
分注機構及びこれを用いた自動分析装置

【課題】着脱式のチップを用いる分注機構において分注プロセスが正しく実施されたことを確認可能とする。
【解決手段】ノズル203を有するアーム202と、アーム202を水平移動させる回転中心である軸201とを含み、ノズル203の先端部に着脱式のチップを装着して溶液の吸引操作及び吐出操作をする分注機構において、ノズル203の軌道としてのノズル回転軌道204に対応する位置の少なくとも1か所に検知部(第一検知位置211又は第二検知位置212)を設け、この検知部にノズル203が接近する際に検知される信号を取得し解析して情報を得る信号解析部を設け、チップの装着操作、吸引操作、吐出操作及びチップの廃棄操作のうち少なくともいずれかの操作の前後における情報から操作の妥当性を確認する。
【解決手段】ノズル203を有するアーム202と、アーム202を水平移動させる回転中心である軸201とを含み、ノズル203の先端部に着脱式のチップを装着して溶液の吸引操作及び吐出操作をする分注機構において、ノズル203の軌道としてのノズル回転軌道204に対応する位置の少なくとも1か所に検知部(第一検知位置211又は第二検知位置212)を設け、この検知部にノズル203が接近する際に検知される信号を取得し解析して情報を得る信号解析部を設け、チップの装着操作、吸引操作、吐出操作及びチップの廃棄操作のうち少なくともいずれかの操作の前後における情報から操作の妥当性を確認する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、分注機構及びこれを用いた自動分析装置に関する。
【背景技術】
【0002】
血液や尿などの検体中の特定成分を自動で分析する自動分析装置が一般に知られている。
【0003】
このような自動分析装置においては、検体や試薬などの溶液を所定量反応容器に分注するための分注機構が備えられている。分注機構は、主に、溶液を吸引・吐出するノズル、吸引・吐出の駆動を行うシリンジ、ノズルとシリンジとをつなぐ流路、及びシリンジ駆動の制御手段から構成されている。
【0004】
自動分析装置においては、分注機構により測定対象物質ごとにあらかじめ定められた所定の溶液量を反応容器に順次分注し、反応容器内の反応溶液を吸光法、発光法等の検出手段により測定する。試薬や検体等の溶液が所定の量の通りに正しく分注されていないと、分析結果が正しく得られなくなる可能性がある。このため、検体および試薬等の溶液を所定の量だけ正しく分注することが重要である。試薬・検体等の溶液の量は、微量化が進行しており、現在では数μLレベルの分注が要求されることがある。
【0005】
溶液の分注量が正しく得られなくなる要因として、血清成分等に由来する固形物がノズルの先端に詰まり、シリンジを吸引動作させたときの吸引圧力が溶液に正しく伝達されず、溶液が所定量吸引できないことがあげられる。また、溶液内に存在する泡を吸引する、又は空吸いすることにより、所定量が吸引できなくなる可能性がある。
【0006】
溶液が所定量吸引できたかを確認する手段としては、以下にあげるような技術が知られている。
【0007】
特許文献1には、吸引・吐出用のノズルと駆動用のポンプとの間に圧力センサを設置し、各分注対象溶液に対する圧力変動の正常範囲をあらかじめ記憶させ、正常範囲と実際に分注したときの圧力との差から吸引異常を検出する吸引吐出装置が記載されている。
【0008】
特許文献2には、試薬あるいは検体の分注を行うノズルの先端に、光学式センサの投光部及び受光部を設置し、投光部から発せられた光が溶液の液面あるいは液滴によって反射されたものを受光部で検出することにより、液面の位置あるいは液滴の有無を検知し、これにより分注が正しく行われたかを確認する方法が記載されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開昭62−24151号公報
【特許文献2】特開平10−2904号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
特許文献1に記載されている吸引吐出装置においては、吸引・吐出する対象溶液の量が10μL以下であるような微量の分注の場合にはそもそも圧力の変動が小さいため、正常時と異常時との圧力の差が小さく、所定量を吸引できたことを確認することは困難である。
【0011】
特許文献2に記載されている方法においては、原理的に液滴あるいは液面に光学式センサの投光部及び受光部のうち少なくとも一方が接している必要があるため、これらのうち少なくとも一方はノズルの先端部に設置される必要がある。
【0012】
自動分析装置においては、検体間のコンタミネーションを防止するため、当該コンタミネーションが重大な問題となる免疫分析や遺伝子分析の分野を始めとして、ノズルの先端部に使い捨てのチップを取り付けて分注する方式が広く適用されている。特許文献2に記載されている方法は、使い捨てのチップをノズルの先端部に装着して分注を行う方式の分注機構に適用することが困難である。さらに、光学式センサの投光部及び受光部の少なくとも一方が溶液に接触するため、これらの部分の試薬・検体による汚染により、投光部からの光量あるいは受光部の感度が経時変動し、あらかじめ正常時と異常時とを区別する判定基準を設けていたとしても、所定量の分注ができたかどうかを確認できなくなる可能性がある。
【0013】
本発明は、従前手段に生じるこれらの問題を解決するためになされたものであり、着脱式のチップを用いる分注機構において、所定の量の分注が正しく実施されたことを確認可能とすることを目的とする。
【課題を解決するための手段】
【0014】
本発明は、ノズルを有するアームと、アームを水平方向に移動するアーム移動部とを備え、ノズルの先端部に着脱式のチップを装着して溶液の吸引操作及び吐出操作をする分注機構において、ノズルの軌道に対応する位置の少なくとも1か所に検知部を設け、この検知部にノズル接近する際に検知される信号を取得し解析して情報を得る信号解析部を設け、チップの装着操作、吸引操作、吐出操作及びチップの廃棄操作のうち少なくともいずれかの操作の前後における情報から操作の妥当性を確認することを特徴とする。
【発明の効果】
【0015】
本発明によれば、使い捨てのチップをノズルの先端部に取り付けて分注を行う方式の分注機構において、分注の吸引・吐出等のプロセスが的確に行われたことを確認することが可能となる。
【図面の簡単な説明】
【0016】
【図1】自動分析装置の全体構成図である。
【図2】分注機構の動作経路とセンサ設置位置との関係を示す上面図である。
【図3A】分注機構のアームの初期状態を示す斜視図である。
【図3B】アームにチップを装着した状態を示す斜視図である。
【図3C】アームが第一検知位置の上方を通過する状態を示す斜視図である。
【図3D】アームが検体を吸引する位置に到達した状態を示す斜視図である。
【図3E】アームが第二検知位置の上方を通過する状態を示す斜視図である。
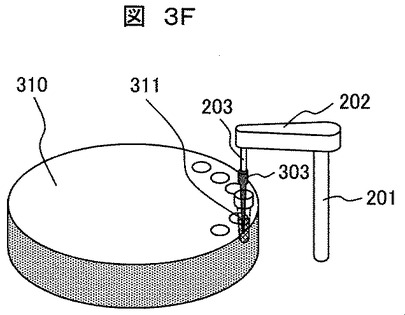
【図3F】検体を吐出する状態を示す斜視図である。
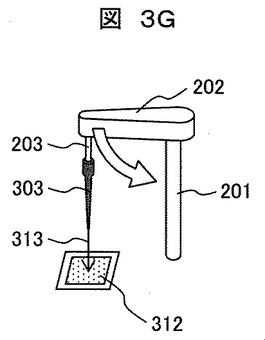
【図3G】アームが再び第二検知位置の上方を通過する状態を示す斜視図である。
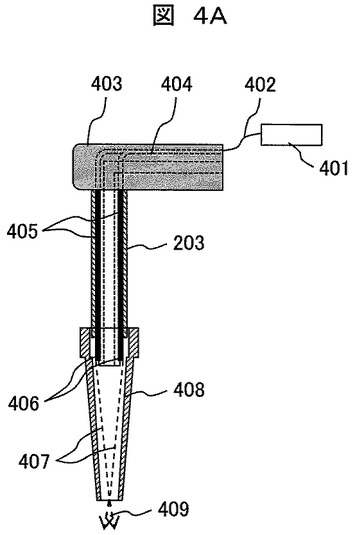
【図4A】アーム及びノズルの光学系を示す部分断面図である。
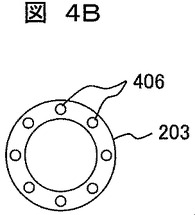
【図4B】図4Aのノズルの光学系を示す下面図である。
【図4C】図4Aのノズルの光学系の変形例を示す下面図である。
【図5A】チップ装着前におけるノズルの光学系を示す部分断面図である。
【図5B】チップ装着後におけるノズル及びチップの光学系を示す部分断面図である。
【図5C】検体吸引後におけるノズル及びチップの光学系を示す部分断面図である。
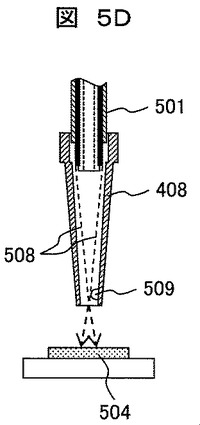
【図5D】検体吐出後におけるノズル及びチップの光学系を示す部分断面図である。
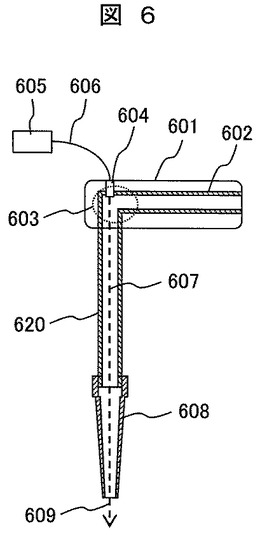
【図6】アーム及びノズルの光学系の変形例を示す断面図である。
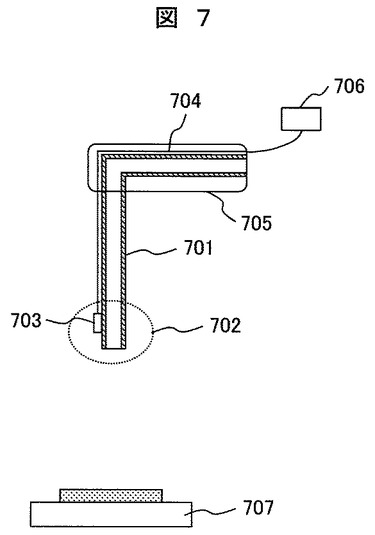
【図7】音波によるセンシングの構成を示す断面図である。
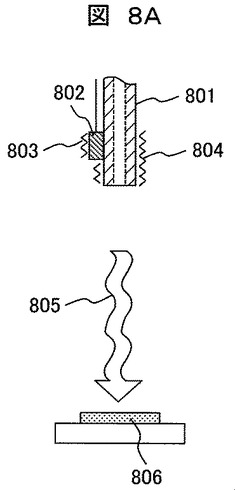
【図8A】チップ装着前における音波によるノズルの振動を示す部分断面図である。
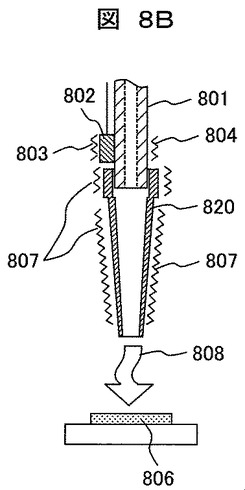
【図8B】チップ装着後における音波によるノズル及びチップの振動を示す部分断面図である。
【図8C】検体吸引後における音波によるノズル及びチップの振動を示す部分断面図である。
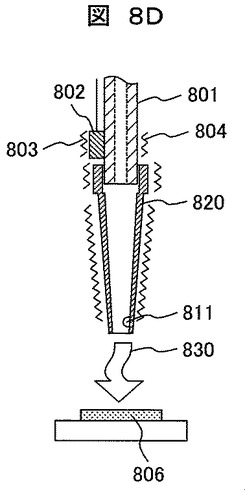
【図8D】検体吐出後における音波によるノズル及びチップの振動を示す部分断面図である。
【図9】音波によるセンシングの変形例を示す断面図である。
【図10A】静電容量方式の実施例を示す構成図である。
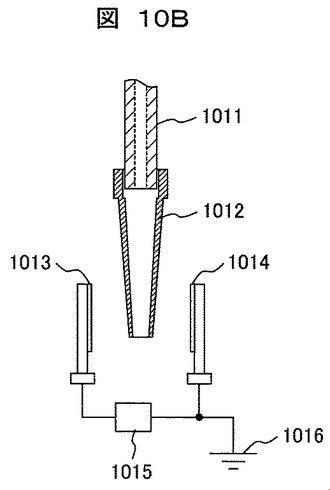
【図10B】静電容量方式の変形例を示す構成図である。
【発明を実施するための形態】
【0017】
本発明は、自動分析装置に関し、特に、試薬や検体等の溶液を反応容器に所定量分注する分注機構に関する。
【0018】
以下、図を用いて説明する。
【0019】
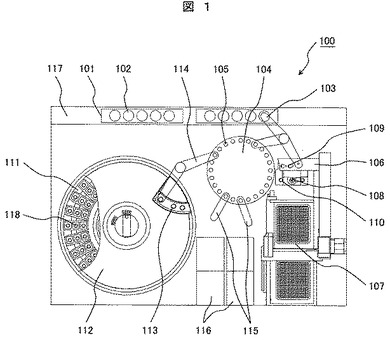
図1は、自動分析装置の全体構成を示したものである。
【0020】
分析装置100は、インキュベータディスク104、試薬ディスク111、検出ユニット116、ラック搬送ライン117等を備えている。
【0021】
ラック搬送ライン117を移動するラック101には、サンプルを保持するサンプル容器102が架設されている。ラック101は、ラック搬送ライン117によってサンプル分注機構103の近傍のサンプル分注位置まで移動する。
【0022】
インキュベータディスク104には、複数の反応容器105が設置可能である。インキュベータディスク104は、円周方向に設置された反応容器105をそれぞれ所定位置まで移動させるための回転運動が可能である。
【0023】
搬送機構106(サンプル分注チップ及び反応容器の搬送機構)は、X軸、Y軸及びZ軸の3方向に移動可能であり、保持部107(サンプル分注チップ及び反応容器の保持部)、反応容器攪拌機構108、廃棄孔109(サンプル分注チップ及び反応容器の廃棄孔)、サンプル分注チップ装着位置110、並びにインキュベータディスク104の所定箇所の範囲を移動し、サンプル分注チップ(保持部107の内部に保持されているが、本図には明示していない。)及び反応容器105の搬送を行う。保持部107には、未使用の反応容器105及びサンプル分注チップが複数設置されている。
【0024】
搬送機構106は、保持部107の上方に移動し、下降して未使用の反応容器105を把持した後、上昇し、さらに、インキュベータディスク104の所定位置上方に移動し、下降して反応容器105を設置する。
【0025】
次いで、搬送機構106は、保持部107の上方に移動し、下降して未使用のサンプル分注チップを把持した後、上昇し、サンプル分注チップ装着位置110の上方に移動し、下降してサンプル分注チップを設置する。
【0026】
サンプル分注機構103は、回動及び上下動が可能であり、ノズルをサンプル分注チップ装着位置110の上方に回動移動した後、下降させ、ノズルの先端部にサンプル分注チップを圧入して装着する(装着操作)。ここで、サンプル分注チップは、液体のサンプルを吸引して保持する容器であり、ノズルの汚染(コンタミネーション)を防止するためにノズルの先端部にサンプルが達しないようにサンプルの吸引量が調節される。
【0027】
サンプル分注チップを装着したノズルは、搬送ラック101に載置されたサンプル容器102の上方に移動させた後、下降させる。そして、サンプル容器102に保持されたサンプルを所定量、サンプル分注チップに吸引する(吸引操作)。サンプルを吸引したサンプル分注チップは、サンプル分注機構103により、インキュベータディスク104の上方に移動させた後、下降させ、インキュベータディスク104に保持された未使用の反応容器105にサンプルを吐出する(吐出操作)。サンプルの吐出が終了すると、サンプル分注機構103は、ノズルを廃棄孔109の上方に移動し、使用済みのサンプル分注チップを廃棄孔109から廃棄する(廃棄操作)。
【0028】
試薬ディスク111には、複数の試薬容器118が設置されている。試薬ディスク111の上部には試薬ディスクカバー112が設けられ、試薬ディスク111内部は所定の温度に保温される。試薬ディスクカバー112の一部には、試薬ディスクカバー開口部113が設けられている。試薬分注機構114は、回転及び上下動が可能であり、ノズルを試薬ディスクカバー112の開口部113の上方に回転移動した後、下降し、ノズルの先端部を所定の試薬容器118内の試薬に浸漬し、所定量の試薬を吸引する。
【0029】
次いで、試薬分注機構114は、ノズルを上昇した後、インキュベータディスク104の所定位置の上方に回転移動し、反応容器105に試薬を吐出する。サンプル及び試薬が吐出された反応容器105は、インキュベータディスク104の回転によって所定位置に搬送され、搬送機構106によって反応容器攪拌機構108に搬送される。
【0030】
反応容器攪拌機構108は、反応容器105に対して回転運動を加えることにより反応容器105内のサンプルと試薬とを攪拌して混和する。攪拌が終了した反応容器105は、搬送機構106によってインキュベータディスク104の所定位置に戻される。
【0031】
液吸引ノズル115は、回転及び上下動が可能である。サンプル及び試薬を分注し、攪拌が終了し、インキュベータディスク104で所定の反応時間が経過した反応容器105の上方に液吸引ノズル115を移動し、下降し、反応容器105内の液を吸引する。液吸引ノズル115で吸引された液は、検出部ユニット116で分析される。液が吸引された反応容器105は、インキュベータディスク104の回転によって所定位置に移動し、搬送機構106によってインキュベータディスク105から廃棄孔109の上方に移動し、廃棄孔109から廃棄する。
【0032】
次に、本発明の主要部分である分注機構を模式的に示した図2を用いて説明する。
【0033】
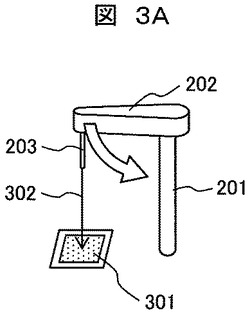
分注機構は、軸201(アーム移動部)に取り付けられたアーム202の先端部にノズル203が設置されている。アーム202は、軸201を中心に回転し、ノズル回転軌道204上に設けられたチップ装着位置205、サンプルラック206上の検体吸引位置207、インキュベータ208上の検体吐出位置209及びチップ廃棄位置210の各点を通過する。センサは、ノズル回転軌道204上の検体吸引位置207と検体吐出位置209との間の第一検知位置211、及び、検体吐出位置209とチップ廃棄位置210との間の第二検知位置212に設置してある。それぞれの検知位置に設置するセンサは、光学方式、音波方式(超音波方式も含む。)及び静電容量方式のいずれかとし、これらの複数を組み合わせたものも可能である。
【0034】
はじめに、分注プロセス及びセンサによる分注の妥当性確認の方法について説明し、その後、個別のセンサ方式による方法について説明する。
【0035】
分注の各プロセスについて図3A〜3Gを用いて説明する。
【0036】
はじめに、アーム202が軸201の周りに回転することにより、ノズル203がホーム位置からチップ装着位置に移動する。この際、図3Aに示す通り、ノズル203が第二検知位置301の上方を通過し、チップが装着されていない状態でノズル203の先端部から出射した光302が第二検知位置301のセンサに到達し、センサ信号を取得する。ノズル203がチップ装着位置に到達した後、図3Bに示す通り、アーム202は、降下してノズル203の先端部にチップ303を装着し、上昇する。
【0037】
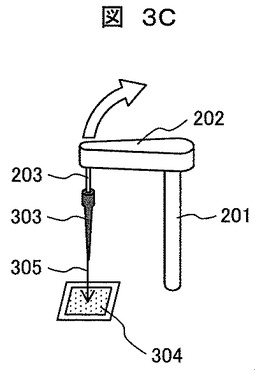
次に、アーム202が回転し、ノズル203が検体吸引位置に向かって移動する。この際、図3Cに示す通り、ノズル203が第一検知位置304の上方を通過し、第一検知位置304においてチップ303が装着された状態で、チップ303の先端部から出射された光305が第一検知位置304のセンサに到達し、センサ信号を取得する。ノズル203は、検体吸引位置の到達した後、図3Dに示す通り、サンプルカップ306内に降下し、検体307を吸引し、再度上昇する。
【0038】
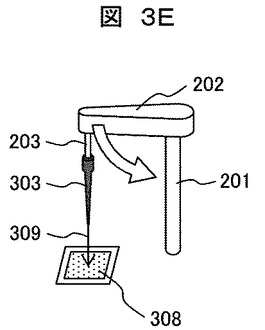
次に、アーム202が回転し、ノズル203が検体吐出場所に向かって移動する。この際、図3Eに示す通り、ノズル203が第二検知位置308の上方を再度通過し、チップ303内に溶液がある状態でチップ303の先端部から出射した光309が検知位置のセンサに到達し、センサ信号を取得する。ノズル203は、検体吐出位置に到達した後、図3Fに示す通り、インキュベータ310に置かれた反応容器311内に検体を吐出し、再度上昇する。
【0039】
次に、アーム202が回転し、ノズル203がチップ廃棄位置に向かって移動する。この際、図3Gに示す通り、ノズル203が再度第二検知位置312の上方を通過し、チップ303内の溶液が吐出された後の状態でチップ303の先端部から出射した光313が第二検知位置312のセンサに到達し、センサ信号を取得する。ノズル203は、チップ廃棄位置に到達したのち、チップ303を廃棄孔に廃棄し、再度上昇する。
【0040】
次に、アーム202がホーム位置に回転移動し、次の分注動作に備えて待機する。
【0041】
上記の一連の動作により、チップ303が装着されていない状態におけるセンサ信号(S1)、チップ303が装着された状態におけるセンサ信号(S2)、チップ303内に溶液が吸引された状態におけるセンサ信号(S3)、及び、チップ303内の溶液が吐出された後の状態におけるセンサ信号(S4)の各信号が得られる。ここで、S1とS2との差から正常にノズルにチップが装着されたかが、S2とS3との差から溶液が正常に吸引されたかが、S3とS4との差から溶液が正常に吐出されたかが、それぞれ判定できる。
【0042】
本発明によれば、それぞれの動作の結果を前後の状態を比較して確認することができるため、従来の動作が行われている時間でのみ確認する方法と比べてより的確にすることができる。
【0043】
以下に、各センサの方式を用いた分注の妥当性の確認方法について記載する。
【0044】
はじめに、光学式センサによる方式について説明する。
【0045】
光学式センサは、投光部および受光部を含む。
【0046】
図4Aは、光学式センサを設置した実施例(光学方式)を示したものである。
【0047】
分析装置の任意の場所にレーザ、発光ダイオード、ランプ等の光源401を設置する。この光源401に光ファイバ402を接続し、この光ファイバ402に接続した光ファイバ404をアーム403の内部に通し、この光ファイバ404に接続した光ファイバ405をノズル外壁に通し)、ノズル203の先端部にこの光ファイバ404に接続した投光部406を設置する。投光部406からノズル203の下方に向けて出射された光407は、ノズル203の先端部に装着されたチップ408の内部を通って、チップ408の先端部から光409となって出射される。
【0048】
ここで、光409の波長は、可視光領域である400〜700nm及び近赤外線領域である700〜2500nmが望ましい。このうち、試料として血液が用いられる場合、赤色領域である625〜740nmが特に望ましい。一方、紫外線領域である400nm未満の波長の光は、装置を構成する樹脂の劣化を促進するおそれがあること、人体に悪影響があり得ること等の観点から好ましくない。
【0049】
受光部には上記の投光部406からの光に対して感受性のあるフォトダイオード等の素子を用い、これを第一検知位置および第二検知位置に設置する。
【0050】
投光部406から発せられる光は、連続光あるいはアーム403が第一検知位置又は第二検知位置を通過するタイミングに同期してパルス的に発せられる光とすることが望ましい。パルス状の光とした場合は、受光部における光検出を発光タイミングと同期させることにより、環境光(周囲の光)の影響を排除してより的確な判定が可能である。
【0051】
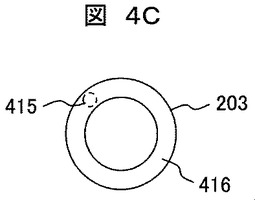
図4B及び4Cは、図4Aのノズル203を下方から見た図である。
【0052】
図4Bにおいては、複数の(8個の)投光部406がノズル203の下面部に露出している。これにより、ノズル203の下面部の周に沿ってノズル203の下方に向かって光を発することができるようにしてある。
【0053】
一方、図4Cにおいては、光ファイバ415の端部がノズル203の下面部に設けられた環状の投光部416に接続されている。投光部416は、光ファイバ415からの光を内部で散乱させて光量を一様にし、ノズル203の下方に出射する構造を有する。
【0054】
次に、上記の各分注プロセスにおけるセンサの信号について、図5A〜5Dを用いて説明する。
【0055】
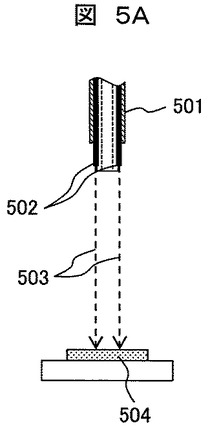
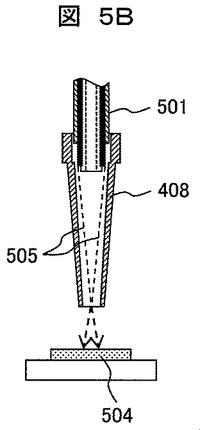
チップが装着されていない状態でノズル501が検知位置(第一検知位置又は第二検知位置)を通過する場合(図5A)は、ノズル501の先端部にある投光部502から発せられた光503が、直接、受光部504に入る。チップ408が装着された状態でノズル501が検知位置を通過する場合(図5B)は、同様に投光部502から発せられた光505がチップ408の内壁で反射・吸収され、チップ408の先端部から受光部504に向けて出射される光量は、チップが装着されていない場合に比べて減少する。
【0056】
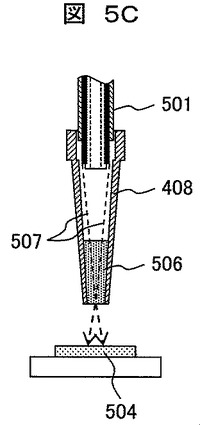
チップ408内に溶液506が吸引された状態でノズル501が検知位置を通過する場合(図5C)は、チップ408の内壁における光量の減衰に加えて、チップ408内の溶液506の液面での反射、溶液506自体による吸光・散乱等の要因により、チップ408から出射されて受光部504に向かう光507は更に減少する。
【0057】
そして、チップ408内の溶液506を反応容器に吐出した後の状態でノズル501が検知位置を通過する場合(図5D)は、溶液要因による光量減少がなくなるため、チップ408の先端部から出射されて受光部504に向かう光508の量は、チップ408を装着した直後の状態における光量に近く、チップ408内に若干量残存する液滴509による分だけ小さくなる。これらのセンサ信号をそれぞれ比較することにより、分注の各プロセスが妥当であったかを確認する。
【0058】
光学式センサから得られる信号量は、使い捨てチップの個体差、チップの装着状態、光源の光量のばらつき、受光素子感度のばらつき、装置振動等に由来する光軸のばらつき、などの要因により分注ごとに必ずしも一定にはならない。
【0059】
本発明の方法を用いれば、ノズルが各プロセスの前後で検出位置を通過し、前後の信号変化から妥当性を確認することができる。このため、上記の光学式センサの信号量が変動する影響を受けずに、的確に分注動作の妥当性確認を行うことができる。
【0060】
図6は、光学式センサを用いる他の実施例である、光源からの光をノズルの内管を通して投光する構成について示したものである。
【0061】
本図においては、アーム601の中に通されている配管602の折れ曲がり部603に投光部604を設置し、この投光部604に光源605から光ファイバ606により光を導く。投光部604から発せられた光607は、ノズル620とノズル620の先端部に装着されたチップ608とを通過して、チップ608の先端部から光609となって出射される。この方式においては、投光部604が配管602内の液体に接触するが、配管602内を通過する液体は純水のみであり、汚染等の問題は回避できる。
【0062】
本構成におけるセンサ信号取得のタイミング及び分注動作の確認方法は、図5A〜5Dに示す実施例の場合と同様である。
【0063】
(音波方式)
次に、音波方式により分注プロセスの確認を行う方法について記載する。
【0064】
図7は、音波方式を適用した分注機構を示したものである。
【0065】
振動素子703は、ノズル701の先端部702に設置してある。振動素子703の配線704は、アーム705の内部を通して振動素子制御部706に接続してある。振動素子703としては、例えばピエゾ素子や水晶振動子等を用いる。センサとしては、マイクロフォン707が検知位置に設置してある。マイクロフォン707で取得された信号は、信号解析部(図示せず)によって解析され、強度及び周波数の情報が得られるようになっている。
【0066】
本構成においても、分注プロセスは上記の光学方式の実施例と同様である。
【0067】
次に、各分注プロセスにおけるセンサの信号について、図8A〜8Dを引用して説明する。
【0068】
チップが装着されていない状態でノズル801が検知位置を通過する場合(図8A)、ノズル801の先端部に設置した振動素子802により発生させた振動803がノズル801に伝わり、ノズル801の振動804が発生し、音波805が発生する。発生した音波805は、マイクロフォン806に到達して信号に変換され、信号解析部によって周波数情報に変換される。ここで、音波805の波長は、非可聴音である20Hz以下又は20kHz以上が望ましい。可聴音の場合、ユーザにとって騒音となり得るからである。
【0069】
チップ820が装着された状態でノズル801が検知位置を通過する場合(図8B)は、振動素子802により発生させた振動803がノズル801およびチップ820に伝導し、ノズル801及びチップ820の振動804、807により音波808が発生する。この音波808は、マイクロフォン806で信号に変換され、信号解析部により周波数情報に変換される。この場合、音波808の周波数は、チップ820が装着された分だけ振動体全体の質量が増加するため、チップ820の装着前に比べて変化する。
【0070】
チップ820内に溶液809が吸引された状態でノズル801が検知位置を通過する場合(図8C)、チップ820に加えて溶液809の分だけ振動体の質量が増加する。これにより、発生する音波810の周波数がチップ820の装着直後の状態から変化する。
【0071】
チップ820内の溶液809を反応容器に吐出した後の状態でノズル801が検知位置を通過する場合(図8D)、溶液809を要因とする音波830の周波数変化が小さくなるため、音波830の周波数は、チップ820を装着した直後の状態における周波数に近く、チップ820内に若干量残存する液滴811を要因とする分だけ変化する。これらの周波数をそれぞれ比較することにより、分注の各プロセスが妥当であったかを確認する。
【0072】
図9は、音波方式の変形例を示したものである。
【0073】
本図においては、音波905を発生させる振動素子903とマイクロフォン904とが対向するように配置されている。これらの間をノズル901に取り付けたチップ902が通過するようになっている。音波905は、マイクロフォン904で信号に変換され、信号解析部により周波数情報に変換される。この構成により、チップ902の有無及びチップ902の内部の溶液の状態を検知することができる。
【0074】
(静電容量方式)
図10Aは、静電容量方式の実施例を示す構成図である。
【0075】
本図においては、ノズル1001と対向電極1003との間に電位差を生じさせて静電容量を検知する。制御回路1004(制御部)は、ノズル1001の電位を調整するとともに、発生する電流等を測定して静電容量を検知する。対向電極1003は、接地極1005に接続してある。
【0076】
この構成により、チップ1002の有無及びチップ1002の内部の溶液の状態を検知することができる。
【0077】
図10Bは、静電容量方式の変形例を示す構成図である。
【0078】
本図においては、電極1013と電極1014との間に電位差を生じさせて静電容量を検知する。ノズル1011は絶縁されている。制御回路1015(制御部)は、電極1013の電位を調整するとともに、発生する電流等を測定して静電容量を検知する。電極1014は、接地極1016に接続してある。
【0079】
この構成により、チップ1012の有無及びチップ1012の内部の溶液の状態を検知することができる。
【0080】
以上の実施例においては、センサを第一検知位置及び第二検知位置の2か所に設置した例を記載したが、分注機構の吐出の性能に関して十分な信頼性が認められる場合は、検体吐出位置とチップ廃棄位置との間に設置したセンサを省略し、チップ内に正しく溶液が吸引されたことのみを確認する形態としてもよい。
【0081】
ここで、静電容量を発生させるために用いる電圧は、直流でも交流でもよい。交流の場合は、チップの有無、チップの内部の溶液の有無等による誘電率の違いに伴う電流の位相の変化を検出することにより、静電容量を算出することができる。
【0082】
以上の実施例においては、アームが軸を中心に回転する水平移動の場合について説明したが、本発明は、アームがX軸及びY軸の2軸により水平移動する場合でも、その軌道上にセンサを設置することで実施可能である。
【符号の説明】
【0083】
100:分析装置、101:ラック、102:サンプル容器、103:サンプル分注機構、104:インキュベータディスク、105:反応容器、106:搬送機構、107:保持部、108:反応容器攪拌機構、109:廃棄孔、110:サンプル分注チップ装着位置、111:試薬ディスク、112:試薬ディスクカバー、113:試薬ディスクカバー開口部、114:試薬分注機構、115:液吸引ノズル、116:検出ユニット、117:ラック搬送ライン、118:試薬容器、201:軸、202:アーム、203:ノズル、204:ノズル回転軌道、205:チップ装着位置、206:サンプルラック、207:検体吸引位置、208:インキュベータ、209:検体吐出位置、210:チップ廃棄位置、211:第一検知位置、212:第二検知位置、301:第二検知位置、302:光、303:チップ、304:第一検知位置、305:光、306:サンプルカップ、307:検体、308:第二検知位置、309:光、310:インキュベータ、311:反応容器、312:第二検知位置、313:光、401:光源、402、404、405、415:光ファイバ、403:アーム、406、416:投光部、407、409:光、408:チップ、501:ノズル、502:投光部、503、505、507、508:光、504:受光部、506:溶液、509:液滴、601:アーム、602:配管、603:折れ曲がり部、604:投光部、605:光源、606:光ファイバ、607、609:光、608:チップ、620:ノズル、701:ノズル、702:先端部、703:振動素子、704:配線、705:アーム、706:振動素子制御部、707:マイクロフォン、801:ノズル、802:振動素子、803、804、807:振動、805、808、810、830:音波、806:マイクロフォン、809:溶液、811:液滴、820:チップ、901:ノズル、902:チップ、903:振動素子、904:マイクロフォン、905:音波、1001:ノズル、1002:チップ、1003:対向電極、1004:制御回路、1005:接地極、1011:ノズル、1012:チップ、1013:電極、1014:電極、1015:制御回路、1016:接地極。
【技術分野】
【0001】
本発明は、分注機構及びこれを用いた自動分析装置に関する。
【背景技術】
【0002】
血液や尿などの検体中の特定成分を自動で分析する自動分析装置が一般に知られている。
【0003】
このような自動分析装置においては、検体や試薬などの溶液を所定量反応容器に分注するための分注機構が備えられている。分注機構は、主に、溶液を吸引・吐出するノズル、吸引・吐出の駆動を行うシリンジ、ノズルとシリンジとをつなぐ流路、及びシリンジ駆動の制御手段から構成されている。
【0004】
自動分析装置においては、分注機構により測定対象物質ごとにあらかじめ定められた所定の溶液量を反応容器に順次分注し、反応容器内の反応溶液を吸光法、発光法等の検出手段により測定する。試薬や検体等の溶液が所定の量の通りに正しく分注されていないと、分析結果が正しく得られなくなる可能性がある。このため、検体および試薬等の溶液を所定の量だけ正しく分注することが重要である。試薬・検体等の溶液の量は、微量化が進行しており、現在では数μLレベルの分注が要求されることがある。
【0005】
溶液の分注量が正しく得られなくなる要因として、血清成分等に由来する固形物がノズルの先端に詰まり、シリンジを吸引動作させたときの吸引圧力が溶液に正しく伝達されず、溶液が所定量吸引できないことがあげられる。また、溶液内に存在する泡を吸引する、又は空吸いすることにより、所定量が吸引できなくなる可能性がある。
【0006】
溶液が所定量吸引できたかを確認する手段としては、以下にあげるような技術が知られている。
【0007】
特許文献1には、吸引・吐出用のノズルと駆動用のポンプとの間に圧力センサを設置し、各分注対象溶液に対する圧力変動の正常範囲をあらかじめ記憶させ、正常範囲と実際に分注したときの圧力との差から吸引異常を検出する吸引吐出装置が記載されている。
【0008】
特許文献2には、試薬あるいは検体の分注を行うノズルの先端に、光学式センサの投光部及び受光部を設置し、投光部から発せられた光が溶液の液面あるいは液滴によって反射されたものを受光部で検出することにより、液面の位置あるいは液滴の有無を検知し、これにより分注が正しく行われたかを確認する方法が記載されている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開昭62−24151号公報
【特許文献2】特開平10−2904号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
特許文献1に記載されている吸引吐出装置においては、吸引・吐出する対象溶液の量が10μL以下であるような微量の分注の場合にはそもそも圧力の変動が小さいため、正常時と異常時との圧力の差が小さく、所定量を吸引できたことを確認することは困難である。
【0011】
特許文献2に記載されている方法においては、原理的に液滴あるいは液面に光学式センサの投光部及び受光部のうち少なくとも一方が接している必要があるため、これらのうち少なくとも一方はノズルの先端部に設置される必要がある。
【0012】
自動分析装置においては、検体間のコンタミネーションを防止するため、当該コンタミネーションが重大な問題となる免疫分析や遺伝子分析の分野を始めとして、ノズルの先端部に使い捨てのチップを取り付けて分注する方式が広く適用されている。特許文献2に記載されている方法は、使い捨てのチップをノズルの先端部に装着して分注を行う方式の分注機構に適用することが困難である。さらに、光学式センサの投光部及び受光部の少なくとも一方が溶液に接触するため、これらの部分の試薬・検体による汚染により、投光部からの光量あるいは受光部の感度が経時変動し、あらかじめ正常時と異常時とを区別する判定基準を設けていたとしても、所定量の分注ができたかどうかを確認できなくなる可能性がある。
【0013】
本発明は、従前手段に生じるこれらの問題を解決するためになされたものであり、着脱式のチップを用いる分注機構において、所定の量の分注が正しく実施されたことを確認可能とすることを目的とする。
【課題を解決するための手段】
【0014】
本発明は、ノズルを有するアームと、アームを水平方向に移動するアーム移動部とを備え、ノズルの先端部に着脱式のチップを装着して溶液の吸引操作及び吐出操作をする分注機構において、ノズルの軌道に対応する位置の少なくとも1か所に検知部を設け、この検知部にノズル接近する際に検知される信号を取得し解析して情報を得る信号解析部を設け、チップの装着操作、吸引操作、吐出操作及びチップの廃棄操作のうち少なくともいずれかの操作の前後における情報から操作の妥当性を確認することを特徴とする。
【発明の効果】
【0015】
本発明によれば、使い捨てのチップをノズルの先端部に取り付けて分注を行う方式の分注機構において、分注の吸引・吐出等のプロセスが的確に行われたことを確認することが可能となる。
【図面の簡単な説明】
【0016】
【図1】自動分析装置の全体構成図である。
【図2】分注機構の動作経路とセンサ設置位置との関係を示す上面図である。
【図3A】分注機構のアームの初期状態を示す斜視図である。
【図3B】アームにチップを装着した状態を示す斜視図である。
【図3C】アームが第一検知位置の上方を通過する状態を示す斜視図である。
【図3D】アームが検体を吸引する位置に到達した状態を示す斜視図である。
【図3E】アームが第二検知位置の上方を通過する状態を示す斜視図である。
【図3F】検体を吐出する状態を示す斜視図である。
【図3G】アームが再び第二検知位置の上方を通過する状態を示す斜視図である。
【図4A】アーム及びノズルの光学系を示す部分断面図である。
【図4B】図4Aのノズルの光学系を示す下面図である。
【図4C】図4Aのノズルの光学系の変形例を示す下面図である。
【図5A】チップ装着前におけるノズルの光学系を示す部分断面図である。
【図5B】チップ装着後におけるノズル及びチップの光学系を示す部分断面図である。
【図5C】検体吸引後におけるノズル及びチップの光学系を示す部分断面図である。
【図5D】検体吐出後におけるノズル及びチップの光学系を示す部分断面図である。
【図6】アーム及びノズルの光学系の変形例を示す断面図である。
【図7】音波によるセンシングの構成を示す断面図である。
【図8A】チップ装着前における音波によるノズルの振動を示す部分断面図である。
【図8B】チップ装着後における音波によるノズル及びチップの振動を示す部分断面図である。
【図8C】検体吸引後における音波によるノズル及びチップの振動を示す部分断面図である。
【図8D】検体吐出後における音波によるノズル及びチップの振動を示す部分断面図である。
【図9】音波によるセンシングの変形例を示す断面図である。
【図10A】静電容量方式の実施例を示す構成図である。
【図10B】静電容量方式の変形例を示す構成図である。
【発明を実施するための形態】
【0017】
本発明は、自動分析装置に関し、特に、試薬や検体等の溶液を反応容器に所定量分注する分注機構に関する。
【0018】
以下、図を用いて説明する。
【0019】
図1は、自動分析装置の全体構成を示したものである。
【0020】
分析装置100は、インキュベータディスク104、試薬ディスク111、検出ユニット116、ラック搬送ライン117等を備えている。
【0021】
ラック搬送ライン117を移動するラック101には、サンプルを保持するサンプル容器102が架設されている。ラック101は、ラック搬送ライン117によってサンプル分注機構103の近傍のサンプル分注位置まで移動する。
【0022】
インキュベータディスク104には、複数の反応容器105が設置可能である。インキュベータディスク104は、円周方向に設置された反応容器105をそれぞれ所定位置まで移動させるための回転運動が可能である。
【0023】
搬送機構106(サンプル分注チップ及び反応容器の搬送機構)は、X軸、Y軸及びZ軸の3方向に移動可能であり、保持部107(サンプル分注チップ及び反応容器の保持部)、反応容器攪拌機構108、廃棄孔109(サンプル分注チップ及び反応容器の廃棄孔)、サンプル分注チップ装着位置110、並びにインキュベータディスク104の所定箇所の範囲を移動し、サンプル分注チップ(保持部107の内部に保持されているが、本図には明示していない。)及び反応容器105の搬送を行う。保持部107には、未使用の反応容器105及びサンプル分注チップが複数設置されている。
【0024】
搬送機構106は、保持部107の上方に移動し、下降して未使用の反応容器105を把持した後、上昇し、さらに、インキュベータディスク104の所定位置上方に移動し、下降して反応容器105を設置する。
【0025】
次いで、搬送機構106は、保持部107の上方に移動し、下降して未使用のサンプル分注チップを把持した後、上昇し、サンプル分注チップ装着位置110の上方に移動し、下降してサンプル分注チップを設置する。
【0026】
サンプル分注機構103は、回動及び上下動が可能であり、ノズルをサンプル分注チップ装着位置110の上方に回動移動した後、下降させ、ノズルの先端部にサンプル分注チップを圧入して装着する(装着操作)。ここで、サンプル分注チップは、液体のサンプルを吸引して保持する容器であり、ノズルの汚染(コンタミネーション)を防止するためにノズルの先端部にサンプルが達しないようにサンプルの吸引量が調節される。
【0027】
サンプル分注チップを装着したノズルは、搬送ラック101に載置されたサンプル容器102の上方に移動させた後、下降させる。そして、サンプル容器102に保持されたサンプルを所定量、サンプル分注チップに吸引する(吸引操作)。サンプルを吸引したサンプル分注チップは、サンプル分注機構103により、インキュベータディスク104の上方に移動させた後、下降させ、インキュベータディスク104に保持された未使用の反応容器105にサンプルを吐出する(吐出操作)。サンプルの吐出が終了すると、サンプル分注機構103は、ノズルを廃棄孔109の上方に移動し、使用済みのサンプル分注チップを廃棄孔109から廃棄する(廃棄操作)。
【0028】
試薬ディスク111には、複数の試薬容器118が設置されている。試薬ディスク111の上部には試薬ディスクカバー112が設けられ、試薬ディスク111内部は所定の温度に保温される。試薬ディスクカバー112の一部には、試薬ディスクカバー開口部113が設けられている。試薬分注機構114は、回転及び上下動が可能であり、ノズルを試薬ディスクカバー112の開口部113の上方に回転移動した後、下降し、ノズルの先端部を所定の試薬容器118内の試薬に浸漬し、所定量の試薬を吸引する。
【0029】
次いで、試薬分注機構114は、ノズルを上昇した後、インキュベータディスク104の所定位置の上方に回転移動し、反応容器105に試薬を吐出する。サンプル及び試薬が吐出された反応容器105は、インキュベータディスク104の回転によって所定位置に搬送され、搬送機構106によって反応容器攪拌機構108に搬送される。
【0030】
反応容器攪拌機構108は、反応容器105に対して回転運動を加えることにより反応容器105内のサンプルと試薬とを攪拌して混和する。攪拌が終了した反応容器105は、搬送機構106によってインキュベータディスク104の所定位置に戻される。
【0031】
液吸引ノズル115は、回転及び上下動が可能である。サンプル及び試薬を分注し、攪拌が終了し、インキュベータディスク104で所定の反応時間が経過した反応容器105の上方に液吸引ノズル115を移動し、下降し、反応容器105内の液を吸引する。液吸引ノズル115で吸引された液は、検出部ユニット116で分析される。液が吸引された反応容器105は、インキュベータディスク104の回転によって所定位置に移動し、搬送機構106によってインキュベータディスク105から廃棄孔109の上方に移動し、廃棄孔109から廃棄する。
【0032】
次に、本発明の主要部分である分注機構を模式的に示した図2を用いて説明する。
【0033】
分注機構は、軸201(アーム移動部)に取り付けられたアーム202の先端部にノズル203が設置されている。アーム202は、軸201を中心に回転し、ノズル回転軌道204上に設けられたチップ装着位置205、サンプルラック206上の検体吸引位置207、インキュベータ208上の検体吐出位置209及びチップ廃棄位置210の各点を通過する。センサは、ノズル回転軌道204上の検体吸引位置207と検体吐出位置209との間の第一検知位置211、及び、検体吐出位置209とチップ廃棄位置210との間の第二検知位置212に設置してある。それぞれの検知位置に設置するセンサは、光学方式、音波方式(超音波方式も含む。)及び静電容量方式のいずれかとし、これらの複数を組み合わせたものも可能である。
【0034】
はじめに、分注プロセス及びセンサによる分注の妥当性確認の方法について説明し、その後、個別のセンサ方式による方法について説明する。
【0035】
分注の各プロセスについて図3A〜3Gを用いて説明する。
【0036】
はじめに、アーム202が軸201の周りに回転することにより、ノズル203がホーム位置からチップ装着位置に移動する。この際、図3Aに示す通り、ノズル203が第二検知位置301の上方を通過し、チップが装着されていない状態でノズル203の先端部から出射した光302が第二検知位置301のセンサに到達し、センサ信号を取得する。ノズル203がチップ装着位置に到達した後、図3Bに示す通り、アーム202は、降下してノズル203の先端部にチップ303を装着し、上昇する。
【0037】
次に、アーム202が回転し、ノズル203が検体吸引位置に向かって移動する。この際、図3Cに示す通り、ノズル203が第一検知位置304の上方を通過し、第一検知位置304においてチップ303が装着された状態で、チップ303の先端部から出射された光305が第一検知位置304のセンサに到達し、センサ信号を取得する。ノズル203は、検体吸引位置の到達した後、図3Dに示す通り、サンプルカップ306内に降下し、検体307を吸引し、再度上昇する。
【0038】
次に、アーム202が回転し、ノズル203が検体吐出場所に向かって移動する。この際、図3Eに示す通り、ノズル203が第二検知位置308の上方を再度通過し、チップ303内に溶液がある状態でチップ303の先端部から出射した光309が検知位置のセンサに到達し、センサ信号を取得する。ノズル203は、検体吐出位置に到達した後、図3Fに示す通り、インキュベータ310に置かれた反応容器311内に検体を吐出し、再度上昇する。
【0039】
次に、アーム202が回転し、ノズル203がチップ廃棄位置に向かって移動する。この際、図3Gに示す通り、ノズル203が再度第二検知位置312の上方を通過し、チップ303内の溶液が吐出された後の状態でチップ303の先端部から出射した光313が第二検知位置312のセンサに到達し、センサ信号を取得する。ノズル203は、チップ廃棄位置に到達したのち、チップ303を廃棄孔に廃棄し、再度上昇する。
【0040】
次に、アーム202がホーム位置に回転移動し、次の分注動作に備えて待機する。
【0041】
上記の一連の動作により、チップ303が装着されていない状態におけるセンサ信号(S1)、チップ303が装着された状態におけるセンサ信号(S2)、チップ303内に溶液が吸引された状態におけるセンサ信号(S3)、及び、チップ303内の溶液が吐出された後の状態におけるセンサ信号(S4)の各信号が得られる。ここで、S1とS2との差から正常にノズルにチップが装着されたかが、S2とS3との差から溶液が正常に吸引されたかが、S3とS4との差から溶液が正常に吐出されたかが、それぞれ判定できる。
【0042】
本発明によれば、それぞれの動作の結果を前後の状態を比較して確認することができるため、従来の動作が行われている時間でのみ確認する方法と比べてより的確にすることができる。
【0043】
以下に、各センサの方式を用いた分注の妥当性の確認方法について記載する。
【0044】
はじめに、光学式センサによる方式について説明する。
【0045】
光学式センサは、投光部および受光部を含む。
【0046】
図4Aは、光学式センサを設置した実施例(光学方式)を示したものである。
【0047】
分析装置の任意の場所にレーザ、発光ダイオード、ランプ等の光源401を設置する。この光源401に光ファイバ402を接続し、この光ファイバ402に接続した光ファイバ404をアーム403の内部に通し、この光ファイバ404に接続した光ファイバ405をノズル外壁に通し)、ノズル203の先端部にこの光ファイバ404に接続した投光部406を設置する。投光部406からノズル203の下方に向けて出射された光407は、ノズル203の先端部に装着されたチップ408の内部を通って、チップ408の先端部から光409となって出射される。
【0048】
ここで、光409の波長は、可視光領域である400〜700nm及び近赤外線領域である700〜2500nmが望ましい。このうち、試料として血液が用いられる場合、赤色領域である625〜740nmが特に望ましい。一方、紫外線領域である400nm未満の波長の光は、装置を構成する樹脂の劣化を促進するおそれがあること、人体に悪影響があり得ること等の観点から好ましくない。
【0049】
受光部には上記の投光部406からの光に対して感受性のあるフォトダイオード等の素子を用い、これを第一検知位置および第二検知位置に設置する。
【0050】
投光部406から発せられる光は、連続光あるいはアーム403が第一検知位置又は第二検知位置を通過するタイミングに同期してパルス的に発せられる光とすることが望ましい。パルス状の光とした場合は、受光部における光検出を発光タイミングと同期させることにより、環境光(周囲の光)の影響を排除してより的確な判定が可能である。
【0051】
図4B及び4Cは、図4Aのノズル203を下方から見た図である。
【0052】
図4Bにおいては、複数の(8個の)投光部406がノズル203の下面部に露出している。これにより、ノズル203の下面部の周に沿ってノズル203の下方に向かって光を発することができるようにしてある。
【0053】
一方、図4Cにおいては、光ファイバ415の端部がノズル203の下面部に設けられた環状の投光部416に接続されている。投光部416は、光ファイバ415からの光を内部で散乱させて光量を一様にし、ノズル203の下方に出射する構造を有する。
【0054】
次に、上記の各分注プロセスにおけるセンサの信号について、図5A〜5Dを用いて説明する。
【0055】
チップが装着されていない状態でノズル501が検知位置(第一検知位置又は第二検知位置)を通過する場合(図5A)は、ノズル501の先端部にある投光部502から発せられた光503が、直接、受光部504に入る。チップ408が装着された状態でノズル501が検知位置を通過する場合(図5B)は、同様に投光部502から発せられた光505がチップ408の内壁で反射・吸収され、チップ408の先端部から受光部504に向けて出射される光量は、チップが装着されていない場合に比べて減少する。
【0056】
チップ408内に溶液506が吸引された状態でノズル501が検知位置を通過する場合(図5C)は、チップ408の内壁における光量の減衰に加えて、チップ408内の溶液506の液面での反射、溶液506自体による吸光・散乱等の要因により、チップ408から出射されて受光部504に向かう光507は更に減少する。
【0057】
そして、チップ408内の溶液506を反応容器に吐出した後の状態でノズル501が検知位置を通過する場合(図5D)は、溶液要因による光量減少がなくなるため、チップ408の先端部から出射されて受光部504に向かう光508の量は、チップ408を装着した直後の状態における光量に近く、チップ408内に若干量残存する液滴509による分だけ小さくなる。これらのセンサ信号をそれぞれ比較することにより、分注の各プロセスが妥当であったかを確認する。
【0058】
光学式センサから得られる信号量は、使い捨てチップの個体差、チップの装着状態、光源の光量のばらつき、受光素子感度のばらつき、装置振動等に由来する光軸のばらつき、などの要因により分注ごとに必ずしも一定にはならない。
【0059】
本発明の方法を用いれば、ノズルが各プロセスの前後で検出位置を通過し、前後の信号変化から妥当性を確認することができる。このため、上記の光学式センサの信号量が変動する影響を受けずに、的確に分注動作の妥当性確認を行うことができる。
【0060】
図6は、光学式センサを用いる他の実施例である、光源からの光をノズルの内管を通して投光する構成について示したものである。
【0061】
本図においては、アーム601の中に通されている配管602の折れ曲がり部603に投光部604を設置し、この投光部604に光源605から光ファイバ606により光を導く。投光部604から発せられた光607は、ノズル620とノズル620の先端部に装着されたチップ608とを通過して、チップ608の先端部から光609となって出射される。この方式においては、投光部604が配管602内の液体に接触するが、配管602内を通過する液体は純水のみであり、汚染等の問題は回避できる。
【0062】
本構成におけるセンサ信号取得のタイミング及び分注動作の確認方法は、図5A〜5Dに示す実施例の場合と同様である。
【0063】
(音波方式)
次に、音波方式により分注プロセスの確認を行う方法について記載する。
【0064】
図7は、音波方式を適用した分注機構を示したものである。
【0065】
振動素子703は、ノズル701の先端部702に設置してある。振動素子703の配線704は、アーム705の内部を通して振動素子制御部706に接続してある。振動素子703としては、例えばピエゾ素子や水晶振動子等を用いる。センサとしては、マイクロフォン707が検知位置に設置してある。マイクロフォン707で取得された信号は、信号解析部(図示せず)によって解析され、強度及び周波数の情報が得られるようになっている。
【0066】
本構成においても、分注プロセスは上記の光学方式の実施例と同様である。
【0067】
次に、各分注プロセスにおけるセンサの信号について、図8A〜8Dを引用して説明する。
【0068】
チップが装着されていない状態でノズル801が検知位置を通過する場合(図8A)、ノズル801の先端部に設置した振動素子802により発生させた振動803がノズル801に伝わり、ノズル801の振動804が発生し、音波805が発生する。発生した音波805は、マイクロフォン806に到達して信号に変換され、信号解析部によって周波数情報に変換される。ここで、音波805の波長は、非可聴音である20Hz以下又は20kHz以上が望ましい。可聴音の場合、ユーザにとって騒音となり得るからである。
【0069】
チップ820が装着された状態でノズル801が検知位置を通過する場合(図8B)は、振動素子802により発生させた振動803がノズル801およびチップ820に伝導し、ノズル801及びチップ820の振動804、807により音波808が発生する。この音波808は、マイクロフォン806で信号に変換され、信号解析部により周波数情報に変換される。この場合、音波808の周波数は、チップ820が装着された分だけ振動体全体の質量が増加するため、チップ820の装着前に比べて変化する。
【0070】
チップ820内に溶液809が吸引された状態でノズル801が検知位置を通過する場合(図8C)、チップ820に加えて溶液809の分だけ振動体の質量が増加する。これにより、発生する音波810の周波数がチップ820の装着直後の状態から変化する。
【0071】
チップ820内の溶液809を反応容器に吐出した後の状態でノズル801が検知位置を通過する場合(図8D)、溶液809を要因とする音波830の周波数変化が小さくなるため、音波830の周波数は、チップ820を装着した直後の状態における周波数に近く、チップ820内に若干量残存する液滴811を要因とする分だけ変化する。これらの周波数をそれぞれ比較することにより、分注の各プロセスが妥当であったかを確認する。
【0072】
図9は、音波方式の変形例を示したものである。
【0073】
本図においては、音波905を発生させる振動素子903とマイクロフォン904とが対向するように配置されている。これらの間をノズル901に取り付けたチップ902が通過するようになっている。音波905は、マイクロフォン904で信号に変換され、信号解析部により周波数情報に変換される。この構成により、チップ902の有無及びチップ902の内部の溶液の状態を検知することができる。
【0074】
(静電容量方式)
図10Aは、静電容量方式の実施例を示す構成図である。
【0075】
本図においては、ノズル1001と対向電極1003との間に電位差を生じさせて静電容量を検知する。制御回路1004(制御部)は、ノズル1001の電位を調整するとともに、発生する電流等を測定して静電容量を検知する。対向電極1003は、接地極1005に接続してある。
【0076】
この構成により、チップ1002の有無及びチップ1002の内部の溶液の状態を検知することができる。
【0077】
図10Bは、静電容量方式の変形例を示す構成図である。
【0078】
本図においては、電極1013と電極1014との間に電位差を生じさせて静電容量を検知する。ノズル1011は絶縁されている。制御回路1015(制御部)は、電極1013の電位を調整するとともに、発生する電流等を測定して静電容量を検知する。電極1014は、接地極1016に接続してある。
【0079】
この構成により、チップ1012の有無及びチップ1012の内部の溶液の状態を検知することができる。
【0080】
以上の実施例においては、センサを第一検知位置及び第二検知位置の2か所に設置した例を記載したが、分注機構の吐出の性能に関して十分な信頼性が認められる場合は、検体吐出位置とチップ廃棄位置との間に設置したセンサを省略し、チップ内に正しく溶液が吸引されたことのみを確認する形態としてもよい。
【0081】
ここで、静電容量を発生させるために用いる電圧は、直流でも交流でもよい。交流の場合は、チップの有無、チップの内部の溶液の有無等による誘電率の違いに伴う電流の位相の変化を検出することにより、静電容量を算出することができる。
【0082】
以上の実施例においては、アームが軸を中心に回転する水平移動の場合について説明したが、本発明は、アームがX軸及びY軸の2軸により水平移動する場合でも、その軌道上にセンサを設置することで実施可能である。
【符号の説明】
【0083】
100:分析装置、101:ラック、102:サンプル容器、103:サンプル分注機構、104:インキュベータディスク、105:反応容器、106:搬送機構、107:保持部、108:反応容器攪拌機構、109:廃棄孔、110:サンプル分注チップ装着位置、111:試薬ディスク、112:試薬ディスクカバー、113:試薬ディスクカバー開口部、114:試薬分注機構、115:液吸引ノズル、116:検出ユニット、117:ラック搬送ライン、118:試薬容器、201:軸、202:アーム、203:ノズル、204:ノズル回転軌道、205:チップ装着位置、206:サンプルラック、207:検体吸引位置、208:インキュベータ、209:検体吐出位置、210:チップ廃棄位置、211:第一検知位置、212:第二検知位置、301:第二検知位置、302:光、303:チップ、304:第一検知位置、305:光、306:サンプルカップ、307:検体、308:第二検知位置、309:光、310:インキュベータ、311:反応容器、312:第二検知位置、313:光、401:光源、402、404、405、415:光ファイバ、403:アーム、406、416:投光部、407、409:光、408:チップ、501:ノズル、502:投光部、503、505、507、508:光、504:受光部、506:溶液、509:液滴、601:アーム、602:配管、603:折れ曲がり部、604:投光部、605:光源、606:光ファイバ、607、609:光、608:チップ、620:ノズル、701:ノズル、702:先端部、703:振動素子、704:配線、705:アーム、706:振動素子制御部、707:マイクロフォン、801:ノズル、802:振動素子、803、804、807:振動、805、808、810、830:音波、806:マイクロフォン、809:溶液、811:液滴、820:チップ、901:ノズル、902:チップ、903:振動素子、904:マイクロフォン、905:音波、1001:ノズル、1002:チップ、1003:対向電極、1004:制御回路、1005:接地極、1011:ノズル、1012:チップ、1013:電極、1014:電極、1015:制御回路、1016:接地極。
【特許請求の範囲】
【請求項1】
ノズルを有するアームと、このアームを水平方向に移動するアーム移動部とを備え、前記ノズルの先端部に着脱式のチップを装着して溶液の吸引操作及び吐出操作をする分注機構であって、前記ノズルの軌道に対応する位置の少なくとも1か所に検知部を設け、この検知部に前記ノズルが接近する際に検知される信号を取得し解析して情報を得る信号解析部を有し、前記チップの装着操作、前記吸引操作、前記吐出操作及び前記チップの廃棄操作のうち少なくともいずれかの操作の前後における前記情報から前記操作の妥当性を確認可能としたことを特徴とする分注機構。
【請求項2】
前記情報の差分から前記操作の妥当性を確認可能としたことを特徴とする請求項1記載の分注機構。
【請求項3】
前記妥当性は、前記チップの有無、前記チップに吸引された溶液の有無又は量から確認することを特徴とする請求項1又は2に記載の分注機構。
【請求項4】
前記検知部は、少なくとも受光部を備えた光学式センサであることを特徴とする請求項1〜3のいずれか一項に記載の分注機構。
【請求項5】
前記検知部は、少なくともマイクロフォンを備えた音波式センサであることを特徴とする請求項1〜3のいずれか一項に記載の分注機構。
【請求項6】
前記検知部は、静電容量を検知するものであることを特徴とする請求項1〜3のいずれか一項に記載の分注機構。
【請求項7】
請求項1〜6のいずれか一項に記載の分注機構を備えたことを特徴とする自動分析装置。
【請求項1】
ノズルを有するアームと、このアームを水平方向に移動するアーム移動部とを備え、前記ノズルの先端部に着脱式のチップを装着して溶液の吸引操作及び吐出操作をする分注機構であって、前記ノズルの軌道に対応する位置の少なくとも1か所に検知部を設け、この検知部に前記ノズルが接近する際に検知される信号を取得し解析して情報を得る信号解析部を有し、前記チップの装着操作、前記吸引操作、前記吐出操作及び前記チップの廃棄操作のうち少なくともいずれかの操作の前後における前記情報から前記操作の妥当性を確認可能としたことを特徴とする分注機構。
【請求項2】
前記情報の差分から前記操作の妥当性を確認可能としたことを特徴とする請求項1記載の分注機構。
【請求項3】
前記妥当性は、前記チップの有無、前記チップに吸引された溶液の有無又は量から確認することを特徴とする請求項1又は2に記載の分注機構。
【請求項4】
前記検知部は、少なくとも受光部を備えた光学式センサであることを特徴とする請求項1〜3のいずれか一項に記載の分注機構。
【請求項5】
前記検知部は、少なくともマイクロフォンを備えた音波式センサであることを特徴とする請求項1〜3のいずれか一項に記載の分注機構。
【請求項6】
前記検知部は、静電容量を検知するものであることを特徴とする請求項1〜3のいずれか一項に記載の分注機構。
【請求項7】
請求項1〜6のいずれか一項に記載の分注機構を備えたことを特徴とする自動分析装置。
【図1】


【図2】

【図3A】
【図3B】

【図3C】
【図3D】

【図3E】
【図3F】
【図3G】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【図5C】
【図5D】
【図6】
【図7】
【図8A】
【図8B】
【図8C】

【図8D】
【図9】

【図10A】

【図10B】
【図2】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図3F】
【図3G】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【図5C】
【図5D】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【図8D】
【図9】
【図10A】
【図10B】
【公開番号】特開2013−44692(P2013−44692A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−184343(P2011−184343)
【出願日】平成23年8月26日(2011.8.26)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月26日(2011.8.26)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]