付けられている。
【0054】
回転軸25には、底板26の上方から先端にかけて、表面の摩擦を大きくするために刻み目が形成されている。摩擦をより大きくするために、回転軸25の表面にラバー等の他の部材を取り付けてもよい。回転軸25の底板26よりも上方の部分25aは、異物捕集手段として機能する部位である。部分25aは、表面の摩擦を大きくすることにより、繊維状のやわらかい異物を引っ掛けて絡ませ易くするように構成されている。
【0055】
インペラ29は、ポンプ室14内に配置されており、底板26と共に回転するように回転軸25に取り付けられている。貯留槽10からポンプ室14内へ流入した汚水は、インペラ29の回転により排出管16へ圧送される。
【0056】
続いて、便器装置CAの制御的な構成について、図3を参照しながら説明する。図3は、便器装置CAの制御的な構成を示すブロック構成図である。図3に示すように、便器装置CAは制御的な構成要素として、制御装置5と、水位検知センサー7aと、着座検知センサー7bと、リモートコントローラー7cと、給水弁3bと、モーター24と、フラップ弁2dと、スピーカー6aと、報知ランプ6bと、を備えている。
【0057】
制御装置5は、他の制御的な構成要素と信号の授受を行うためのインターフェースと、CPUといった演算デバイスと、ROMやRAMといった記憶デバイスとを含むものである。制御装置5は、水位検知センサー7a、着座検知センサー7b、及びリモートコントローラー7cそれぞれか出力される検知信号や操作指示信号を受け取る。制御装置は、それらの検知信号や操作指示信号に基づいて所定の情報処理を行い、給水弁3b、モーター24、フラップ弁2d、スピーカー6a、及び報知ランプ6bに、所定の動作を実行させるための指示信号(制御信号)を出力する。給水弁3b、モーター24、フラップ弁2d、スピーカー6a、及び報知ランプ6bは、この指示信号(制御信号)を受けて所定の動作を実行するように構成されている。尚、本実施形態の場合は、モーター24は、回転数の情報を制御装置5にフィードバックできるように構成されている。
【0058】
続いて、便器装置CAの動作にすいて、図4及び図5を参照しながら説明する。図4は、便器装置CAの動作を示すフローチャートである。図4に示すフローチャートの動作主体は、主に制御装置5である。図5は、洗浄モードに応じたモーター24の回転数を示したグラフである。図5では更に、報知動作についても示している。図5では、通常モードで洗浄動作を行っている際に異物が混入し、注意報洗浄モード、警報洗浄モードと洗浄モードを切り替えていっていることを示している。続く便器装置CAの説明は、主に図4を参照しながら進め、適宜図5を参照するものとする。
【0059】
ステップS01では、試運転モードでの制御を実行し、各種初期値を記憶する。試運転モードに含まれる運転モードは、漏水検知モード、配管・通気管チェックモード、ポンプ初期性能記憶モードである。ポンプ初期性能記憶モードでは、制御装置5からモーター24へ所定の指示信号を出力し、モーター24を回転駆動させる。この際の回転数を示す情報が、モーター24から制御装置5へとフィードバックされる。制御装置5は、これらの情報に基づいて、モーター24の回転数に基づいて判断する際の閾値を調整する。制御装置5は、洗浄モードの情報をリセットし、ステップS02の処理に進む。
【0060】
ステップS01に続くステップS02では、制御装置5は待機モードに移行する。ステップS02に続くステップS03では、設定されている洗浄モードを確認する。最初の運転時であれば、ステップS01において洗浄モードの情報をリセットしてあるので、通常モードとなっている。通常モードの他の洗浄モードとしては、注意報洗浄モード(第一継続運転モード)、警報洗浄モード(第二継続運転モード)、停止モード(第三継続運転モード)がある。
【0061】
ステップS03に続くステップS04では、リモートコントローラー7cから出力される洗浄開始指示信号に基づいて、制御装置5は、給水弁3bに洗浄指示信号を出力する。給水弁3bは、洗浄指示信号に基づいて開弁し、給水装置3から送り出される洗浄水を便器2へと流す。ステップS04に続くステップS05では、便器2が洗浄される。ステップS05における便器2の洗浄に伴って、便器2内の汚物は洗浄水と共に処理装置4へと流される。
【0062】
ステップS05に続くステップS06では、制御装置5はモーター24にスロースタートするように指示信号を出力する。具体的には、制御装置5は、モーター24に200msの間低速で回転するように指示信号を出力する。このように低速でモーター24を回転させるのは、引っ掛かり防止や突入電流低減のためである。
【0063】
ステップS06に続くステップS07では、制御装置5は、モード別運転を実行する。制御装置5はモーター24に、各モードに応じた所定の回転数で回転駆動するように、指示信号を出力する。具体的には、通常モードの場合には2500rpm、注意報洗浄モードの場合には1500rpm、警報洗浄モードの場合には1000rpm、停止モードの場合には0rpm(実質的に回転を停止させる指示)である。
【0064】
モーター24が制御装置5から出力された指示信号に基づいて回転し、回転軸25が回転すると、底板26及びインペラ29も回転する。粉砕圧送部20内に異物が混入していると、通常の汚物が入っている場合に比較して回転継続に必要となるトルクが増大し、実際の回転数は低下する。この現象を利用するため、制御装置5は、モーター24の実回転数のフィードバックを受けている。
【0065】
ステップS07に続くステップS08では、制御装置5が、モーター24の実回転数を取得する。制御装置5は、モーター24の実回転数が、所定の閾値回転数以上となっているか判断する。具体的には、通常モードの場合には閾値回転数が2200rpm、注意報洗浄モードの場合には閾値回転数が1300rpm、警報洗浄モードの場合には閾値回転数が900rpmである。モーター24の実回転数が、閾値回転数以上となっていればステップS09の処理に進み、閾値回転数以上となっていなければステップS16の処理に進む。
【0066】
ステップS09では、粉砕処理の後期段階において、制御装置5が、モーター24の実回転数を取得する。制御装置5は、モーター24の実回転数が、所定の閾値回転数以上となっているか判断する。ステップS09における閾値回転数は、2500rpmである。これは、粉砕処理が終了すれば、異物が混入していなければモーター24の回転数が上昇するはずであることを利用している。従って、モーター24の実回転数が、閾値回転数以上となっていればステップS10の処理に進み、閾値回転数以上となっていなければステップS16の処理に進む。尚、ステップS09では、実質的に通常モードの場合のみの判断となっている。注意報洗浄モードの場合にはモーター24の回転数の上限が1300rpmであり、警報洗浄モードの場合にはモーター24の回転数の上限が900rpmであるためである。これは、注意報洗浄モード及び警報洗浄モードの場合には異物が混入しているのが前提であり、わざわざ噛み込みのおそれのある制御を回避するためである。
【0067】
ステップS10では、制御装置5は、粉砕圧送部20に異物が混入していないと判断する。ステップS10に続くステップS11では、洗浄モードを通常モードに設定する。ステップS11の処理が終了すると、ステップS12の処理に進む。
【0068】
ステップS16では、制御装置5は、粉砕圧送部20に異物が混入していると判断する。制御装置5は、このように粉砕圧送部20に異物が混入していると判断した回数をカウントアップしながら記憶する。ステップS16に続くステップS17では、モーター24の実回転数に応じて洗浄モードを変更する。具体的には、モーター24の実回転数が2200rpm以上であれば通常モードを維持し、モーター24の実回転数が2200rpm未満であれば注意報洗浄モードにモード変更し、モーター24の実回転数が1300rpm未満であれば警報洗浄モードにモード変更し、モーター24の実回転数が900rpm未満であれば停止モードにモード変更する。
【0069】
ステップS17に続くステップS18では、ステップS16で記憶した異物混入後の洗浄回数に基づいて、所定の閾値回数以上となっているか判断する。具体的には、通常モードの場合には閾値回数が5回であり、注意報洗浄モードの場合には閾値回数が100回であり、警報洗浄モードの場合には閾値回数が200回である。異物混入後の洗浄回数が閾値回数以上となっていればステップS19の処理に進み、異物混入後の洗浄回数が閾値回数未満となっていればステップS12の処理に進む。
【0070】
ステップS19では、洗浄モードを変更する。ステップS18での判断の結果、通常モードにおいて異物混入後の洗浄回数が5回以上となっていれば注意報洗浄モードに変更し、注意報モードにおいて異物混入後の洗浄回数が100回以上となっていれば警報洗浄モードに変更し、警報洗浄モードにおいて異物混入後の洗浄回数が200回以上となっていれば停止モードに変更する。
【0071】
ステップS19に続くステップS20では、制御装置5は、洗浄モードに応じた報知モードを選択し、スピーカー6a及び報知ランプ6bを用いた報知動作を実行する。制御装置5は、注意報洗浄モードの場合には報知動作1を実行し、警報洗浄モードの場合には報知動作2を実行し、停止モードの場合には報知動作3を実行する。報知動作1よりも報知動作2の警告度合いがより強く、報知動作2よりも報知動作3の警告度合いが強くなるように報知動作を実行する。ステップS20の処理が終了すると、ステップS12の処理に進む。尚、報知動作と洗浄モードとを必ずしも連動させる必要は無く、異物混入後の洗浄回数に応じて報知動作を切り替えることも好ましい態様である。
【0072】
ステップS12では、制御装置5がモーター24へ停止指示信号を出力する。ステップS12に続くステップS13では、給水装置3においてロータンクへの給水が完了する。ステップS13に続くステップS14では、制御装置5は洗浄モードを記憶する。ステップS14に続くステップS15では、待機モードへとモード転換し、ステップS02の処理に戻る。
【0073】
上述したように、本実施形態に係る便器装置CAは、便器2と、便器2から汚物を搬送するための洗浄水を供給する給水手段(給水装置3、便器給水路3a、給水弁3b)と、便器2から洗浄水によって搬送された汚物を粉砕し、粉砕された汚物を圧送して排出管16へ排出する処理装置4と、を備える。
【0074】
処理装置4は、便器2から搬送される汚物を溜める貯留槽10(粉砕室21)と、貯留槽10(粉砕室21)に溜められた汚物を回転動作によって粉砕する粉砕手段(底板26、周壁23)と、粉砕された汚物を回転動作によって排出管16へ圧送する圧送手段(インペラ29)と、底板26及びインペラ29を回転駆動する駆動手段(モーター24)と、貯留槽10に異物が混入したことを検知する検知手段(制御装置5)と、検知結果を取得し、モーター24を駆動制御する制御手段(制御装置5)と、を有している。
【0075】
粉砕手段である底板26及び周壁23は、貯留槽10(粉砕室21)に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能なように構成されている。制御装置5は、貯留槽10(粉砕室21)への異物の混入を検知した後、底板26及び周壁23による汚物粉砕動作が継続可能な場合には、モーター24による底板26の回転駆動を継続させつつ、貯留槽10(粉砕室21)内に異物が存在することを報知する報知動作を行う継続運転モード(注意報洗浄モード、警報洗浄モード、報知動作1〜3)を実行する。
【0076】
本実施形態によれば、粉砕手段である底板26及び周壁23が、貯留槽10(粉砕室21)に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能なように構成されているので、お尻拭きシートのように誤って投入されやすく且つ粉砕し難い異物が混入しても、便器装置CAの使用を継続することができる。
【0077】
本実施形態の制御装置5は、貯留槽10(粉砕室21)への異物の混入を検知した後、粉砕手段の汚物粉砕動作が継続可能な場合には、継続運転モードを実行するものである。継続運転モードは、モーター24による粉砕手段の回転駆動を継続させつつ、貯留槽10(粉砕室21)内に異物が存在することを報知する報知動作を行うものである。従って、貯留槽10(粉砕室21)へ異物が混入したとしても粉砕手段による粉砕動作が継続可能である範囲において便器装置CAの使用が可能になる一方で、異物が混入されながら運転が継続されていることを使用者に認知させることができる。
【0078】
また本実施形態に係る便器装置CAでは、制御装置5は、継続運転モードにおいて、貯留槽10(粉砕室21)への異物の混入を検知した後の粉砕手段の粉砕性能を、便器装置CAの使用回数に応じて低下させ、当該粉砕性能の低下によって異物の存在を報知するものとしている。
【0079】
このように、モーター24による回転駆動を抑制することで粉砕手段の粉砕性能を低下させ、その粉砕性能の低下によって異物の存在を報知するので、便器装置CAの使用状態を緩やかに制限して使用者に正常な状態ではないことを認識させつつ、継続使用を許容することができる。粉砕手段の粉砕性能は、異物混入後の使用回数に応じて低下させるので、便器装置CAの制限的な使用状態を徐々に強めることで、異物の存在を確実に使用者に認識させることができる。
【0080】
また本実施形態に係る便器装置CAでは、制御装置5は、継続運転モードにおいて、便器装置CAの使用回数が閾値回数を超えた場合には、モーター24を停止させて粉砕手段の粉砕動作を停止させる。このように、便器装置CAの使用回数が閾値回数を超えた場合には、モーター24を停止させて粉砕手段の粉砕動作を停止させることで、使用者に異物の存在を確実に認識させ、便器装置CAの基本的な性能を担保させることができる。
【0081】
また本実施形態に係る便器装置CAでは、継続運転モードは、第一継続運転モードである注意報洗浄モードと第二継続運転モードである警報洗浄モードとを有している。貯留槽10(粉砕室21)へ異物が混入していない通常モードにおける粉砕手段の回転数に対する回転抑制度合いが、注意報洗浄モードにおける回転抑制度合いよりも、警報洗浄モードにおける回転抑制度合いが大きくなるように構成されている。
【0082】
このように、通常モードにおける粉砕手段の回転数(2500rpm)に対する回転抑制度合いが、注意報洗浄モード(回転数が1500rpm)における回転抑制度合い(−1000rpm)よりも、警報洗浄モード(回転数が1000rpm)における回転抑制度合い(−1500rpm)が大きくなるように構成されているので、段階的に粉砕手段の回転数を抑制することが可能となる。従って、使用者に対しては、注意報洗浄モードから警報洗浄モードへの切替によって、その間の回転数のギャップを確実に認識させ、異物が混入した運転状態であることを確実に認識させることができる。
【0083】
また本実施形態に係る便器装置CAでは、注意報洗浄モードは、継続運転モードの最初に実行される運転モードであって、通常モードにおける粉砕手段の回転数(2500rpm)から注意報洗浄モードにおける回転数(1500rpm)への低減幅(−1000rpm)が、注意報洗浄モードにおける粉砕手段の回転数(1500rpm)から警報洗浄モードにおける回転数(1000rpm)への低減幅(−500rpm)よりも大きくなるように構成されている。このように、異物が混入した最初の段階で大きく粉砕性能が抑制されるので、使用者に異物が混入した運転状態であることを確実に認識させることができる。
【0084】
また本実施形態に係る便器装置CAでは、継続運転モードは、警報洗浄モードの後であって、継続運転モードの最後に実行される停止モードを有し、注意報洗浄モードにおける粉砕手段の回転数(1500rpm)から警報洗浄モードにおける回転数(1000rpm)への低減幅(−500rpm)よりも、警報洗浄モードにおける回転数(1000rpm)から停止モードにおける回転数(0rpm)への低減幅(−1000rpm)が大きくなるように構成されている。このように、異物が混入し継続運転モードを実行している最後の段階で大きく粉砕性能が抑制されるので、使用者に粉砕性能が落ち込んだことを確実に認識させることができる。
【0085】
また本実施形態に係る便器装置CAでは、制御装置5が行う報知動作1〜3は、使用者に対する警告を発するものであって、制御装置5は、継続運転モードにおいて、貯留槽10(粉砕室21)への異物の混入を検知した後の警告度合いを、便器装置CAの使用回数に応じて高めることも好ましい。このように、貯留槽10(粉砕室21)への異物の混入を検知した後の警告度合いを徐々に強めると、異物の存在を確実に使用者に認識させることができる。
【0086】
以上、具体例を参照しつつ本発明の実施の形態について説明した。しかし、本発明はこれらの具体例に限定されるものではない。すなわち、これら具体例に、当業者が適宜設計変更を加えたものも、本発明の特徴を備えている限り、本発明の範囲に包含される。例えば、前述した各具体例が備える各要素およびその配置、材料、条件、形状、サイズなどは、例示したものに限定されるわけではなく適宜変更することができる。また、前述した各実施の形態が備える各要素は、技術的に可能な限りにおいて組み合わせることができ、これらを組み合わせたものも本発明の特徴を含む限り本発明の範囲に包含される。
【符号の説明】
【0087】
2:便器
2a:ボウル部
2b:搬送管路
2c:排水口
2d:フラップ弁
3:給水装置
3a:便器給水路
3b:給水弁
4:処理装置
5:制御装置
6a:スピーカー
6b:報知ランプ
7a:水位検知センサー
7b:着座検知センサー
7c:リモートコントローラー
10:貯留槽
11:側壁
12:底壁
12a:開口
14:ポンプ室
15:排出口
16:排出管
20:粉砕圧送部
21:粉砕室
22:周壁
22a:孔
23:底壁
23a:孔
24:モーター
25:回転軸
25a:部分
26:底板
29:インペラ
A:汚物
CA:便器装置
【特許請求の範囲】
【請求項1】
便器と、前記便器から汚物を搬送するための洗浄水を供給する給水手段と、前記便器から洗浄水によって搬送された汚物を粉砕し、粉砕された汚物を圧送して排出管へ排出する処理装置と、を備える便器装置であって、
前記処理装置は、
前記便器から搬送される汚物を溜める貯留槽と、
前記貯留槽に溜められた汚物を回転動作によって粉砕する粉砕手段と、
前記粉砕手段によって粉砕された汚物を回転動作によって排出管へ圧送する圧送手段と、
前記粉砕手段及び前記圧送手段を回転駆動する駆動手段と、
前記貯留槽に異物が混入したことを検知する検知手段と、
前記検知手段の検知結果を取得し、前記駆動手段を駆動制御する制御手段と、を有し、
前記粉砕手段は、前記貯留槽に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能なように構成され、
前記制御手段は、前記貯留槽への異物の混入を検知した後、前記粉砕手段の汚物粉砕動作が継続可能な場合には、前記駆動手段による前記粉砕手段の回転駆動を継続させつつ、前記貯留槽内に異物が存在することを報知する報知動作を行う継続運転モードを実行することを特徴とする便器装置。
【請求項2】
前記制御手段は、前記継続運転モードにおいて、前記貯留槽への異物の混入を検知した後の前記粉砕手段の粉砕性能を、前記便器装置の使用回数に応じて前記駆動手段による回転駆動を抑制することで低下させ、当該粉砕性能の低下によって異物の存在を報知することを特徴とする請求項1に記載の便器装置。
【請求項3】
前記制御手段は、前記継続運転モードにおいて、前記便器装置の使用回数が閾値回数を超えた場合には、前記駆動手段を停止させて前記粉砕手段の粉砕動作を停止させることを特徴とする請求項2に記載の便器装置。
【請求項4】
前記継続運転モードは、少なくとも第一継続運転モードと第二継続運転モードとを有しており、
前記貯留槽へ異物が混入していない通常モードにおける前記粉砕手段の回転数に対する回転抑制度合いが、前記第一継続運転モードにおける回転抑制度合いよりも、前記第二継続運転モードにおける回転抑制度合いが大きくなるように構成され、
前記制御手段は、前記第一継続運転モードの後に前記第二継続運転モードを実行することを特徴とする請求項3に記載の便器装置。
【請求項5】
前記第一継続運転モードは、前記継続運転モードの最初に実行される運転モードであって、
前記通常モードにおける前記粉砕手段の回転数から前記第一継続運転モードにおける回転数への低減幅が、前記第一継続運転モードにおける前記粉砕手段の回転数から前記第二継続運転モードにおける回転数への低減幅よりも大きいことを特徴とする請求項4に記載の便器装置。
【請求項6】
前記継続運転モードは、前記第二継続運転モードの後であって、前記継続運転モードの最後に実行される第三継続運転モードを有し、
前記第一継続運転モードにおける前記粉砕手段の回転数から前記第二継続運転モードにおける回転数への低減幅よりも、前記第二継続運転モードにおける前記粉砕手段の回転数から前記第三継続運転モードにおける回転数への低減幅が大きいことを特徴とする請求項5に記載の便器装置。
【請求項7】
前記制御手段が行う報知動作は、使用者に対する警告を発するものであって、
前記制御手段は、前記継続運転モードにおいて、前記貯留槽への異物の混入を検知した後の警告度合いを、前記便器装置の使用回数に応じて高めることを特徴とする請求項1に記載の便器装置。
【請求項1】
便器と、前記便器から汚物を搬送するための洗浄水を供給する給水手段と、前記便器から洗浄水によって搬送された汚物を粉砕し、粉砕された汚物を圧送して排出管へ排出する処理装置と、を備える便器装置であって、
前記処理装置は、
前記便器から搬送される汚物を溜める貯留槽と、
前記貯留槽に溜められた汚物を回転動作によって粉砕する粉砕手段と、
前記粉砕手段によって粉砕された汚物を回転動作によって排出管へ圧送する圧送手段と、
前記粉砕手段及び前記圧送手段を回転駆動する駆動手段と、
前記貯留槽に異物が混入したことを検知する検知手段と、
前記検知手段の検知結果を取得し、前記駆動手段を駆動制御する制御手段と、を有し、
前記粉砕手段は、前記貯留槽に異物が混入した場合であっても回転動作による汚物の粉砕を継続することが可能なように構成され、
前記制御手段は、前記貯留槽への異物の混入を検知した後、前記粉砕手段の汚物粉砕動作が継続可能な場合には、前記駆動手段による前記粉砕手段の回転駆動を継続させつつ、前記貯留槽内に異物が存在することを報知する報知動作を行う継続運転モードを実行することを特徴とする便器装置。
【請求項2】
前記制御手段は、前記継続運転モードにおいて、前記貯留槽への異物の混入を検知した後の前記粉砕手段の粉砕性能を、前記便器装置の使用回数に応じて前記駆動手段による回転駆動を抑制することで低下させ、当該粉砕性能の低下によって異物の存在を報知することを特徴とする請求項1に記載の便器装置。
【請求項3】
前記制御手段は、前記継続運転モードにおいて、前記便器装置の使用回数が閾値回数を超えた場合には、前記駆動手段を停止させて前記粉砕手段の粉砕動作を停止させることを特徴とする請求項2に記載の便器装置。
【請求項4】
前記継続運転モードは、少なくとも第一継続運転モードと第二継続運転モードとを有しており、
前記貯留槽へ異物が混入していない通常モードにおける前記粉砕手段の回転数に対する回転抑制度合いが、前記第一継続運転モードにおける回転抑制度合いよりも、前記第二継続運転モードにおける回転抑制度合いが大きくなるように構成され、
前記制御手段は、前記第一継続運転モードの後に前記第二継続運転モードを実行することを特徴とする請求項3に記載の便器装置。
【請求項5】
前記第一継続運転モードは、前記継続運転モードの最初に実行される運転モードであって、
前記通常モードにおける前記粉砕手段の回転数から前記第一継続運転モードにおける回転数への低減幅が、前記第一継続運転モードにおける前記粉砕手段の回転数から前記第二継続運転モードにおける回転数への低減幅よりも大きいことを特徴とする請求項4に記載の便器装置。
【請求項6】
前記継続運転モードは、前記第二継続運転モードの後であって、前記継続運転モードの最後に実行される第三継続運転モードを有し、
前記第一継続運転モードにおける前記粉砕手段の回転数から前記第二継続運転モードにおける回転数への低減幅よりも、前記第二継続運転モードにおける前記粉砕手段の回転数から前記第三継続運転モードにおける回転数への低減幅が大きいことを特徴とする請求項5に記載の便器装置。
【請求項7】
前記制御手段が行う報知動作は、使用者に対する警告を発するものであって、
前記制御手段は、前記継続運転モードにおいて、前記貯留槽への異物の混入を検知した後の警告度合いを、前記便器装置の使用回数に応じて高めることを特徴とする請求項1に記載の便器装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−188884(P2012−188884A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−54595(P2011−54595)
【出願日】平成23年3月11日(2011.3.11)
【出願人】(000010087)TOTO株式会社 (3,889)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月11日(2011.3.11)
【出願人】(000010087)TOTO株式会社 (3,889)
【Fターム(参考)】
[ Back to top ]