
医療潅流システム
【課題】種々の医療処置に関連して血液の選択的酸素化、濾過、および再循環に対応できるようにした医療潅流システムを実現する。
【解決手段】患者の治療に関連して使用する医療潅流システム(10)は、患者に連結された流体導管を介して血液を圧送するようにした血液ポンプ(50c)の形態の第1のタイプの潅流装置と、状態を感知してこの状態に関連する感知信号を発生するようにした感知装置(50a、50b、50d、50e)の形態の第2のタイプの潅流装置とを備えている。この潅流システムは、更に、電力ラインを有する電力ネットワークと、潅流装置を電力ネットワークに選択的に接続する手段と、オペレータからの制御コマンドを受信する入力装置(116)付きコントローラ(20)とを有する。
【解決手段】患者の治療に関連して使用する医療潅流システム(10)は、患者に連結された流体導管を介して血液を圧送するようにした血液ポンプ(50c)の形態の第1のタイプの潅流装置と、状態を感知してこの状態に関連する感知信号を発生するようにした感知装置(50a、50b、50d、50e)の形態の第2のタイプの潅流装置とを備えている。この潅流システムは、更に、電力ラインを有する電力ネットワークと、潅流装置を電力ネットワークに選択的に接続する手段と、オペレータからの制御コマンドを受信する入力装置(116)付きコントローラ(20)とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、種々の医療処置に関連して血液の選択的酸素化、濾過、および再循環に対応できるようにした医療潅流システムに関するものである。
【背景技術】
【0002】
従来の潅流システムは、医療処置の間、患者の血液を酸素化、濾過、および/または再循環するために利用される。そのような潅流システムは、医療処置時に患者から脱血する流体導管と、患者に血液を復液する別の流体導管と、これら導管を通して血液を圧送する1つ以上の血液ポンプと、血液ポンプと協働するフローセンサおよび/またはレベルセンサなど複数の感知装置とを有することができる。この潅流システムは、空気塞栓センサ、温度センサ、フローオクルダー等を備える場合もある。
【発明の開示】
【発明が解決しようとする課題】
【0003】
一般に、潅流システムには、特定目的に使用するように特別設計された構造が設けられている。例えば、潅流システムのうちの1つは完全機能心肺装置として特別設計され、別の潅流システムは心室補助システムとして特別設計される。或る目的に合わせて設計された潅流システムを、他の目的で利用できる潅流システムに転換することも可能であるが、そのような再構成は一般に困難および/または面倒である。
【課題を解決するための手段】
【0004】
本発明は、患者の治療に関連して使用するための医用潅流システムに関するものである。本発明の一形態において、潅流システムは、患者に連結された流体導管を介して血液を圧送するようにした血液ポンプの形態の第1のタイプの潅流装置と、状態を感知して状態に関連する感知信号を発生するようにした感知装置の形態の第2のタイプの潅流装置とを備える。潅流システムは、電力ラインを有する電力ネットワークと、 潅流装置を電力ネットワークに選択的に接続する手段と、オペレータからの制御コマンドを受信する入力装置付きコントローラと、を有している。
【0005】
潅流装置を電力ネットワークに選択的に接続する手段は、比較的低レベルの電流を供給する手段と、比較的高レベルの電流を供給する手段と、低レベルまたは高レベルの電流を選択的に供給する手段とを備えていてもよい。選択的接続手段は、電力入力、電力出力、電力入力と電力出力の間に結合されたスイッチ、および電力入力と電力出力の間に連結された抵抗手段を備えていてもよい。潅流システムは、データ通信ネットワークを備え、潅流装置と、潅流装置の間でデジタルデータパケットの形態でメッセージを送信する手段とをデータ通信ネットワークを通して作用的に相互接続してもよい。
【0006】
別の態様において、本発明は、第1の状態を感知して第1の状態に関連する第1の感知信号を発生する第1の感知装置と、第2の状態を感知して第2の状態に関連する第2の感知信号を発生する第2の感知装置と、感知信号のうちの1つのみに基づいて、血液の圧送などの物理的動作を制御する制御装置の形態の潅流装置とを有する潅流システムに関するものである。潅流システムは、物理的動作を制御する制御装置と、オペレータからの制御コマンドを受信する入力装置を備えたコントローラとに、いずれの感知信号を供給するかを指定する手段を有する。制御装置は、例えば、流体導管を通して血液を圧送する血液ポンプであることが可能であり、感知装置はフローセンサまたはレベルセンサであることが可能である。指定手段は、潅流システムのメモリに記憶されているメッセージ識別データから構成されていてもよい。
【0007】
潅流システムは、データ通信ネットワークを備え、潅流装置と、潅流装置の中の、デジタルデータパケットの形態でメッセージを送信する手段とをデータ通信ネットワークを通して作用的に相互接続してもよい。その場合、指定手段は、送信されたいずれか感知メッセージの一部と、メモリに記憶されているメッセージ識別データとを比較する手段を備えることができる。メッセージは、いずれかの感知信号に関連する感知メッセージと、この感知信号のうちの1つとは無関係な非感知メッセージとを含むことが可能であり、潅流システムは、感知メッセージに対して相対的に高い優先度を割当て、非感知メッセージに相対的に低い優先度を割り当てる手段を備えることができる。
【発明を実施するための最良の形態】
【0008】
本発明の前述および他の特徴は、以下に簡単に説明されている図面を参照しながらなされる好適実施例の詳細な説明から、当業者にはっきり理解されるであろう。
【0009】
好適実施態様の詳細な説明
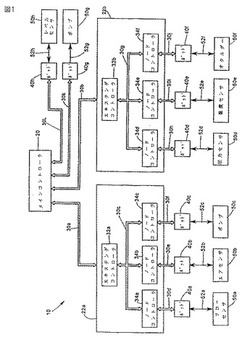
図1に、本発明による医用潅流システム10の好適実施態様を示す。潅流システム10は、種々の医療処置に関連して血液の選択的酸素化、濾過、および再循環に対応できるように構成されている。潅流システム10は、それぞれ種々の医療処置に対応する数多くの種々機器構成に配置できる。例えば、潅流システム10は、完全機能心肺装置、心室補助システム、または手術中の血液吸引または心筋保護の実施など種々目的に利用できる単一ポンプシステムとして構成してもよい。
【0010】
図1において、メインコントローラ20は、データ/電力バス30aを介してネットワークエキステンダ22aに接続され、データ/電力バス30bを介してネットワークエキステンダ22bに接続されている。ネットワークエキステンダ22aは、データ/電力バス30cを介して3つのノードコントローラ34a、34b、34cに接続されているエキステンダコントローラ32aを備える。ノードコントローラ34aは、データ/電力バス30dを介してアダプタポッド40aに接続され、アダプタポッド40aは、更に、双方向データ/電力ライン52aを介してフローセンサ50aの形態の潅流装置50に接続されている。ノードコントローラ34bは、データ/電力バス30eを介してアダプタポッド40bに接続され、アダプタポッド40bは、双方向ライン52bを介して空気塞栓センサ50bに接続されている。ノードコントローラ34cは、データ/電力バス30fを介してアダプタポッド40cに接続され、アダプタポッド40cは、双方向ライン52cを介して血液ポンプ50cに接続されている。
【0011】
ネットワークエキステンダ22bは、データ/電力バス30gを介して3つのノードコントローラ34d、34e、34fに接続されたエキステンダコントローラ32bを備える。ノードコントローラ34dは、データ/電力バス30hを介してアダプタポッド40dに接続され、アダプタポッド40dは、双方向ライン52dを介して圧力センサ50dに接続されている。 ノードコントローラ34eは、データ/電力バス30iを介してアダプタポッド40eに接続され、アダプタポッド40eは、双方向ライン52eを介して温度センサ50eに接続されている。ノードコントローラ34fは、データ/電力バス30jを介してアダプタポッド40fに接続され、アダプタポッド40fは、双方向ライン52fを介してフローオクルダー50fに接続されている。
【0012】
メインコントローラ20は、アダプタポッド40gに接続された双方向ライン52gを介して、血液ポンプ50gに作用的に結合されている。ポッド40gは、データ/電力バス30kを介してメインコントローラ20に接続されている。 メインコントローラ20は、アダプタポッド40hに接続された双方向ライン52hを介してレベルセンサ50hに作用的に結合され、アダプタポッド40hは、データ/電力バス30Lを介してメインコントローラ20に接続されている。
【0013】
本明細書で使用する「潅流装置」という用語は、遠心ポンプまたは軸流ローラポンプなどの血液ポンプ、フローセンサ、圧力センサ、温度センサ、レベルセンサ、空気塞栓センサ、またはオクルダーを、特に限定されずに備える潅流システム用に設計された装置である。
【0014】
ネットワーク構成要素の機械的構造
図2に、メインコントローラ20の一機械的実施態様の一部の斜視図を示す。図2において、メインコントローラ20は、模式的に示されている4つのネットワークコネクタ60有している。それぞれのネットワークコネクタ60は全く同一で、同じコネクタ構成を有する。図5に、コネクタ60の構造を示す。図5に示すように、コネクタ60のそれぞれは、例えば非対称な金属ハウジング64によって一部分が囲まれている9本の導電ピン62を有する標準的なパソコン用コネクタであってもよい。
【0015】
図3は、図1に模式的に示したネットワークエキステンダ22の一実施態様の斜視図である。ネットワークエキステンダ22のそれぞれは、1つの側面に68に3つのコネクタ70が配置され、対向する側面にコネクタ72が配置された六面体のハウジング66を備える。コネクタ70のそれぞれはコネクタ60と全く同一で、図5に示す構造を有している。図6に示すコネクタ72は、プラスチックなどの絶縁材料から構成された非対称なハウジング76中に、9つのピンレセプタクル74が形成されている。ピンレセプタクル74は、コネクタ60の9本のピンの位置と一致するように配置されている。その結果、コネクタ72はコネクタ60同じコネクタ配置構成を有しており、従ってコネクタ60に差し込まれることが可能である。 図4は、図1に模式的に示したアダプタポッド60の斜視図である。図4を参照すると、アダプタポッド40のそれぞれは、1つの側面82にコネクタ84が配置され、対向する側面にコネクタ86が配置された六面体のハウジングを有する。
【0016】
コネクタ84は、前述の潅流装置50に連結される装置コネクタ(不図示)に接続されるようになっている。コネクタ84は、コネクタ60、70、72、86とは異なるコネクタ配置構成を有している。6本の導電ピン88を備えるようにしたコネクタ84の一構造例を、図7に示す。アダプタポッド40のそれぞれは、種々タイプの潅流装置50(ポンプ50c、50gは、ローラポンプまたは遠心ポンプなど、種々タイプのポンプであってよい)に接続されるようになっているので、アダプタポッド40のそれぞれに配設されているコネクタ84は、種々のコネクタ配置構成であってよい。
【0017】
メインコントローラ20のコネクタ60およびネットワークエキステンダ22のコネクタ70は、アダプタポッド40のコネクタ86と同じコネクタ配置構成を備えるので、いずれのアダプタポッド40も、全部のコネクタ60、70に差し込める点に留意されたい。その結果、任意の潅流装置50の組合わせをメインコントローラ20に接続できる。
【0018】
図8に、ネットワークエキステンダ22と、ネットワークエキステンダ22に接続したアダプタポッド40とを有するメインコントローラを示す。 図8のアダプタポッド40のそれぞれは、対応コネクタ(不図示)を介して図1記載の潅流装置50のうちの対応するものに接続され、対応コネクタはケーブルによって潅流装置50とつながれている。
【0019】
図3および図8に示すネットワークエキステンダ22の形態により、結果的に得られる制御部は小型化され、しかも種々構造を有するネットワークエキステンダを使用できる。例えば、ハウジング66に固定されたコネクタ72を有するのではなく、ケーブルを介してハウジング66にコネクタ72を接続できる。あるいは、ハウジング66を無くし、ケーブルを介してコネクタ70、72を相互接続することができる。
【0020】
電子回路
図1に模式的に示したメインコントローラ20のブロック図を図9に示す。図9において、メインコントローラ20は、いずれもアドレス/データバス112によって相互接続されている、マイクロプロセッサ(MP)100、ランダムアクセスメモリ102、ハードディスクまたはフラッシュRAMなどの不揮発性メモリ104、ネットワークコントローラ106、作図コントローラ108、および入出力(I/O)回路110を有する。I/O回路110は、CRTまたはフラットパネルディスプレイなどの表示装置114と、キーボードまたは電子マウスまたは表示装置114のタッチスクリーンなどの入力装置116とに接続されている。
【0021】
メインコントローラ20は、接地ラインを基準として一対の電力ラインに+5ボルトおよび+24ボルトのDC電力を発生する、内部変圧器(不図示)を備える、外部AC電源に接続された電力供給回路118も有している。接地ラインおよび電力ラインは、いずれも図9に概略的に120で示されている。電力および接地ライン120は、データ/電力バス30mを介して4つのノードコントローラ34g〜34Jのそれぞれに接続され、ネットワークバス30の他の部分を介して別のノードコントローラに接続されている。The データ電力バス30mは、ネットワークコントローラ106に接続される多数の通信ラインを備える。
【0022】
図10は、図1に模式的に示したエキステンダコントローラ32a(エキステンダコントローラ32a、32bの設計は同一)のブロック図である。図10において、エキステンダコントローラ32aはコントローラ130およびスイッチ132を有し、コントローラ130およびスイッチ132はいずれもデータ電力バス30aに接続されている。エキステンダコントローラ32aは、双方向信号ライン133を介して、その親ノードコントローラ34gに接続されている。本明細書で使用する「親」装置は、メインコントローラ20のネットワークコントローラ106(図9)のより近くに接続されている装置である。 ノードコントローラ34gは、ライン133を介してエキステンダコントローラ32aに一意の物理アドレスを送信し、エキステンダコントローラ32aは、ライン133を介してノードコントローラ34gに周期的にチェックインコードを送信するのに使うドライバ回路135を有している。チェックインコードおよび物理アドレスは、同一バイナリコードであってもよい。
【0023】
図11に、図1に模式的に示したノードコントローラ34a(全部のノードコントローラ34の設計は同一)のブロック図を示す。図11において、ノードコントローラ34aはコントローラ140を有し、コントローラ140は、ライン134のいずれかを介してエキステンダコントローラ32aからイネーブル信号またはディスエーブル信号を受信し、ライン133を介してアダプタポッド40aから周期的なチェックインコードを受信する。コントローラ140は、多重信号ライン146を介してコード発生器144に接続されている。コード発生器144は、ノードコントローラ34aの物理アドレスを一意に特定する所定のマルチビットバイナリコードを発生する。コード発生器144は、例えば、1本のラインがコードの各ビットに対応し、それぞれのラインが+5ボルト(論理“1”)または接地(論理“0”)に選択的に接続される、多数のプリント金属回路線であってもよい。
【0024】
コントローラ140は、データバス152を接続または切断するスイッチ150を作動する。データバス152は、データ/電力バス30c、30d(および、ネットワークを構成する他のバス30)の一部である独立した2つのデータラインから構成されていてもよい。スイッチ150が開状態のときにデータバス30c、30dは切断されており、スイッチ150が閉状態のときにバス30c、30dは接続されて、アダプタポッド40aと、ネットワーク30に接続された他の装置との間のデータ通信が可能になる。
【0025】
コントローラ140は、電力ライン120aの+24ボルトのDC電力(接地ライン120cを基準として)をアダプタポッド40aに供給するかどうかを制御するスイッチ154と、電力ライン120bの+5ボルトのDC電力をアダプタポッド40aに供給するかどうかを制御するスイッチ158とを作動する。電力ライン120a、120bは、データ/電力バス30c、30dおよびネットワークを構成する他のバス30の一部である。スイッチ154と並列に抵抗162が接続され、スイッチ158と並列に抵抗164が接続されている。抵抗162、164は、スイッチ154、158が開状態のときに電力ライン120a、120bから電流が大量供給されるのを防止する限流抵抗器として作用する。コントローラ150はドライバ回路170に接続され、ドライバ回路170はコード発生器144が発した物理アドレスをライン133を介してアダプタポッド40aに送信するために使用される。
【0026】
図1に模式的に示したアダプタポッド40aのブロック図を図12に示す。図12において、アダプタポッド40aは、電力ライン120a、120bに接続された電源182によって電力供給されるコントローラ180を有する。コントローラ180は、ドライバ184を介してライン133にチェックインコードを送信してもよい。コントローラ180は、データバス152からネットワークメッセージを受信するとともに、送受信器186を介してデータバス152にメッセージを送信する。
【0027】
コントローラ80は、メモリ180とデバイスインタフェース回路190とに接続されている。デバイスインタフェース回路190は、コネクタ84(図7)を介して潅流装置50aに接続されている複数のデータライン192および複数の電力ライン194を有する。コントローラ180は、データライン192を介して潅流装置50aに種々タイプのデータ信号を送信させる。
【0028】
アダプタポッド40を接続する潅流装置50のタイプに応じて、データライン192上の信号は、例えば、所望のポンプ速度または操作モードといった潅流装置50の制御に関連するデジタルまたはアナログ信号(例えば、4〜20個のma信号)を含んでいてもよい。使用されるデータライン192の本数は、アダプタポッド40を接続する特定潅流装置50によって異なる。
【0029】
コントローラ180は、電力ライン194を介し潅流装置50に対して種々のタイプの電力を送信させる。前述の電力タイプとして、例えば,+5ボルトのDC電力または+24ボルトのDC電力がある。別の電圧レベルの電力が必要な場合、伝量供給回路182がDC/DC変換器を有していてもよい。
【0030】
潅流回路の構成と表示
医療処置に潅流システム10を使用するのに先立ち、オペレータは、図8に記載されているように、所望のアダプタポッド40および/またはネットワークエキステンダ22をメインコントローラ20に物理的に接続することによって、所望の潅流装置50をメインコントローラ20に接続する。
【0031】
医療処置の実施に先立ち、メインコントローラ20が実行する構成コンピュータプログラムルーチン200のフローチャートである図13A記載の構成プロセスのときに潅流システム10の構成が行われる。図13Aにおいて、ステップ202で、メインコントローラ20のメモリ104から前回の構成ファイルをロードすべきか否かを要求する、オペレータに対する視覚的プロンプトが生成される。構成ファイルは、一般に、潅流回路の画像に対応する画像データを有している。潅流回路の画像は、患者の輪郭、患者に接続されている複数の流体導管の画像、およびシステム10に使用されるそれぞれの種潅流装置50の画像を含んでもよい。潅流装置50のそれぞれは、潅流装置のタイプに応じて別々の画像で表されてもよい。例えば、ポンプはポンプ画像で表してもよく、フローセンサは別の画像であってもよい。
【0032】
構成ファイルは、装置の製造業者および型番、装置の所望動作モード、アラームを作動させる数値的限界、および協働させる潅流装置の識別など、潅流装置50に関連するデータを含んでもよい。本明細書で制御装置として言及されている、物理的プロセスの制御に利用される一方の潅流装置が、本明細書で感知装置として言及されている他方の潅流装置からフィードバックを受け取る場合、2つの潅流装置を「協働」させてもよい。
【0033】
例えば、図1において、ポンプ50gは、レベルセンサ50h(液体リザーバ内の液位を示す信号を発生する)またはフローセンサ50aが発生するフィードバックに基づいて制御されることが可能である。ポンプ50gは、前者の場合はリザーバ内の所定液位を維持するように制御され、後者の場合は導管内の所定流量を維持するように制御されることが可能である。比例積分(PI)または比例積分偏差(PID)制御といった任意タイプの従来のフィードバック制御を利用することができる。レベルセンサ50hの出力に基づいてポンプ50gを制御したい場合、ポンプ50gとレベルセンサ50hとの連係を公正ファイルに記憶する。
【0034】
図13Aを参照すると、ステップ202で、オペレータが構成ファイルのロードを要求すると、ステップ204に進んで、いずれかの構成ファイルを選択するようにオペレータに指示メッセージを出す。オペレータが前回記憶した構成ファイルを選択することを望まない場合、ステップ206に進んで、所定数の種々タイプの潅流回路画像から1つを選択する。潅流回路画像のそれぞれは、種々の医療処置に利用できる潅流回路に対応させることが可能である。2種類の潅流回路画像を図14A、図14Bに示し、以下に説明する。
【0035】
ステップ204で選択された構成ファイルまたはステップ206で選択された潅流回路画像に対応する潅流回路画像が、ステップ208でディスプレイ114に表示される。ディスプレイ114に表示させてもよい一組の潅流回路画像例を、図14Aと図14Bに示す。
【0036】
図14Aには、左心室補助装置(LVAD)に対応する潅流回路の画像232が示されている。潅流回路画像232は、患者の画像234、患者の左心室から脱血する流体導管の画像236、ポンプの画像238、患者の大動脈に血液を復液する流体導管の画像240、および.空気塞栓センサの画像一組246を含んでいる。
【0037】
構成に相当する潅流回路の画像248が記載されている。潅流回路画像248は、図14Aに記載されている全部の画像のほかに、第2の血液ポンプの画像150と、患者の右心室から脱血する導管の画像252と、患者の肺動脈に血液を復液する導管の画像254とが含まれている。図14Aと図14Bに示されている潅流回路画像のそれぞれは、他タイプの潅流回路画像とともに、メインコントローラ20のメモリ104に予め記憶しておくこともできる。
【0038】
ステップ210で、オペレータは多数のオプション中から1つを選択して、潅流システム10の構成を変更してもよい。ステップ212で決定される、潅流装置50を追加するというオプションをオペレータが選択した場合、ステップ214に進んで、ディスプレイ114に表示された潅流回路画像に追加するためにポンプまたはフローセンサなどの潅流装置50のタイプを選択するようにとの指示メッセージをオペレータに出す。
【0039】
ステップ216で、オペレータは、新たに選択した潅流装置50の画像を表示させる位置を選択する。オペレータは、この位置を電子マウスで指定することができ、表示した潅流回路画像は、潅流装置50を結合できる多数の可能結合個所256(図14A)を備えることができる。可能結合個所256がオペレータに容易に分かるように、可能接合点256をカラーボールド表示にしたり、点滅させたりして強調表示させることができる。オペレータが位置を選択した後、ステップ218で、潅流回路のその位置に潅流装置の画像が表示される。
【0040】
ステップ220で決定される、潅流装置のいずれかを構成するというオプションをオペレータが選択した場合、ステップ222に進んで、潅流回路内装置画像の隣に、潅流装置50の現在構成を表示する。前述したように、現在構成は、潅流装置の操作モード、装置の警報範囲、連係潅流装置等を備えることができる。ステップ224で、オペレータが現在構成を変更したり、現在構成に追加してもよい。
【0041】
ステップ226で決定される、潅流装置のデータを表示するというオプションをオペレータが選択した場合、ステップ228に進んで、表示に利用できるデータが存在するかどうかを確認および判断する。そのようなデータとして、例えば、製造業者、潅流装置の型番などがある。ステップ228で決定される利用可能データが存在する場合、ステップ280に進んで、データを潅流回路の潅流装置の隣に表示する。
【0042】
潅流装置の接続
メインコントローラ20は、後から還流システム10に接続される潅流装置50に適したプラグイン手順を利用してもよい。図13Bは、メインコントローラ20によって実行されるプラグインルーチン260のフローチャートである。プラグインルーチンのとき、メインコントローラ20は、既に入力されている装置構成を、後からメインコントローラ20に接続される潅流装置構成にマッチさせる自動マッチングモードで作動してもよい。例えば、オペレータは、連続モードで作動して所定流量を連続的に圧送するように遠心血液ポンプ(コントローラ20にはまだ接続されていない)を構成してもよい。その後、血液ポンプがコントローラ20に結合されると、コントローラ20は、以前に記憶されていたポンプ構成を、血液ポンプに自動的にマッチさせる。
【0043】
図13Bにおいて、ステップ262でメインコントローラ20が自動マッチングモードの場合、ステップ264に進んで、接続されたばかりの潅流装置と、以前に記憶されている装置構成との間の可能マッチングが1通りだけであるかどうかを判断する。これは、以前に記憶されたポンプ構成が1通りだけで、しかもメインコントローラ20に接続されたばかりの装置がポンプである場合に該当する。
【0044】
ステップ264の判断により可能マッチングが1通りだけの場合、ステップ266に進んで、潅流回路画像中に装置を表示する場所が既知かどうかを判断する。以前に記憶されている装置構成にこの位置を備えることができる。位置不明の場合、ステップ268に進んで、位置を選択するようにとの指示メッセージをオペレータに出し、その後、ステップ270に進んで、新たに接続された潅流装置の画像を潅流回路画像の中に表示する。ステップ266の判定により、装置位置が既知の場合、ステップ268を飛ばして、直接ステップ270に進む。
【0045】
ステップ262の判断により、メインコントローラ20が自動マッチングモードでない場合、または、ステップ264の判断により、複数通りの可能マッチングが存在する場合、ステップ272に進む。新たに接続した装置が、既に構成済みである場合、ステップ274に進んで、既に記憶されている複数の構成の中から適切な構成を選択するようにとの指示メッセージをオペレータに出す。装置がまだ構成されていない場合、ステップ276に進んで、オペレータを、その装置の所望構成パラメータに入れる。その後、前述のステップ268とステップ270が実行される。
【0046】
ネットワーク通信
CANバージョン2.0Bなどの従来のネットワークコントローラであってもよい、メインコントローラ20内のネットワークコントローラ106(図2)は、デジタルパケットを送受信する(2本のワイヤから構成される)データバス152をそれぞれ備えるネットワークバス30を流れるデータを監視する。データパケットのフォーマットは、1)フレーム開始(SOF)フィールド、2)仲裁(arbitration)フィールド、3)制御フィールド、2)可変長データフィールド、5)巡回冗長検査(CRC)フィールドなどのエラー検出/修正フィールド、6)確認応答(ACK)フィールド、7)フレーム終結(SOF)フィールドから成るデータフィールドから構成される従来のフォーマットであってもよい。
【0047】
ネットワークバス30のデータパケット同報通信の優先度を判断するために使用される。優先度は、データパケットの仲裁フィールドの全体数値を基礎とするものである。2つのデータパケットの伝送にコンフリクトが生じた場合、低い数値の仲裁フィールドを有するデータパケットに優先度がある。以下に記載するのは、メッセージタイプを指定するメッセージ識別(ID)コードを含む、使用してよいデータパケットタイプの数だけ存在する仲裁フィールドである。
【0048】
【表1】

【0049】
上の表は、メッセージタイプの優先度の最も高いもの(一番上)から優先度の最も低いものまでが表示されている。Aタイプのメッセージは、ネットワークデータバスに接続されている全装置に対してメインコントローラ20が制御メッセージを同報通信することに対応する。データフィールド“cccccccc cccccccc”は、メッセージタイプを設定するために使用される。Bタイプのメッセージは、エキステンダコントロールに対してメインコントローラ20がメッセ時を同報通信することに対応している。データフィールド“cccccccc cccccccc”は、メッセージのタイプを設定するために使用される。
【0050】
Cタイプのメッセージは警報または安全メッセージに対応し、データフィールド“aaaaaaaa”で警報タイプを設定し、データフィールド“ssssssss”で警報メッセージを生成した装置の論理アドレスを設定する。Dタイプのメッセージは、フローセンサなどの感知装置によって生成されるサーボメッセージに対応する。データフィールド“cccccccc”は、感知されたパラメータのタイプ、例えば流量、を設定し、データフィールド“ssssssss”は、感知パラメータを生成したセンサの論理アドレスを設定する。
【0051】
Eタイプのメッセージは、メッセージタイプを設定するデータフィールド“cccccccc cccccccc”と、メッセージの所期の宛先の論理アドレスを設定するデータフィールド“dddddddd”とを有する一般的なメッセージに対応する。Fタイプのメッセージは、メッセージタイプを設定するデータフィールド“cccccccc cccccccc”と、メッセージソースの論理アドレスを設定するデータフィールド“ssssssss”とを有する一般的なメッセージに対応する。
【0052】
Gタイプのメッセージは、メッセージタイプを設定するデータフィールド“cccccccc”と、メッセージの所期の宛先の物理アドレスを設定するデータフィールド“dddddddd dddddddd”とを有する一般的なメッセージに対応する。Hタイプのメッセージは、メッセージタイプを設定するデータフィールド“cccccccc”と、メッセージソースの物理アドレスを設定するデータフィールド“ssssssss ssssssss”とを有する一般的なメッセージに対応する。Iタイプのメッセージ(すべて論理“1”)は、ネットワークデータバスに接続された全装置に周期的に同報通信される、メインコントローラ20からのステータス要求に対応する。
【0053】
前述のメッセージタイプの中には、データフィールド無しで伝送されるものがある。例えば、メインコントローラ20からのステータス要求メッセージには、データフィールドが無い。他のメッセージはデータフィールドを有している。例えば、サーボメッセージ(上記Dタイプ)は、1分当たり0.257リットルという流量読取値など、感知された状態の数値を設定する特定するデータフィールドを備える。
【0054】
メインコントローラ20、エキステンダコントローラ32、およびアダプタポッド40は、CRCフィールドを介して受信されたメッセージの精度を確認し、正確に受信されていなかったメッセージの再送信を要求し、正確に受信されるメッセージを受信したことに応じて確認応答メッセージを伝送する、従来の電子機器回路を備えていてもよい。
【0055】
前述のメッセージは、ネットワーク30に接続された全装置に送信または同報通信されてもよい。ポッド40またはエキステンダコントローラ32などの装置のそれぞれは、同報通信される特定メッセージについてのみ、受信によって判別することができる。例えば、この判別は、受信装置と関係のある、受信装置以外の全装置の論理アドレスを記憶している、受信装置内のメッセージ判別メモリにアクセスすることによって実施されることが可能である。
【0056】
例えば、フローセンサ50aからのフィードバック信号受信に基づいて導管の血液流量を制御する血液ポンプ50cに接続されたアダプタポッド40cが受信装置である場合、ポッド40cのメッセージ判別メモリにフローセンサ50aの論理アドレスが含まれているので、ポッド40cは、フローセンサ50aに接続されているポッド40aが生成する任意のメッセージを受信できる。
【0057】
メッセージ判別メモリは、メインコントローラ20の論理アドレスを含んでいるが、他の複数のポッド40の論理アドレスを含むことも可能である。従って、ネットワーク30に同報通信されるメッセージは、特定の宛先アドレスを含む必要がない(ただし、宛先アドレスを含むこともできる)点に注意されたい。
【0058】
ポッド40およびエキステンダコントローラ32は、送り主のアイデンティティではなくメッセージタイプに基づいてメッセージを判別することもできる。例えば、ポッド40は、全部のステータス要求メッセージおよび構成メッセージ(以下に記載)を受信できる。そのようなメッセージのメッセージ識別コードもメッセージ判別メモリに記憶できる。
【0059】
医療処置で潅流システム10を使用する前であって、全部の潅流装置50を前述のように構成した後、ネットワーク30に接続されている全部のポッド40に、構成メッセージを含んだデータパケットが送信される。構成メッセージには、前述の必要構成データがすべて含まれている。例えば、血液ポンプの場合、構成データはポンプ操作モード、ポンプの所望流量などである。装置関連データ(例えば、血液ポンプがフィードバックを受信しなくてはならないセンサ)など、任意の構成メッセージをポッド40が受信すると、対応する装置の論理アドレスによってメッセージ判別メモリが更新される。
【0060】
ネットワークへのポッドの接続
ネットワークデータ/電力バス30を介してアダプタポッド40とメインコントローラ29とを通信させるには、アダプタポット40がネットワーク30に接続されることが許可されていなくてはらなない。この接続は、ネットワークに接続するアダプタポッド40がメインコントローラ20に送信する開始要求メッセージによって開始される。開始要求メッセージには、接続要求元のポッド40に接続される潅流装置50のタイプを識別する第1のコードと、接続要求元のポッド50の物理アドレス(図11のコード発生器144によって指定)を識別する第2のコードとが含まれる。
【0061】
図13Cは、アダプタポッド40から開始要求メッセージを受信したことに対応して、メインコントローラ20が実施する開始ルーチン280のフローチャートである。開始ルーチン280は、メインコントローラ20が開始要求メッセージを受信したことに応じて呼び出される中断サービスルーチンであってもよい。図13Cを参照すると、ステップ2828で、メインコントローラ20によって受信された開始メッセージがデコードされて、接続要求元のポッド40に取り付けられる潅流装置40のタイプを判断するとともに、ポッド40の物理アドレスを判断する。
【0062】
ステップ284で、要求元ポッド40にフルパワーが承認されているかどうか判断する。先述したように、潅流装置40を動かす電力は、ネットワーク30を介して電源118(図9)からポッド40に供給される。電源118から与えられる電力に制限がある場合があり、その場合、メインコントローラ20は、特定数の潅流装置50だけしかネットワーク30に接続できないようにプログラムされていてもよいし、あるいは、特定タイプの潅流装置50を特定数だけしか接続できないようにプログラムされていてもよい。例えば、血液ポンプなどの制御装置は一般に感知装置より多くの電力を使うので、ネットワーク30に接続できる制御装置の数の上限をメインコントローラ20に与えてもよい。
【0063】
ステップ284で、ネットワーク30に既に接続されている潅流装置50の数と接続可能な最大数とを比較して、追加装置50の接続によって最大値を越えてしまうかどうかを判断することによって、フルパワーを承認するか否か決定できる。あるいは、接続要求元の層値が制御装置の場合は、既に接続されている制御装置数と、接続可能な制御タイプ潅流装置の最大数と比較できる。フルパワー非承認と判断された場合は、プログラムはそのまま終了する。
【0064】
フルパワー承認と判断された場合、ステップ286〜298が実行され、開始許可メッセージが生成および転送され、それによって潅流装置50に対応するポッド40がネットワーク30に接続される。特にステップ286で、新たに接続されたポッド40に対して固有論理アドレスが割り当てられる。例えば、ネットワーク30の容量が装置16個である場合、論理アドレスは4ビットのバイナリコードであってもよい。ステップ288で、論理アドレスを含む開始許可メッセージがコード化され、ステップ290で開始許可メッセージがネットワーク30を通じて送信される。
【0065】
ステップ292で、開始要求元のポッド40が、メインコントローラ20に対してローカルである場合(すなわち、ネットワークエキステンダ22無しでメインコントローラに直接に接続されているポット40gまたは40hのいずれかである場合)、ポッド40へのフルパワーは、潅流装置50に接続されているローカルノードコントローラ(すなわち、図9のノードコントローラ34i〜34jのいずれか)を介して可能となる。図11において、上記はライン134にイネーブル信号を送信することによって実施され、それによってコントローラ140がスイッチ140、154、158を閉じるので、電力ライン120a、120bにフルパワーが供給され、アダプタポッド40がデータバス152に接続される。
【0066】
図13Cにおいて、ステップ292の判断によって潅流装置がローカルな装置でない場合、ステップ296に進んで、開始要求元のポッド40と協働するノードコントローラ34の物理アドレスを含む接続メッセージを、ネットワーク30を通して送信する。以下に説明するように、エキステンダコントローラ32は、接続メッセージを受信するとそのメッセージをデコードして物理アドレスを判断し、ノードコントローラ32に接続されたライン134にイネーブル信号を送信することによって、物理アドレスを有するノードコントローラ34に接続されたエキステンダコントローラ32(すなわち、要求ポッド40と協働するノードコントローラ34)をフルパワーにする。
【0067】
ステータス要求
潅流システム10の操作時、ネットワーク30に接続された全装置が、適正に機能し且つネットワーク30を通して同報通信メッセージを受信していることを確認するために、メインコントローラ20は周期的にステータス要求メッセージをネットワーク30上のすべてのエキステンダコントローラ32とアダプタポッド40とに送信する。エキステンダコントローラ32のそれぞれおよびアダプタポッド40は、所定時間内にステータス要求に応答しなくてはならない。この時間内にステータス要求に応答しないエキステンダコントローラ32およびポッド40はネットワークから切断され、それに対応する警報メッセージが視覚ディスプレイ114に生成され、そのような事態がオペレータに警告される。
【0068】
図13Dは、メインコントローラ20によって周期的に実施されるステータス要求ルーチン300のフローチャートである。図13Dにおいて、ステップ302でステータス要求メッセージがコード化され、ステップ304でネットワーク30に接続されている全部のエキステンダコントローラ32およびアダプタポッド40にメッセージが同報通信される。前述の通り、ステータス要求メッセージは、データパケットの仲裁でただ単にすべて論理“1”であってもよい。ステップ306で、全部のエキステンダコントローラ32およびポッド40がステータス要求メッセージに応答しなくてはならない所定のタイムアウト時間が開始する。
【0069】
ステータス要求メッセージを受信すると、エキステンダコントローラ32のそれぞれおよびアダプタポッド40は、その論理アドレスとステータスを利用してステータスメッセージをコード化し、その後、ネットワーク30を通してこの状態メッセージをメイコントローラ20に同報通院する。
【0070】
図13Eは、前にルーチン300によって送信されたステータス要求メッセージに応答して送られてきた状態メッセージを受信した時にメインコントローラ20が実施する、ステータス受信ルーチン310のフローチャートである。図13Eを参照すると、ステップ312で、応答元のエキステンダコントローラ32またはアダプタポッド40の論理アドレスがステータスメッセージから判断され、ステップ314で、メッセージから装置32または40の状態が判断される。ステータスは、数多くの種々のバイナリのステータスコードで指定されてもよい。ステップ316で、装置32または40のステータスに問題がなければ、そのままプログラム終了となる。しかしながら、ステータスに問題がある場合、ステップ318に進んで、ステータスコードによって識別されるステータス状態に応答する。状態がさほど重大でなければ、メインコントローラ20は還流システム10の視覚ディスプレイ114に警告を表示するだけでよい。状態がかなり重大である場合、メインコントローラ20は、ネットワーク30から装置32または40を切断してもよい。
【0071】
図13Fは、エキステンダコントローラまたはアダプタポッド40をネットワーク30から切断させる切断ルーチン330のフローチャートである。切断ルーチン330は、1)装置32または40が前述のタイムアウト時間内にメインコントローラ20にステータスメッセージを送信しなかった場合、または2)図13Eのステップ318の判定により装置32または40の重大な動作異常の場合に応答して、メインコントローラ20によって実行される。
【0072】
図13Fにおいて、ステップ332で、切断対象の装置32または40がメインコントローラ20にとってローカルである場合、ステップ334に進んで、装置32または40を、装置32または40に接続されたメインコントローラ20内のノードコントローラ34g、34h、34iまたは34jによって切断する。図11に参照すると、切断は、ディスエーブル信号をライン134に送信することによってコントローラ140がスイッチ150、154、158を開いてデータバス152および電力ライン120a、120bが切断されることによって行われる。
【0073】
ステップ332で、切断対象装置がメインコントローラ20にとってローカルでない場合、ステップ336に進んで、切断対象装置32または40のノードコントローラ34の物理アドレスを含む切断メッセージをコード化し、その後、ステップ338に進んで、ネットワーク30を通して切断メッセージを送信する。
【0074】
切断対象装置が、ノードコントローラ34を介してエキステンダコントローラ32に接続されたポッド40である場合、エキステンダコントローラ32が切断メッセージを受信すると、エキステンダコントローラ32はメッセージをデコードして切断対象のポッドの物理アドレスを判断し、そのポッド40と協働するノードコントローラ34は、ノードコントローラ34に接続されたライン134にディスエーブル信号を送ることによってポッド40を切断する。
【0075】
メインコントローラに入力されるオペレータコマンド
医療処置に際して潅流システム10を操作しているとき、メインコントローラ20はシステムのオペレータが入力する種々のコマンドなどの入力に応答している。図13Gは、これら入力にどのようにメインコントローラ20が応答するかを示す制御コマンドルーチン350のフローチャートである。図13Gには種々の可能オペレータ入力が開示されているが、メインコントローラ20は、それ以外の他のオペレータ入力にも対応可能であることを理解されたい。
【0076】
図13Gを参照すると、ステップ352で、オペレータによる入力が制御コマンドであった場合、ステップ354に進んで、制御コマンドに対応する制御メッセージをデータパケットにコード化し、その後、ステップ356に進んで、ネットワーク30を通して制御メッセージを同報通信する。例えば、制御メッセージは、1)特定感知装置の新警報限界、2)血液ポンプの新動作モード、3)血液ポンプの新目標流量値、4)特定感知装置の新読取速度、5)ポンプ開始コマンド、6)ポンプ停止コマンド、のいずれかであることが可能である。
【0077】
ステップ358で、オペレータが特定警報のリセットを要求した場合は、ステップ360に進んで、警報を発生した装置の論理アドレスを含んでいる対応警報リセットメッセージをコード化し、ステップ362に進んで、ネットワーク30を通して警報リセットメッセージを同報通信する。ステップ364で、潅流システム10のリセットをオペレータが要求した場合は、ステップ366に進んで、対応システムリセットメッセージをコード化し、ステップ362に進んで、システムリセットメッセージをネットワーク30を通して同報通信する。
【0078】
メインコントローラによるネットワークメッセージの受信
動作時、メインコントローラ20は、ネットワーク30を通して同報通信される種々タイプのメッセージを受信する。図13Hは、メインコントローラ20が実行する受信ルーチン370のフローチャートであり、種々タイプのメッセージの受信に応じてメインコントローラ20が取る行動を説明するものである。
【0079】
図13Hを参照すると、ステップ372で、受信メッセージが警報または他の事象などの事象メッセージに対応している場合、ステップ374に進んで、表示装置114に表示される可視表示が更新され事象をオペレータに知らせ、そしてステップ376に進んで、メインコントローラ20のメモリ104に記憶される事象ログにこの事象を記録する。
【0080】
ステップ374で、受信メッセージが、フローセンサの出力を表わす数値を含むメッセージなどのデータメッセージに対応している場合は、ステップ380に進んで可視表示を更新され、そしてステップ382に進んで、データおよびこのデータを生成した装置を、メインコントローラ20のメモリ104に記憶されているデータログに記録する。
【0081】
ステップ384で、受信メッセージがステータスメッセージであった場合、ステップ386に進んで、図13Eを参照して先述したようにステータスメッセージを処理し、ステップ390で、メモリに記憶されているステータスログにステータスを記憶する。ステップ392で、受信メッセージが開始要求であった場合、ステップ394に進んで、図13Cを参照して先述したように開始要求を処理し、ステップ396で視覚表示を更新する。
【0082】
エキステンダコントローラの動作
エキステンダコントローラ32の基本機能は、ネットワーク30に対するアダプタポッド40の接続および切断を制御することである。図15Aは、それぞれのエキステンダコントローラ32のコントローラ130が実施する開始ルーチンのフローチャートである。図15Aを参照すると、ステップ422で、エキステンダコントローラ32は、内部RAMおよび内部ROMのテストなど多数の内部自己テストを実施する。ステップ424で、テストが正常終了した場合、ステップ426に進んで、ネットワークバス30にメッセージを送信し、同時に、実際にそのメッセージが送信されたか判断するために送信されたメッセージを、ネットワークバス30から受信することによって、ネットワークバス30へのエキステンダコントローラ32の接続を試験する。
【0083】
ステップ428で、データバステストが正常終了した場合、ステップ320に進んで、エキステンダコントローラ32が、ライン133を介してその親ノードコントローラ34にチェックインコードを周期的に転送することを開始する。以下に説明するように、装置(アダプタポッド40またはエキステンダコントローラ32)のそれぞれは、その親ノードコントローラ34に対して周期的にチェックインコードを送信して、ネットワーク30への接続を維持しなくてはならない。
【0084】
ステップ432で、エキステンダコントローラ32は、その親ノードコントローラ34からその物理アドレスが送信されてくるのを待機する。ステップ434で、ステップ422および426で行われたテストのいずれかが不合格だった場合、ネットワーク30を通してエラーメッセージが同報通信される。エラーメッセージには、エキステンダコントローラ32の物理アドレスと、どのテストに通らなかったかを示すバイナリコードとが含まれている。
【0085】
全部のテストに合格した場合、ステップ438に進んで、エキステンダコントローラ32の物理アドレスを含む開始要求メッセージをコード化してネットワーク30を通して同報通信する。ステップ440で、メインコントローラの開始承認メッセージを受信するまで待機し、次にステップ442で、その親ノードコントローラ34の電力ライン120a、120bを介してエキステンダコントローラ32にフルパワーを供給することが承認されるのを待機する。承認されると、ステップ444に進み、エキステンダコントローラ32が電力ライン120aおよび120bの電圧および電流を測定して、それらが指定範囲内であることを確認する。ステップ446で、電力測定値が指定範囲外の場合、ステップ436に進んで、この結果に対するメッセージをネットワーク30を通じてメインコントローラ20に同報通信する。
【0086】
図15Bは、エキステンダコントローラ32がメインコントローラ20から接続メッセージを受信したときにエキステンダコントローラ32が実行する接続ルーチン450のフローチャートである。図15Bを参照すると、ステップ452で、メインコントローラ20から受信した接続メッセージがデコードされ、ネットワーク30に接続するアダプタポッド40の物理アドレスが判断される。ステップ454で、物理アドレスが確認され、接続されるアダプタポッド40が、エキステンダコントローラ32にとってローカルであるかどうか判断される、これは、アダプタポッド40が、エキステンダコントローラ32に接続されている3つのうちの1つであることを意味する。ポッド40がエキステンダコントローラ32にとってローカルでない場合、それ以上の動作は行われず、ルーチン450は終了する。ポッド40がエキステンダコントローラ32にとってローカルである場合、ステップ456に進み、いずれかのライン134を介して、接続しようとするアダプタポッド40と協働するノードコントローラ34にイネーブル信号を送信し、それによってアダプタポッド40を前述のようにネットワーク30に対して接続状態にする。
【0087】
エキステンダコントローラ32がメインコントローラ20からの切断メッセージを受信すると、図15C記載の切断ルーチン460がエキステンダコントローラ32によって実行される。図15Cを参照すると、ステップ462で、メインコントローラ20から受信された切断メッセージをデコードして、ネットワーク30から切断されるアダプタポッド40の物理アドレスを判断する。ステップ464で、物理アドレスを確認して、切断対象のアダプタポッド40がエキステンダコントローラ32にとってローカルであるかどうか判断する。ポッド40がローカルでない場合、それ以上の動作は行われない。ポッド40がローカルである場合、ステップ466に進み、いずれかのライン134を介して、切断しようとするアダプタポッド40と協働するノードコントローラ34にディスネーブル信号を送信し、それによってアダプタポッド40を前述のようにネットワーク30に対して切断状態にする。
【0088】
ノードコントローラの動作
ノードコントローラ34の基本機能は、ネットワーク30に対してアダプタポッド40(ノードコントローラ34がアダプタポッド40の親である場合)およびエキステンダコントローラ32(ノードコントローラ34がキステンダコントローラ32の親である場合)を接続および切断することである。接続または切断は、前述のように、メインコントローラ20から、または、ノードコントローラ34と協働するエキステンダコントローラ32から受信されるイネーブルまたはディスエーブル信号に基づいて実施される。また、ノードコントローラ34のそれぞれは、対応装置32または40が周期的にチェックインを行うことを要求する。装置32または40が適切なチェックインコードでチェックインを行わなかった場合、ノードコントローラ34はネットワーク30から装置32または40を切断する。
【0089】
図16Aは、ノードコントローラ34のそれぞれが実行するノードルーチン470のフローチャートである。ルーチン470は、対応装置32または40が出力したチェックインコードをノードコントローラ34が受信したときに実行される。図16Aを参照すると、ステップ472で、装置32または40から受信したコードが有効でなかった場合、それ以上の動作は行われずルーチンは終了する。チェックインコードは、ノードコントローラ34のコード発生器144(図11)によって指定される物理アドレスであってもよい。コードが有効かどうか判断するために、ノードコントローラ34は、受信コードを所定コードと一致するか比較して判断してもよい。
【0090】
チェックインコードが有効だった場合、ステップ474に進み、タイムアウトタイマーを再スタートする。タイムアウトタイマーは、装置32または40が有効チェックインコードを送信しなくてはならない所定時間を把握する。ステップ476で、ノードコントローラ34は、コード発生器144が生成した物理アドレスを、ポッド40に送信する。ステップ478で、ノードコントローラ34は、スイッチ150に信号を送ってスイッチ150を閉じさせることによって(または、既に閉じている場合は閉じた状態を維持することによって)、装置32または40をデータバス152(図11)に接続する。
【0091】
ステップ480で、ノードコントローラ34に接続されたライン134にイネーブル信号が存在する場合、ノードコントローラ34は、スイッチ154、158(図11)に信号を送信することによって装置32または40にフルパワーを供給し、スイッチ154、158を閉じさせる(または、既に閉じている場合は閉じた状態を維持させる)。
【0092】
ステップ480の判断によりイネーブル信号が存在しなかった場合、ステップ484に進んで、スイッチ150を開くことによってデータバス152から装置32または40を切断し、ステップ484に進んで、スイッチ154、158を開くことによって電力ライン120a、120bから装置32または40を切断する。
【0093】
装置32または40が、タイムアウト時間内にノードコントローラ34に有効チェックインコードを送信しなかった場合、ノードコントローラ34は図16Bに示したタイムアウトルーチンを実行する。図16Bを参照すると、ステップ492で、スイッチ150を開くことによってデータバス152から装置32または40を切断し、ステップ494で、スイッチ154、148を開くことによって電力ライン120a、12bから装置32または34を切断する。
【0094】
アダプタポッドの動作
アダプタポッド40は、メインコントローラ20によって送信された構成および制御メッセージの受信、流量などの感知された状態の数値を含む感知メッセージの受信、および/またはネットワーク30による感知メッセージの送信など、数多くの機能を実施する。以下にこれらの機能を説明する。
【0095】
図17Aは、それぞれのアダプタポッド40のコントローラ180が実行する開始ルーチン520のフローチャートである。図17Aを参照すると、ステップ522で、アダプタポッド40が、内部RAMおよび内部ROMのテストなど数多くの内部自己テストを実行する。ステップ524でテストが正常終了すると、ステップ526に進んで、データバス152にメッセージを送信すると同時に、メッセージが確かに送信されたかを判断するために送信されたメッセージをデータバス152から受信することによって、ポッド40とデータバス152との接続を試験する。
【0096】
ステップ528でデータバステストが正常終了すると、ステップ530に進んで、アダプタポッドがライン133を介してその親ノードコントローラ34に周期的にチェックインコードを送信しはじめる。ステップ532で、ポッド40は、その親ノードコントローラ34からその物理アドレスが送信されてくるのを待機する。ステップ534で、ステップ522および526で実施したテストのいずれかに合格しなかった場合、ネットワーク30を介してエラーメッセージを同報通信する。エラーメッセージには、ポッド40の物理アドレスと、合格しなかったテストを特定するバイナリコードとが含まれる。
【0097】
全試験に合格だった場合、ステップ538に進んで、アダプタポッド40の物理アドレスを含む開始要求メッセージをコード化してネットワーク30を通じて同報通信する。ステップ540で、メインコントローラ20から開始承認メッセージが出力されるまで待機し、その後、ステップ542で、その親ノードコントローラ34の電力ライン120a、120bを介してアダプタポッド40にフルパワーが承認されるのを待機する。フルパワーが承認されると、ステップ544に進み、ポッド40が電力ライン120a、120bの電圧と電流を測定し、それらが指定範囲内であるか確認する。ステップ546で電力測定値が指定範囲内にない場合、ステップ536に進んで、その結果に対するメッセージをネットワーク30を通してメインコントローラに同報通信する。
【0098】
動作時、アダプタポッド40はネットワークを通してメインコントローラ20から制御または構成メッセージを受信してもよい。図17Bは、アダプタポッド40がメッセージを受信するときに実行される受信ルーチン550のフローチャートである。図17Bを参照すると、ステップ552で、メッセージがデコードして、メッセージに埋め込まれた制御コマンドを判断し、ステップ554で、ポッド40に接続された潅流装置50に制御信号を(図12の1つ以上のデータライン192を介して)送信する。
【0099】
動作時、アダプタポッド40はいずれかのデータライン192を介して潅流装置50から警報信号を受信してもよい。そのような警報信号を受信すると、ポッド40は図17C記載の警報ルーチン560を実行する。図17Cを参照すると、ステップ562で、警報および警報タイプを生成する潅流装置40の論理アドレスとともに警報メッセージをコード化し、ステップ564で、ネットワーク30を通してメインコントローラ20に警報メッセージを同報通信する。
【0100】
動作時、フローセンサなど、感知信号を発生する潅流装置50に接続されているアダプタポッド40は、いずれかのライン152を介して感知信号の数値を周期的に読み取る。感知信号の連続読取の間隔は、前述の構成工程のときに指定してもよい。図17Dは、感知信号の値を読み取る時間になったときに実行される感知ルーチン570のフローチャートである。図17Dを参照すると、ステップ572で、いずれかのデータライン152を介して感知信号を読み取る。ステップ574で、感知信号の数値を、感知信号発生元の潅流装置40の論理アドレスとともに、メッセージにコード化する。次に、ステップ476で、メッセージを、ネットワーク30に接続されている全装置にネットワーク30を通して同報通信する。
【0101】
前述のように、ネットワーク30に接続されたアダプタポッド40のそれぞれには、ネットワーク30に接続された装置サブセットだけからのメッセージを選択受信するために使用されるメッセージ判別回路が設けられていてもよい。ステップ576で感知メッセージが同報通信されるときにメッセージを受信する装置は、メインコントローラ20(ネットワーク30を通して同報通信される全メッセージを受信してもよい)、および、感知メッセージにコード化された感知信号の値に基づいて制御される特定潅流装置50だけである。
【0102】
アダプタポッドは前述以外の機能を備えてもよいことを理解されたい。また、メインコントローラ20に設けられた単一電源からネットワークに電力を配電する代わりに、電力を、複数の電源、例えば、ネットワークエキステンダのそれぞれに1つずつ設けた電源から配電することも可能である。
【0103】
以上、前述の説明に鑑みて、本発明の数多くの変更態様および代替実施態様が当業者に明らかになるであろうが、上記説明は説明のためだけのものと解釈されるべきものであり、当業者に本発明を実施するベストモードを教示するためのものである。構造詳細は、実質的に本発明の精神を逸脱せずに変更されてもよく、添付クレームの適用範囲内にある全ての変更態様の排他的利用が確保されるものである。
【図面の簡単な説明】
【0104】
【図1】本発明による潅流システムの好適実施態様のブロック図である。
【図2】図1に模式的に示したメインコントローラの斜視図である。
【図3】図1に模式的に示した1つのネットワークエキステンダの斜視図である。
【図4】図1に模式的に示した1つのアダプタポッドの斜視図である。
【図5】複数のコネクタ構成の図である。
【図6】複数のコネクタ構成の図である。
【図7】複数のコネクタ構成の図である。
【図8】図1に模式的に示したメインコントローラの斜視図で、2つのネットワークエキステンダと、8つのアダプタポッドが差し込まれている。
【図9】図1に模式的に示したメインコントローラのブロック図である。
【図10】図1に模式的に示した1つのエクステンダコントローラのブロック図である。
【図11】図1に模式的に示した1つのノードコントローラのブロック図である。
【図12】図1に模式的に示した1つのアダプタポッドのブロック図である。
【図13A】図1記載のメインコントローラの動作を示すフローチャートである。
【図13B】図1記載のメインコントローラの動作を示すフローチャートである。
【図13C】図1記載のメインコントローラの動作を示すフローチャートである。
【図13D】図1記載のメインコントローラの動作を示すフローチャートである。
【図13E】図1記載のメインコントローラの動作を示すフローチャートである。
【図13F】図1記載のメインコントローラの動作を示すフローチャートである。
【図13G】図1記載のメインコントローラの動作を示すフローチャートである。
【図13H】図1記載のメインコントローラの動作を示すフローチャートである。
【図14A】潅流システムの動作時に、図9の表示装置に生成される一組の潅流回路画像の表示例である。
【図14B】潅流システムの動作時に、図9の表示装置に生成される一組の潅流回路画像の表示例である。
【図15A】図1記載のエキステンダコントローラの動作を示すフローチャートである。
【図15B】図1記載のエキステンダコントローラの動作を示すフローチャートである。
【図15C】図1記載のエキステンダコントローラの動作を示すフローチャートである。
【図16A】図1記載のノードコントローラの動作を示すフローチャートである。
【図16B】図1記載のノードコントローラの動作を示すフローチャートである。
【図17A】図1記載のアダプタポッドの動作を示すフローチャートである。
【図17B】図1記載のアダプタポッドの動作を示すフローチャートである。
【図17C】図1記載のアダプタポッドの動作を示すフローチャートである。
【図17D】図1記載のアダプタポッドの動作を示すフローチャートである。
【符号の説明】
【0105】
20 メインコントローラ
32a、32b エキステンダコントローラ
34a、34b、34c、34d、34e、34f ノードコントローラ
40a、40b、40c、40d、40e、40f、40g ポッド
50a フローセンサ
50b エアセンサ
50c ポンプ
50d 圧力センサ
50e 温度センサ
50f オクルダー
50g ポンプ
50h レベルセンサ
【技術分野】
【0001】
本発明は、種々の医療処置に関連して血液の選択的酸素化、濾過、および再循環に対応できるようにした医療潅流システムに関するものである。
【背景技術】
【0002】
従来の潅流システムは、医療処置の間、患者の血液を酸素化、濾過、および/または再循環するために利用される。そのような潅流システムは、医療処置時に患者から脱血する流体導管と、患者に血液を復液する別の流体導管と、これら導管を通して血液を圧送する1つ以上の血液ポンプと、血液ポンプと協働するフローセンサおよび/またはレベルセンサなど複数の感知装置とを有することができる。この潅流システムは、空気塞栓センサ、温度センサ、フローオクルダー等を備える場合もある。
【発明の開示】
【発明が解決しようとする課題】
【0003】
一般に、潅流システムには、特定目的に使用するように特別設計された構造が設けられている。例えば、潅流システムのうちの1つは完全機能心肺装置として特別設計され、別の潅流システムは心室補助システムとして特別設計される。或る目的に合わせて設計された潅流システムを、他の目的で利用できる潅流システムに転換することも可能であるが、そのような再構成は一般に困難および/または面倒である。
【課題を解決するための手段】
【0004】
本発明は、患者の治療に関連して使用するための医用潅流システムに関するものである。本発明の一形態において、潅流システムは、患者に連結された流体導管を介して血液を圧送するようにした血液ポンプの形態の第1のタイプの潅流装置と、状態を感知して状態に関連する感知信号を発生するようにした感知装置の形態の第2のタイプの潅流装置とを備える。潅流システムは、電力ラインを有する電力ネットワークと、 潅流装置を電力ネットワークに選択的に接続する手段と、オペレータからの制御コマンドを受信する入力装置付きコントローラと、を有している。
【0005】
潅流装置を電力ネットワークに選択的に接続する手段は、比較的低レベルの電流を供給する手段と、比較的高レベルの電流を供給する手段と、低レベルまたは高レベルの電流を選択的に供給する手段とを備えていてもよい。選択的接続手段は、電力入力、電力出力、電力入力と電力出力の間に結合されたスイッチ、および電力入力と電力出力の間に連結された抵抗手段を備えていてもよい。潅流システムは、データ通信ネットワークを備え、潅流装置と、潅流装置の間でデジタルデータパケットの形態でメッセージを送信する手段とをデータ通信ネットワークを通して作用的に相互接続してもよい。
【0006】
別の態様において、本発明は、第1の状態を感知して第1の状態に関連する第1の感知信号を発生する第1の感知装置と、第2の状態を感知して第2の状態に関連する第2の感知信号を発生する第2の感知装置と、感知信号のうちの1つのみに基づいて、血液の圧送などの物理的動作を制御する制御装置の形態の潅流装置とを有する潅流システムに関するものである。潅流システムは、物理的動作を制御する制御装置と、オペレータからの制御コマンドを受信する入力装置を備えたコントローラとに、いずれの感知信号を供給するかを指定する手段を有する。制御装置は、例えば、流体導管を通して血液を圧送する血液ポンプであることが可能であり、感知装置はフローセンサまたはレベルセンサであることが可能である。指定手段は、潅流システムのメモリに記憶されているメッセージ識別データから構成されていてもよい。
【0007】
潅流システムは、データ通信ネットワークを備え、潅流装置と、潅流装置の中の、デジタルデータパケットの形態でメッセージを送信する手段とをデータ通信ネットワークを通して作用的に相互接続してもよい。その場合、指定手段は、送信されたいずれか感知メッセージの一部と、メモリに記憶されているメッセージ識別データとを比較する手段を備えることができる。メッセージは、いずれかの感知信号に関連する感知メッセージと、この感知信号のうちの1つとは無関係な非感知メッセージとを含むことが可能であり、潅流システムは、感知メッセージに対して相対的に高い優先度を割当て、非感知メッセージに相対的に低い優先度を割り当てる手段を備えることができる。
【発明を実施するための最良の形態】
【0008】
本発明の前述および他の特徴は、以下に簡単に説明されている図面を参照しながらなされる好適実施例の詳細な説明から、当業者にはっきり理解されるであろう。
【0009】
好適実施態様の詳細な説明
図1に、本発明による医用潅流システム10の好適実施態様を示す。潅流システム10は、種々の医療処置に関連して血液の選択的酸素化、濾過、および再循環に対応できるように構成されている。潅流システム10は、それぞれ種々の医療処置に対応する数多くの種々機器構成に配置できる。例えば、潅流システム10は、完全機能心肺装置、心室補助システム、または手術中の血液吸引または心筋保護の実施など種々目的に利用できる単一ポンプシステムとして構成してもよい。
【0010】
図1において、メインコントローラ20は、データ/電力バス30aを介してネットワークエキステンダ22aに接続され、データ/電力バス30bを介してネットワークエキステンダ22bに接続されている。ネットワークエキステンダ22aは、データ/電力バス30cを介して3つのノードコントローラ34a、34b、34cに接続されているエキステンダコントローラ32aを備える。ノードコントローラ34aは、データ/電力バス30dを介してアダプタポッド40aに接続され、アダプタポッド40aは、更に、双方向データ/電力ライン52aを介してフローセンサ50aの形態の潅流装置50に接続されている。ノードコントローラ34bは、データ/電力バス30eを介してアダプタポッド40bに接続され、アダプタポッド40bは、双方向ライン52bを介して空気塞栓センサ50bに接続されている。ノードコントローラ34cは、データ/電力バス30fを介してアダプタポッド40cに接続され、アダプタポッド40cは、双方向ライン52cを介して血液ポンプ50cに接続されている。
【0011】
ネットワークエキステンダ22bは、データ/電力バス30gを介して3つのノードコントローラ34d、34e、34fに接続されたエキステンダコントローラ32bを備える。ノードコントローラ34dは、データ/電力バス30hを介してアダプタポッド40dに接続され、アダプタポッド40dは、双方向ライン52dを介して圧力センサ50dに接続されている。 ノードコントローラ34eは、データ/電力バス30iを介してアダプタポッド40eに接続され、アダプタポッド40eは、双方向ライン52eを介して温度センサ50eに接続されている。ノードコントローラ34fは、データ/電力バス30jを介してアダプタポッド40fに接続され、アダプタポッド40fは、双方向ライン52fを介してフローオクルダー50fに接続されている。
【0012】
メインコントローラ20は、アダプタポッド40gに接続された双方向ライン52gを介して、血液ポンプ50gに作用的に結合されている。ポッド40gは、データ/電力バス30kを介してメインコントローラ20に接続されている。 メインコントローラ20は、アダプタポッド40hに接続された双方向ライン52hを介してレベルセンサ50hに作用的に結合され、アダプタポッド40hは、データ/電力バス30Lを介してメインコントローラ20に接続されている。
【0013】
本明細書で使用する「潅流装置」という用語は、遠心ポンプまたは軸流ローラポンプなどの血液ポンプ、フローセンサ、圧力センサ、温度センサ、レベルセンサ、空気塞栓センサ、またはオクルダーを、特に限定されずに備える潅流システム用に設計された装置である。
【0014】
ネットワーク構成要素の機械的構造
図2に、メインコントローラ20の一機械的実施態様の一部の斜視図を示す。図2において、メインコントローラ20は、模式的に示されている4つのネットワークコネクタ60有している。それぞれのネットワークコネクタ60は全く同一で、同じコネクタ構成を有する。図5に、コネクタ60の構造を示す。図5に示すように、コネクタ60のそれぞれは、例えば非対称な金属ハウジング64によって一部分が囲まれている9本の導電ピン62を有する標準的なパソコン用コネクタであってもよい。
【0015】
図3は、図1に模式的に示したネットワークエキステンダ22の一実施態様の斜視図である。ネットワークエキステンダ22のそれぞれは、1つの側面に68に3つのコネクタ70が配置され、対向する側面にコネクタ72が配置された六面体のハウジング66を備える。コネクタ70のそれぞれはコネクタ60と全く同一で、図5に示す構造を有している。図6に示すコネクタ72は、プラスチックなどの絶縁材料から構成された非対称なハウジング76中に、9つのピンレセプタクル74が形成されている。ピンレセプタクル74は、コネクタ60の9本のピンの位置と一致するように配置されている。その結果、コネクタ72はコネクタ60同じコネクタ配置構成を有しており、従ってコネクタ60に差し込まれることが可能である。 図4は、図1に模式的に示したアダプタポッド60の斜視図である。図4を参照すると、アダプタポッド40のそれぞれは、1つの側面82にコネクタ84が配置され、対向する側面にコネクタ86が配置された六面体のハウジングを有する。
【0016】
コネクタ84は、前述の潅流装置50に連結される装置コネクタ(不図示)に接続されるようになっている。コネクタ84は、コネクタ60、70、72、86とは異なるコネクタ配置構成を有している。6本の導電ピン88を備えるようにしたコネクタ84の一構造例を、図7に示す。アダプタポッド40のそれぞれは、種々タイプの潅流装置50(ポンプ50c、50gは、ローラポンプまたは遠心ポンプなど、種々タイプのポンプであってよい)に接続されるようになっているので、アダプタポッド40のそれぞれに配設されているコネクタ84は、種々のコネクタ配置構成であってよい。
【0017】
メインコントローラ20のコネクタ60およびネットワークエキステンダ22のコネクタ70は、アダプタポッド40のコネクタ86と同じコネクタ配置構成を備えるので、いずれのアダプタポッド40も、全部のコネクタ60、70に差し込める点に留意されたい。その結果、任意の潅流装置50の組合わせをメインコントローラ20に接続できる。
【0018】
図8に、ネットワークエキステンダ22と、ネットワークエキステンダ22に接続したアダプタポッド40とを有するメインコントローラを示す。 図8のアダプタポッド40のそれぞれは、対応コネクタ(不図示)を介して図1記載の潅流装置50のうちの対応するものに接続され、対応コネクタはケーブルによって潅流装置50とつながれている。
【0019】
図3および図8に示すネットワークエキステンダ22の形態により、結果的に得られる制御部は小型化され、しかも種々構造を有するネットワークエキステンダを使用できる。例えば、ハウジング66に固定されたコネクタ72を有するのではなく、ケーブルを介してハウジング66にコネクタ72を接続できる。あるいは、ハウジング66を無くし、ケーブルを介してコネクタ70、72を相互接続することができる。
【0020】
電子回路
図1に模式的に示したメインコントローラ20のブロック図を図9に示す。図9において、メインコントローラ20は、いずれもアドレス/データバス112によって相互接続されている、マイクロプロセッサ(MP)100、ランダムアクセスメモリ102、ハードディスクまたはフラッシュRAMなどの不揮発性メモリ104、ネットワークコントローラ106、作図コントローラ108、および入出力(I/O)回路110を有する。I/O回路110は、CRTまたはフラットパネルディスプレイなどの表示装置114と、キーボードまたは電子マウスまたは表示装置114のタッチスクリーンなどの入力装置116とに接続されている。
【0021】
メインコントローラ20は、接地ラインを基準として一対の電力ラインに+5ボルトおよび+24ボルトのDC電力を発生する、内部変圧器(不図示)を備える、外部AC電源に接続された電力供給回路118も有している。接地ラインおよび電力ラインは、いずれも図9に概略的に120で示されている。電力および接地ライン120は、データ/電力バス30mを介して4つのノードコントローラ34g〜34Jのそれぞれに接続され、ネットワークバス30の他の部分を介して別のノードコントローラに接続されている。The データ電力バス30mは、ネットワークコントローラ106に接続される多数の通信ラインを備える。
【0022】
図10は、図1に模式的に示したエキステンダコントローラ32a(エキステンダコントローラ32a、32bの設計は同一)のブロック図である。図10において、エキステンダコントローラ32aはコントローラ130およびスイッチ132を有し、コントローラ130およびスイッチ132はいずれもデータ電力バス30aに接続されている。エキステンダコントローラ32aは、双方向信号ライン133を介して、その親ノードコントローラ34gに接続されている。本明細書で使用する「親」装置は、メインコントローラ20のネットワークコントローラ106(図9)のより近くに接続されている装置である。 ノードコントローラ34gは、ライン133を介してエキステンダコントローラ32aに一意の物理アドレスを送信し、エキステンダコントローラ32aは、ライン133を介してノードコントローラ34gに周期的にチェックインコードを送信するのに使うドライバ回路135を有している。チェックインコードおよび物理アドレスは、同一バイナリコードであってもよい。
【0023】
図11に、図1に模式的に示したノードコントローラ34a(全部のノードコントローラ34の設計は同一)のブロック図を示す。図11において、ノードコントローラ34aはコントローラ140を有し、コントローラ140は、ライン134のいずれかを介してエキステンダコントローラ32aからイネーブル信号またはディスエーブル信号を受信し、ライン133を介してアダプタポッド40aから周期的なチェックインコードを受信する。コントローラ140は、多重信号ライン146を介してコード発生器144に接続されている。コード発生器144は、ノードコントローラ34aの物理アドレスを一意に特定する所定のマルチビットバイナリコードを発生する。コード発生器144は、例えば、1本のラインがコードの各ビットに対応し、それぞれのラインが+5ボルト(論理“1”)または接地(論理“0”)に選択的に接続される、多数のプリント金属回路線であってもよい。
【0024】
コントローラ140は、データバス152を接続または切断するスイッチ150を作動する。データバス152は、データ/電力バス30c、30d(および、ネットワークを構成する他のバス30)の一部である独立した2つのデータラインから構成されていてもよい。スイッチ150が開状態のときにデータバス30c、30dは切断されており、スイッチ150が閉状態のときにバス30c、30dは接続されて、アダプタポッド40aと、ネットワーク30に接続された他の装置との間のデータ通信が可能になる。
【0025】
コントローラ140は、電力ライン120aの+24ボルトのDC電力(接地ライン120cを基準として)をアダプタポッド40aに供給するかどうかを制御するスイッチ154と、電力ライン120bの+5ボルトのDC電力をアダプタポッド40aに供給するかどうかを制御するスイッチ158とを作動する。電力ライン120a、120bは、データ/電力バス30c、30dおよびネットワークを構成する他のバス30の一部である。スイッチ154と並列に抵抗162が接続され、スイッチ158と並列に抵抗164が接続されている。抵抗162、164は、スイッチ154、158が開状態のときに電力ライン120a、120bから電流が大量供給されるのを防止する限流抵抗器として作用する。コントローラ150はドライバ回路170に接続され、ドライバ回路170はコード発生器144が発した物理アドレスをライン133を介してアダプタポッド40aに送信するために使用される。
【0026】
図1に模式的に示したアダプタポッド40aのブロック図を図12に示す。図12において、アダプタポッド40aは、電力ライン120a、120bに接続された電源182によって電力供給されるコントローラ180を有する。コントローラ180は、ドライバ184を介してライン133にチェックインコードを送信してもよい。コントローラ180は、データバス152からネットワークメッセージを受信するとともに、送受信器186を介してデータバス152にメッセージを送信する。
【0027】
コントローラ80は、メモリ180とデバイスインタフェース回路190とに接続されている。デバイスインタフェース回路190は、コネクタ84(図7)を介して潅流装置50aに接続されている複数のデータライン192および複数の電力ライン194を有する。コントローラ180は、データライン192を介して潅流装置50aに種々タイプのデータ信号を送信させる。
【0028】
アダプタポッド40を接続する潅流装置50のタイプに応じて、データライン192上の信号は、例えば、所望のポンプ速度または操作モードといった潅流装置50の制御に関連するデジタルまたはアナログ信号(例えば、4〜20個のma信号)を含んでいてもよい。使用されるデータライン192の本数は、アダプタポッド40を接続する特定潅流装置50によって異なる。
【0029】
コントローラ180は、電力ライン194を介し潅流装置50に対して種々のタイプの電力を送信させる。前述の電力タイプとして、例えば,+5ボルトのDC電力または+24ボルトのDC電力がある。別の電圧レベルの電力が必要な場合、伝量供給回路182がDC/DC変換器を有していてもよい。
【0030】
潅流回路の構成と表示
医療処置に潅流システム10を使用するのに先立ち、オペレータは、図8に記載されているように、所望のアダプタポッド40および/またはネットワークエキステンダ22をメインコントローラ20に物理的に接続することによって、所望の潅流装置50をメインコントローラ20に接続する。
【0031】
医療処置の実施に先立ち、メインコントローラ20が実行する構成コンピュータプログラムルーチン200のフローチャートである図13A記載の構成プロセスのときに潅流システム10の構成が行われる。図13Aにおいて、ステップ202で、メインコントローラ20のメモリ104から前回の構成ファイルをロードすべきか否かを要求する、オペレータに対する視覚的プロンプトが生成される。構成ファイルは、一般に、潅流回路の画像に対応する画像データを有している。潅流回路の画像は、患者の輪郭、患者に接続されている複数の流体導管の画像、およびシステム10に使用されるそれぞれの種潅流装置50の画像を含んでもよい。潅流装置50のそれぞれは、潅流装置のタイプに応じて別々の画像で表されてもよい。例えば、ポンプはポンプ画像で表してもよく、フローセンサは別の画像であってもよい。
【0032】
構成ファイルは、装置の製造業者および型番、装置の所望動作モード、アラームを作動させる数値的限界、および協働させる潅流装置の識別など、潅流装置50に関連するデータを含んでもよい。本明細書で制御装置として言及されている、物理的プロセスの制御に利用される一方の潅流装置が、本明細書で感知装置として言及されている他方の潅流装置からフィードバックを受け取る場合、2つの潅流装置を「協働」させてもよい。
【0033】
例えば、図1において、ポンプ50gは、レベルセンサ50h(液体リザーバ内の液位を示す信号を発生する)またはフローセンサ50aが発生するフィードバックに基づいて制御されることが可能である。ポンプ50gは、前者の場合はリザーバ内の所定液位を維持するように制御され、後者の場合は導管内の所定流量を維持するように制御されることが可能である。比例積分(PI)または比例積分偏差(PID)制御といった任意タイプの従来のフィードバック制御を利用することができる。レベルセンサ50hの出力に基づいてポンプ50gを制御したい場合、ポンプ50gとレベルセンサ50hとの連係を公正ファイルに記憶する。
【0034】
図13Aを参照すると、ステップ202で、オペレータが構成ファイルのロードを要求すると、ステップ204に進んで、いずれかの構成ファイルを選択するようにオペレータに指示メッセージを出す。オペレータが前回記憶した構成ファイルを選択することを望まない場合、ステップ206に進んで、所定数の種々タイプの潅流回路画像から1つを選択する。潅流回路画像のそれぞれは、種々の医療処置に利用できる潅流回路に対応させることが可能である。2種類の潅流回路画像を図14A、図14Bに示し、以下に説明する。
【0035】
ステップ204で選択された構成ファイルまたはステップ206で選択された潅流回路画像に対応する潅流回路画像が、ステップ208でディスプレイ114に表示される。ディスプレイ114に表示させてもよい一組の潅流回路画像例を、図14Aと図14Bに示す。
【0036】
図14Aには、左心室補助装置(LVAD)に対応する潅流回路の画像232が示されている。潅流回路画像232は、患者の画像234、患者の左心室から脱血する流体導管の画像236、ポンプの画像238、患者の大動脈に血液を復液する流体導管の画像240、および.空気塞栓センサの画像一組246を含んでいる。
【0037】
構成に相当する潅流回路の画像248が記載されている。潅流回路画像248は、図14Aに記載されている全部の画像のほかに、第2の血液ポンプの画像150と、患者の右心室から脱血する導管の画像252と、患者の肺動脈に血液を復液する導管の画像254とが含まれている。図14Aと図14Bに示されている潅流回路画像のそれぞれは、他タイプの潅流回路画像とともに、メインコントローラ20のメモリ104に予め記憶しておくこともできる。
【0038】
ステップ210で、オペレータは多数のオプション中から1つを選択して、潅流システム10の構成を変更してもよい。ステップ212で決定される、潅流装置50を追加するというオプションをオペレータが選択した場合、ステップ214に進んで、ディスプレイ114に表示された潅流回路画像に追加するためにポンプまたはフローセンサなどの潅流装置50のタイプを選択するようにとの指示メッセージをオペレータに出す。
【0039】
ステップ216で、オペレータは、新たに選択した潅流装置50の画像を表示させる位置を選択する。オペレータは、この位置を電子マウスで指定することができ、表示した潅流回路画像は、潅流装置50を結合できる多数の可能結合個所256(図14A)を備えることができる。可能結合個所256がオペレータに容易に分かるように、可能接合点256をカラーボールド表示にしたり、点滅させたりして強調表示させることができる。オペレータが位置を選択した後、ステップ218で、潅流回路のその位置に潅流装置の画像が表示される。
【0040】
ステップ220で決定される、潅流装置のいずれかを構成するというオプションをオペレータが選択した場合、ステップ222に進んで、潅流回路内装置画像の隣に、潅流装置50の現在構成を表示する。前述したように、現在構成は、潅流装置の操作モード、装置の警報範囲、連係潅流装置等を備えることができる。ステップ224で、オペレータが現在構成を変更したり、現在構成に追加してもよい。
【0041】
ステップ226で決定される、潅流装置のデータを表示するというオプションをオペレータが選択した場合、ステップ228に進んで、表示に利用できるデータが存在するかどうかを確認および判断する。そのようなデータとして、例えば、製造業者、潅流装置の型番などがある。ステップ228で決定される利用可能データが存在する場合、ステップ280に進んで、データを潅流回路の潅流装置の隣に表示する。
【0042】
潅流装置の接続
メインコントローラ20は、後から還流システム10に接続される潅流装置50に適したプラグイン手順を利用してもよい。図13Bは、メインコントローラ20によって実行されるプラグインルーチン260のフローチャートである。プラグインルーチンのとき、メインコントローラ20は、既に入力されている装置構成を、後からメインコントローラ20に接続される潅流装置構成にマッチさせる自動マッチングモードで作動してもよい。例えば、オペレータは、連続モードで作動して所定流量を連続的に圧送するように遠心血液ポンプ(コントローラ20にはまだ接続されていない)を構成してもよい。その後、血液ポンプがコントローラ20に結合されると、コントローラ20は、以前に記憶されていたポンプ構成を、血液ポンプに自動的にマッチさせる。
【0043】
図13Bにおいて、ステップ262でメインコントローラ20が自動マッチングモードの場合、ステップ264に進んで、接続されたばかりの潅流装置と、以前に記憶されている装置構成との間の可能マッチングが1通りだけであるかどうかを判断する。これは、以前に記憶されたポンプ構成が1通りだけで、しかもメインコントローラ20に接続されたばかりの装置がポンプである場合に該当する。
【0044】
ステップ264の判断により可能マッチングが1通りだけの場合、ステップ266に進んで、潅流回路画像中に装置を表示する場所が既知かどうかを判断する。以前に記憶されている装置構成にこの位置を備えることができる。位置不明の場合、ステップ268に進んで、位置を選択するようにとの指示メッセージをオペレータに出し、その後、ステップ270に進んで、新たに接続された潅流装置の画像を潅流回路画像の中に表示する。ステップ266の判定により、装置位置が既知の場合、ステップ268を飛ばして、直接ステップ270に進む。
【0045】
ステップ262の判断により、メインコントローラ20が自動マッチングモードでない場合、または、ステップ264の判断により、複数通りの可能マッチングが存在する場合、ステップ272に進む。新たに接続した装置が、既に構成済みである場合、ステップ274に進んで、既に記憶されている複数の構成の中から適切な構成を選択するようにとの指示メッセージをオペレータに出す。装置がまだ構成されていない場合、ステップ276に進んで、オペレータを、その装置の所望構成パラメータに入れる。その後、前述のステップ268とステップ270が実行される。
【0046】
ネットワーク通信
CANバージョン2.0Bなどの従来のネットワークコントローラであってもよい、メインコントローラ20内のネットワークコントローラ106(図2)は、デジタルパケットを送受信する(2本のワイヤから構成される)データバス152をそれぞれ備えるネットワークバス30を流れるデータを監視する。データパケットのフォーマットは、1)フレーム開始(SOF)フィールド、2)仲裁(arbitration)フィールド、3)制御フィールド、2)可変長データフィールド、5)巡回冗長検査(CRC)フィールドなどのエラー検出/修正フィールド、6)確認応答(ACK)フィールド、7)フレーム終結(SOF)フィールドから成るデータフィールドから構成される従来のフォーマットであってもよい。
【0047】
ネットワークバス30のデータパケット同報通信の優先度を判断するために使用される。優先度は、データパケットの仲裁フィールドの全体数値を基礎とするものである。2つのデータパケットの伝送にコンフリクトが生じた場合、低い数値の仲裁フィールドを有するデータパケットに優先度がある。以下に記載するのは、メッセージタイプを指定するメッセージ識別(ID)コードを含む、使用してよいデータパケットタイプの数だけ存在する仲裁フィールドである。
【0048】
【表1】
【0049】
上の表は、メッセージタイプの優先度の最も高いもの(一番上)から優先度の最も低いものまでが表示されている。Aタイプのメッセージは、ネットワークデータバスに接続されている全装置に対してメインコントローラ20が制御メッセージを同報通信することに対応する。データフィールド“cccccccc cccccccc”は、メッセージタイプを設定するために使用される。Bタイプのメッセージは、エキステンダコントロールに対してメインコントローラ20がメッセ時を同報通信することに対応している。データフィールド“cccccccc cccccccc”は、メッセージのタイプを設定するために使用される。
【0050】
Cタイプのメッセージは警報または安全メッセージに対応し、データフィールド“aaaaaaaa”で警報タイプを設定し、データフィールド“ssssssss”で警報メッセージを生成した装置の論理アドレスを設定する。Dタイプのメッセージは、フローセンサなどの感知装置によって生成されるサーボメッセージに対応する。データフィールド“cccccccc”は、感知されたパラメータのタイプ、例えば流量、を設定し、データフィールド“ssssssss”は、感知パラメータを生成したセンサの論理アドレスを設定する。
【0051】
Eタイプのメッセージは、メッセージタイプを設定するデータフィールド“cccccccc cccccccc”と、メッセージの所期の宛先の論理アドレスを設定するデータフィールド“dddddddd”とを有する一般的なメッセージに対応する。Fタイプのメッセージは、メッセージタイプを設定するデータフィールド“cccccccc cccccccc”と、メッセージソースの論理アドレスを設定するデータフィールド“ssssssss”とを有する一般的なメッセージに対応する。
【0052】
Gタイプのメッセージは、メッセージタイプを設定するデータフィールド“cccccccc”と、メッセージの所期の宛先の物理アドレスを設定するデータフィールド“dddddddd dddddddd”とを有する一般的なメッセージに対応する。Hタイプのメッセージは、メッセージタイプを設定するデータフィールド“cccccccc”と、メッセージソースの物理アドレスを設定するデータフィールド“ssssssss ssssssss”とを有する一般的なメッセージに対応する。Iタイプのメッセージ(すべて論理“1”)は、ネットワークデータバスに接続された全装置に周期的に同報通信される、メインコントローラ20からのステータス要求に対応する。
【0053】
前述のメッセージタイプの中には、データフィールド無しで伝送されるものがある。例えば、メインコントローラ20からのステータス要求メッセージには、データフィールドが無い。他のメッセージはデータフィールドを有している。例えば、サーボメッセージ(上記Dタイプ)は、1分当たり0.257リットルという流量読取値など、感知された状態の数値を設定する特定するデータフィールドを備える。
【0054】
メインコントローラ20、エキステンダコントローラ32、およびアダプタポッド40は、CRCフィールドを介して受信されたメッセージの精度を確認し、正確に受信されていなかったメッセージの再送信を要求し、正確に受信されるメッセージを受信したことに応じて確認応答メッセージを伝送する、従来の電子機器回路を備えていてもよい。
【0055】
前述のメッセージは、ネットワーク30に接続された全装置に送信または同報通信されてもよい。ポッド40またはエキステンダコントローラ32などの装置のそれぞれは、同報通信される特定メッセージについてのみ、受信によって判別することができる。例えば、この判別は、受信装置と関係のある、受信装置以外の全装置の論理アドレスを記憶している、受信装置内のメッセージ判別メモリにアクセスすることによって実施されることが可能である。
【0056】
例えば、フローセンサ50aからのフィードバック信号受信に基づいて導管の血液流量を制御する血液ポンプ50cに接続されたアダプタポッド40cが受信装置である場合、ポッド40cのメッセージ判別メモリにフローセンサ50aの論理アドレスが含まれているので、ポッド40cは、フローセンサ50aに接続されているポッド40aが生成する任意のメッセージを受信できる。
【0057】
メッセージ判別メモリは、メインコントローラ20の論理アドレスを含んでいるが、他の複数のポッド40の論理アドレスを含むことも可能である。従って、ネットワーク30に同報通信されるメッセージは、特定の宛先アドレスを含む必要がない(ただし、宛先アドレスを含むこともできる)点に注意されたい。
【0058】
ポッド40およびエキステンダコントローラ32は、送り主のアイデンティティではなくメッセージタイプに基づいてメッセージを判別することもできる。例えば、ポッド40は、全部のステータス要求メッセージおよび構成メッセージ(以下に記載)を受信できる。そのようなメッセージのメッセージ識別コードもメッセージ判別メモリに記憶できる。
【0059】
医療処置で潅流システム10を使用する前であって、全部の潅流装置50を前述のように構成した後、ネットワーク30に接続されている全部のポッド40に、構成メッセージを含んだデータパケットが送信される。構成メッセージには、前述の必要構成データがすべて含まれている。例えば、血液ポンプの場合、構成データはポンプ操作モード、ポンプの所望流量などである。装置関連データ(例えば、血液ポンプがフィードバックを受信しなくてはならないセンサ)など、任意の構成メッセージをポッド40が受信すると、対応する装置の論理アドレスによってメッセージ判別メモリが更新される。
【0060】
ネットワークへのポッドの接続
ネットワークデータ/電力バス30を介してアダプタポッド40とメインコントローラ29とを通信させるには、アダプタポット40がネットワーク30に接続されることが許可されていなくてはらなない。この接続は、ネットワークに接続するアダプタポッド40がメインコントローラ20に送信する開始要求メッセージによって開始される。開始要求メッセージには、接続要求元のポッド40に接続される潅流装置50のタイプを識別する第1のコードと、接続要求元のポッド50の物理アドレス(図11のコード発生器144によって指定)を識別する第2のコードとが含まれる。
【0061】
図13Cは、アダプタポッド40から開始要求メッセージを受信したことに対応して、メインコントローラ20が実施する開始ルーチン280のフローチャートである。開始ルーチン280は、メインコントローラ20が開始要求メッセージを受信したことに応じて呼び出される中断サービスルーチンであってもよい。図13Cを参照すると、ステップ2828で、メインコントローラ20によって受信された開始メッセージがデコードされて、接続要求元のポッド40に取り付けられる潅流装置40のタイプを判断するとともに、ポッド40の物理アドレスを判断する。
【0062】
ステップ284で、要求元ポッド40にフルパワーが承認されているかどうか判断する。先述したように、潅流装置40を動かす電力は、ネットワーク30を介して電源118(図9)からポッド40に供給される。電源118から与えられる電力に制限がある場合があり、その場合、メインコントローラ20は、特定数の潅流装置50だけしかネットワーク30に接続できないようにプログラムされていてもよいし、あるいは、特定タイプの潅流装置50を特定数だけしか接続できないようにプログラムされていてもよい。例えば、血液ポンプなどの制御装置は一般に感知装置より多くの電力を使うので、ネットワーク30に接続できる制御装置の数の上限をメインコントローラ20に与えてもよい。
【0063】
ステップ284で、ネットワーク30に既に接続されている潅流装置50の数と接続可能な最大数とを比較して、追加装置50の接続によって最大値を越えてしまうかどうかを判断することによって、フルパワーを承認するか否か決定できる。あるいは、接続要求元の層値が制御装置の場合は、既に接続されている制御装置数と、接続可能な制御タイプ潅流装置の最大数と比較できる。フルパワー非承認と判断された場合は、プログラムはそのまま終了する。
【0064】
フルパワー承認と判断された場合、ステップ286〜298が実行され、開始許可メッセージが生成および転送され、それによって潅流装置50に対応するポッド40がネットワーク30に接続される。特にステップ286で、新たに接続されたポッド40に対して固有論理アドレスが割り当てられる。例えば、ネットワーク30の容量が装置16個である場合、論理アドレスは4ビットのバイナリコードであってもよい。ステップ288で、論理アドレスを含む開始許可メッセージがコード化され、ステップ290で開始許可メッセージがネットワーク30を通じて送信される。
【0065】
ステップ292で、開始要求元のポッド40が、メインコントローラ20に対してローカルである場合(すなわち、ネットワークエキステンダ22無しでメインコントローラに直接に接続されているポット40gまたは40hのいずれかである場合)、ポッド40へのフルパワーは、潅流装置50に接続されているローカルノードコントローラ(すなわち、図9のノードコントローラ34i〜34jのいずれか)を介して可能となる。図11において、上記はライン134にイネーブル信号を送信することによって実施され、それによってコントローラ140がスイッチ140、154、158を閉じるので、電力ライン120a、120bにフルパワーが供給され、アダプタポッド40がデータバス152に接続される。
【0066】
図13Cにおいて、ステップ292の判断によって潅流装置がローカルな装置でない場合、ステップ296に進んで、開始要求元のポッド40と協働するノードコントローラ34の物理アドレスを含む接続メッセージを、ネットワーク30を通して送信する。以下に説明するように、エキステンダコントローラ32は、接続メッセージを受信するとそのメッセージをデコードして物理アドレスを判断し、ノードコントローラ32に接続されたライン134にイネーブル信号を送信することによって、物理アドレスを有するノードコントローラ34に接続されたエキステンダコントローラ32(すなわち、要求ポッド40と協働するノードコントローラ34)をフルパワーにする。
【0067】
ステータス要求
潅流システム10の操作時、ネットワーク30に接続された全装置が、適正に機能し且つネットワーク30を通して同報通信メッセージを受信していることを確認するために、メインコントローラ20は周期的にステータス要求メッセージをネットワーク30上のすべてのエキステンダコントローラ32とアダプタポッド40とに送信する。エキステンダコントローラ32のそれぞれおよびアダプタポッド40は、所定時間内にステータス要求に応答しなくてはならない。この時間内にステータス要求に応答しないエキステンダコントローラ32およびポッド40はネットワークから切断され、それに対応する警報メッセージが視覚ディスプレイ114に生成され、そのような事態がオペレータに警告される。
【0068】
図13Dは、メインコントローラ20によって周期的に実施されるステータス要求ルーチン300のフローチャートである。図13Dにおいて、ステップ302でステータス要求メッセージがコード化され、ステップ304でネットワーク30に接続されている全部のエキステンダコントローラ32およびアダプタポッド40にメッセージが同報通信される。前述の通り、ステータス要求メッセージは、データパケットの仲裁でただ単にすべて論理“1”であってもよい。ステップ306で、全部のエキステンダコントローラ32およびポッド40がステータス要求メッセージに応答しなくてはならない所定のタイムアウト時間が開始する。
【0069】
ステータス要求メッセージを受信すると、エキステンダコントローラ32のそれぞれおよびアダプタポッド40は、その論理アドレスとステータスを利用してステータスメッセージをコード化し、その後、ネットワーク30を通してこの状態メッセージをメイコントローラ20に同報通院する。
【0070】
図13Eは、前にルーチン300によって送信されたステータス要求メッセージに応答して送られてきた状態メッセージを受信した時にメインコントローラ20が実施する、ステータス受信ルーチン310のフローチャートである。図13Eを参照すると、ステップ312で、応答元のエキステンダコントローラ32またはアダプタポッド40の論理アドレスがステータスメッセージから判断され、ステップ314で、メッセージから装置32または40の状態が判断される。ステータスは、数多くの種々のバイナリのステータスコードで指定されてもよい。ステップ316で、装置32または40のステータスに問題がなければ、そのままプログラム終了となる。しかしながら、ステータスに問題がある場合、ステップ318に進んで、ステータスコードによって識別されるステータス状態に応答する。状態がさほど重大でなければ、メインコントローラ20は還流システム10の視覚ディスプレイ114に警告を表示するだけでよい。状態がかなり重大である場合、メインコントローラ20は、ネットワーク30から装置32または40を切断してもよい。
【0071】
図13Fは、エキステンダコントローラまたはアダプタポッド40をネットワーク30から切断させる切断ルーチン330のフローチャートである。切断ルーチン330は、1)装置32または40が前述のタイムアウト時間内にメインコントローラ20にステータスメッセージを送信しなかった場合、または2)図13Eのステップ318の判定により装置32または40の重大な動作異常の場合に応答して、メインコントローラ20によって実行される。
【0072】
図13Fにおいて、ステップ332で、切断対象の装置32または40がメインコントローラ20にとってローカルである場合、ステップ334に進んで、装置32または40を、装置32または40に接続されたメインコントローラ20内のノードコントローラ34g、34h、34iまたは34jによって切断する。図11に参照すると、切断は、ディスエーブル信号をライン134に送信することによってコントローラ140がスイッチ150、154、158を開いてデータバス152および電力ライン120a、120bが切断されることによって行われる。
【0073】
ステップ332で、切断対象装置がメインコントローラ20にとってローカルでない場合、ステップ336に進んで、切断対象装置32または40のノードコントローラ34の物理アドレスを含む切断メッセージをコード化し、その後、ステップ338に進んで、ネットワーク30を通して切断メッセージを送信する。
【0074】
切断対象装置が、ノードコントローラ34を介してエキステンダコントローラ32に接続されたポッド40である場合、エキステンダコントローラ32が切断メッセージを受信すると、エキステンダコントローラ32はメッセージをデコードして切断対象のポッドの物理アドレスを判断し、そのポッド40と協働するノードコントローラ34は、ノードコントローラ34に接続されたライン134にディスエーブル信号を送ることによってポッド40を切断する。
【0075】
メインコントローラに入力されるオペレータコマンド
医療処置に際して潅流システム10を操作しているとき、メインコントローラ20はシステムのオペレータが入力する種々のコマンドなどの入力に応答している。図13Gは、これら入力にどのようにメインコントローラ20が応答するかを示す制御コマンドルーチン350のフローチャートである。図13Gには種々の可能オペレータ入力が開示されているが、メインコントローラ20は、それ以外の他のオペレータ入力にも対応可能であることを理解されたい。
【0076】
図13Gを参照すると、ステップ352で、オペレータによる入力が制御コマンドであった場合、ステップ354に進んで、制御コマンドに対応する制御メッセージをデータパケットにコード化し、その後、ステップ356に進んで、ネットワーク30を通して制御メッセージを同報通信する。例えば、制御メッセージは、1)特定感知装置の新警報限界、2)血液ポンプの新動作モード、3)血液ポンプの新目標流量値、4)特定感知装置の新読取速度、5)ポンプ開始コマンド、6)ポンプ停止コマンド、のいずれかであることが可能である。
【0077】
ステップ358で、オペレータが特定警報のリセットを要求した場合は、ステップ360に進んで、警報を発生した装置の論理アドレスを含んでいる対応警報リセットメッセージをコード化し、ステップ362に進んで、ネットワーク30を通して警報リセットメッセージを同報通信する。ステップ364で、潅流システム10のリセットをオペレータが要求した場合は、ステップ366に進んで、対応システムリセットメッセージをコード化し、ステップ362に進んで、システムリセットメッセージをネットワーク30を通して同報通信する。
【0078】
メインコントローラによるネットワークメッセージの受信
動作時、メインコントローラ20は、ネットワーク30を通して同報通信される種々タイプのメッセージを受信する。図13Hは、メインコントローラ20が実行する受信ルーチン370のフローチャートであり、種々タイプのメッセージの受信に応じてメインコントローラ20が取る行動を説明するものである。
【0079】
図13Hを参照すると、ステップ372で、受信メッセージが警報または他の事象などの事象メッセージに対応している場合、ステップ374に進んで、表示装置114に表示される可視表示が更新され事象をオペレータに知らせ、そしてステップ376に進んで、メインコントローラ20のメモリ104に記憶される事象ログにこの事象を記録する。
【0080】
ステップ374で、受信メッセージが、フローセンサの出力を表わす数値を含むメッセージなどのデータメッセージに対応している場合は、ステップ380に進んで可視表示を更新され、そしてステップ382に進んで、データおよびこのデータを生成した装置を、メインコントローラ20のメモリ104に記憶されているデータログに記録する。
【0081】
ステップ384で、受信メッセージがステータスメッセージであった場合、ステップ386に進んで、図13Eを参照して先述したようにステータスメッセージを処理し、ステップ390で、メモリに記憶されているステータスログにステータスを記憶する。ステップ392で、受信メッセージが開始要求であった場合、ステップ394に進んで、図13Cを参照して先述したように開始要求を処理し、ステップ396で視覚表示を更新する。
【0082】
エキステンダコントローラの動作
エキステンダコントローラ32の基本機能は、ネットワーク30に対するアダプタポッド40の接続および切断を制御することである。図15Aは、それぞれのエキステンダコントローラ32のコントローラ130が実施する開始ルーチンのフローチャートである。図15Aを参照すると、ステップ422で、エキステンダコントローラ32は、内部RAMおよび内部ROMのテストなど多数の内部自己テストを実施する。ステップ424で、テストが正常終了した場合、ステップ426に進んで、ネットワークバス30にメッセージを送信し、同時に、実際にそのメッセージが送信されたか判断するために送信されたメッセージを、ネットワークバス30から受信することによって、ネットワークバス30へのエキステンダコントローラ32の接続を試験する。
【0083】
ステップ428で、データバステストが正常終了した場合、ステップ320に進んで、エキステンダコントローラ32が、ライン133を介してその親ノードコントローラ34にチェックインコードを周期的に転送することを開始する。以下に説明するように、装置(アダプタポッド40またはエキステンダコントローラ32)のそれぞれは、その親ノードコントローラ34に対して周期的にチェックインコードを送信して、ネットワーク30への接続を維持しなくてはならない。
【0084】
ステップ432で、エキステンダコントローラ32は、その親ノードコントローラ34からその物理アドレスが送信されてくるのを待機する。ステップ434で、ステップ422および426で行われたテストのいずれかが不合格だった場合、ネットワーク30を通してエラーメッセージが同報通信される。エラーメッセージには、エキステンダコントローラ32の物理アドレスと、どのテストに通らなかったかを示すバイナリコードとが含まれている。
【0085】
全部のテストに合格した場合、ステップ438に進んで、エキステンダコントローラ32の物理アドレスを含む開始要求メッセージをコード化してネットワーク30を通して同報通信する。ステップ440で、メインコントローラの開始承認メッセージを受信するまで待機し、次にステップ442で、その親ノードコントローラ34の電力ライン120a、120bを介してエキステンダコントローラ32にフルパワーを供給することが承認されるのを待機する。承認されると、ステップ444に進み、エキステンダコントローラ32が電力ライン120aおよび120bの電圧および電流を測定して、それらが指定範囲内であることを確認する。ステップ446で、電力測定値が指定範囲外の場合、ステップ436に進んで、この結果に対するメッセージをネットワーク30を通じてメインコントローラ20に同報通信する。
【0086】
図15Bは、エキステンダコントローラ32がメインコントローラ20から接続メッセージを受信したときにエキステンダコントローラ32が実行する接続ルーチン450のフローチャートである。図15Bを参照すると、ステップ452で、メインコントローラ20から受信した接続メッセージがデコードされ、ネットワーク30に接続するアダプタポッド40の物理アドレスが判断される。ステップ454で、物理アドレスが確認され、接続されるアダプタポッド40が、エキステンダコントローラ32にとってローカルであるかどうか判断される、これは、アダプタポッド40が、エキステンダコントローラ32に接続されている3つのうちの1つであることを意味する。ポッド40がエキステンダコントローラ32にとってローカルでない場合、それ以上の動作は行われず、ルーチン450は終了する。ポッド40がエキステンダコントローラ32にとってローカルである場合、ステップ456に進み、いずれかのライン134を介して、接続しようとするアダプタポッド40と協働するノードコントローラ34にイネーブル信号を送信し、それによってアダプタポッド40を前述のようにネットワーク30に対して接続状態にする。
【0087】
エキステンダコントローラ32がメインコントローラ20からの切断メッセージを受信すると、図15C記載の切断ルーチン460がエキステンダコントローラ32によって実行される。図15Cを参照すると、ステップ462で、メインコントローラ20から受信された切断メッセージをデコードして、ネットワーク30から切断されるアダプタポッド40の物理アドレスを判断する。ステップ464で、物理アドレスを確認して、切断対象のアダプタポッド40がエキステンダコントローラ32にとってローカルであるかどうか判断する。ポッド40がローカルでない場合、それ以上の動作は行われない。ポッド40がローカルである場合、ステップ466に進み、いずれかのライン134を介して、切断しようとするアダプタポッド40と協働するノードコントローラ34にディスネーブル信号を送信し、それによってアダプタポッド40を前述のようにネットワーク30に対して切断状態にする。
【0088】
ノードコントローラの動作
ノードコントローラ34の基本機能は、ネットワーク30に対してアダプタポッド40(ノードコントローラ34がアダプタポッド40の親である場合)およびエキステンダコントローラ32(ノードコントローラ34がキステンダコントローラ32の親である場合)を接続および切断することである。接続または切断は、前述のように、メインコントローラ20から、または、ノードコントローラ34と協働するエキステンダコントローラ32から受信されるイネーブルまたはディスエーブル信号に基づいて実施される。また、ノードコントローラ34のそれぞれは、対応装置32または40が周期的にチェックインを行うことを要求する。装置32または40が適切なチェックインコードでチェックインを行わなかった場合、ノードコントローラ34はネットワーク30から装置32または40を切断する。
【0089】
図16Aは、ノードコントローラ34のそれぞれが実行するノードルーチン470のフローチャートである。ルーチン470は、対応装置32または40が出力したチェックインコードをノードコントローラ34が受信したときに実行される。図16Aを参照すると、ステップ472で、装置32または40から受信したコードが有効でなかった場合、それ以上の動作は行われずルーチンは終了する。チェックインコードは、ノードコントローラ34のコード発生器144(図11)によって指定される物理アドレスであってもよい。コードが有効かどうか判断するために、ノードコントローラ34は、受信コードを所定コードと一致するか比較して判断してもよい。
【0090】
チェックインコードが有効だった場合、ステップ474に進み、タイムアウトタイマーを再スタートする。タイムアウトタイマーは、装置32または40が有効チェックインコードを送信しなくてはならない所定時間を把握する。ステップ476で、ノードコントローラ34は、コード発生器144が生成した物理アドレスを、ポッド40に送信する。ステップ478で、ノードコントローラ34は、スイッチ150に信号を送ってスイッチ150を閉じさせることによって(または、既に閉じている場合は閉じた状態を維持することによって)、装置32または40をデータバス152(図11)に接続する。
【0091】
ステップ480で、ノードコントローラ34に接続されたライン134にイネーブル信号が存在する場合、ノードコントローラ34は、スイッチ154、158(図11)に信号を送信することによって装置32または40にフルパワーを供給し、スイッチ154、158を閉じさせる(または、既に閉じている場合は閉じた状態を維持させる)。
【0092】
ステップ480の判断によりイネーブル信号が存在しなかった場合、ステップ484に進んで、スイッチ150を開くことによってデータバス152から装置32または40を切断し、ステップ484に進んで、スイッチ154、158を開くことによって電力ライン120a、120bから装置32または40を切断する。
【0093】
装置32または40が、タイムアウト時間内にノードコントローラ34に有効チェックインコードを送信しなかった場合、ノードコントローラ34は図16Bに示したタイムアウトルーチンを実行する。図16Bを参照すると、ステップ492で、スイッチ150を開くことによってデータバス152から装置32または40を切断し、ステップ494で、スイッチ154、148を開くことによって電力ライン120a、12bから装置32または34を切断する。
【0094】
アダプタポッドの動作
アダプタポッド40は、メインコントローラ20によって送信された構成および制御メッセージの受信、流量などの感知された状態の数値を含む感知メッセージの受信、および/またはネットワーク30による感知メッセージの送信など、数多くの機能を実施する。以下にこれらの機能を説明する。
【0095】
図17Aは、それぞれのアダプタポッド40のコントローラ180が実行する開始ルーチン520のフローチャートである。図17Aを参照すると、ステップ522で、アダプタポッド40が、内部RAMおよび内部ROMのテストなど数多くの内部自己テストを実行する。ステップ524でテストが正常終了すると、ステップ526に進んで、データバス152にメッセージを送信すると同時に、メッセージが確かに送信されたかを判断するために送信されたメッセージをデータバス152から受信することによって、ポッド40とデータバス152との接続を試験する。
【0096】
ステップ528でデータバステストが正常終了すると、ステップ530に進んで、アダプタポッドがライン133を介してその親ノードコントローラ34に周期的にチェックインコードを送信しはじめる。ステップ532で、ポッド40は、その親ノードコントローラ34からその物理アドレスが送信されてくるのを待機する。ステップ534で、ステップ522および526で実施したテストのいずれかに合格しなかった場合、ネットワーク30を介してエラーメッセージを同報通信する。エラーメッセージには、ポッド40の物理アドレスと、合格しなかったテストを特定するバイナリコードとが含まれる。
【0097】
全試験に合格だった場合、ステップ538に進んで、アダプタポッド40の物理アドレスを含む開始要求メッセージをコード化してネットワーク30を通じて同報通信する。ステップ540で、メインコントローラ20から開始承認メッセージが出力されるまで待機し、その後、ステップ542で、その親ノードコントローラ34の電力ライン120a、120bを介してアダプタポッド40にフルパワーが承認されるのを待機する。フルパワーが承認されると、ステップ544に進み、ポッド40が電力ライン120a、120bの電圧と電流を測定し、それらが指定範囲内であるか確認する。ステップ546で電力測定値が指定範囲内にない場合、ステップ536に進んで、その結果に対するメッセージをネットワーク30を通してメインコントローラに同報通信する。
【0098】
動作時、アダプタポッド40はネットワークを通してメインコントローラ20から制御または構成メッセージを受信してもよい。図17Bは、アダプタポッド40がメッセージを受信するときに実行される受信ルーチン550のフローチャートである。図17Bを参照すると、ステップ552で、メッセージがデコードして、メッセージに埋め込まれた制御コマンドを判断し、ステップ554で、ポッド40に接続された潅流装置50に制御信号を(図12の1つ以上のデータライン192を介して)送信する。
【0099】
動作時、アダプタポッド40はいずれかのデータライン192を介して潅流装置50から警報信号を受信してもよい。そのような警報信号を受信すると、ポッド40は図17C記載の警報ルーチン560を実行する。図17Cを参照すると、ステップ562で、警報および警報タイプを生成する潅流装置40の論理アドレスとともに警報メッセージをコード化し、ステップ564で、ネットワーク30を通してメインコントローラ20に警報メッセージを同報通信する。
【0100】
動作時、フローセンサなど、感知信号を発生する潅流装置50に接続されているアダプタポッド40は、いずれかのライン152を介して感知信号の数値を周期的に読み取る。感知信号の連続読取の間隔は、前述の構成工程のときに指定してもよい。図17Dは、感知信号の値を読み取る時間になったときに実行される感知ルーチン570のフローチャートである。図17Dを参照すると、ステップ572で、いずれかのデータライン152を介して感知信号を読み取る。ステップ574で、感知信号の数値を、感知信号発生元の潅流装置40の論理アドレスとともに、メッセージにコード化する。次に、ステップ476で、メッセージを、ネットワーク30に接続されている全装置にネットワーク30を通して同報通信する。
【0101】
前述のように、ネットワーク30に接続されたアダプタポッド40のそれぞれには、ネットワーク30に接続された装置サブセットだけからのメッセージを選択受信するために使用されるメッセージ判別回路が設けられていてもよい。ステップ576で感知メッセージが同報通信されるときにメッセージを受信する装置は、メインコントローラ20(ネットワーク30を通して同報通信される全メッセージを受信してもよい)、および、感知メッセージにコード化された感知信号の値に基づいて制御される特定潅流装置50だけである。
【0102】
アダプタポッドは前述以外の機能を備えてもよいことを理解されたい。また、メインコントローラ20に設けられた単一電源からネットワークに電力を配電する代わりに、電力を、複数の電源、例えば、ネットワークエキステンダのそれぞれに1つずつ設けた電源から配電することも可能である。
【0103】
以上、前述の説明に鑑みて、本発明の数多くの変更態様および代替実施態様が当業者に明らかになるであろうが、上記説明は説明のためだけのものと解釈されるべきものであり、当業者に本発明を実施するベストモードを教示するためのものである。構造詳細は、実質的に本発明の精神を逸脱せずに変更されてもよく、添付クレームの適用範囲内にある全ての変更態様の排他的利用が確保されるものである。
【図面の簡単な説明】
【0104】
【図1】本発明による潅流システムの好適実施態様のブロック図である。
【図2】図1に模式的に示したメインコントローラの斜視図である。
【図3】図1に模式的に示した1つのネットワークエキステンダの斜視図である。
【図4】図1に模式的に示した1つのアダプタポッドの斜視図である。
【図5】複数のコネクタ構成の図である。
【図6】複数のコネクタ構成の図である。
【図7】複数のコネクタ構成の図である。
【図8】図1に模式的に示したメインコントローラの斜視図で、2つのネットワークエキステンダと、8つのアダプタポッドが差し込まれている。
【図9】図1に模式的に示したメインコントローラのブロック図である。
【図10】図1に模式的に示した1つのエクステンダコントローラのブロック図である。
【図11】図1に模式的に示した1つのノードコントローラのブロック図である。
【図12】図1に模式的に示した1つのアダプタポッドのブロック図である。
【図13A】図1記載のメインコントローラの動作を示すフローチャートである。
【図13B】図1記載のメインコントローラの動作を示すフローチャートである。
【図13C】図1記載のメインコントローラの動作を示すフローチャートである。
【図13D】図1記載のメインコントローラの動作を示すフローチャートである。
【図13E】図1記載のメインコントローラの動作を示すフローチャートである。
【図13F】図1記載のメインコントローラの動作を示すフローチャートである。
【図13G】図1記載のメインコントローラの動作を示すフローチャートである。
【図13H】図1記載のメインコントローラの動作を示すフローチャートである。
【図14A】潅流システムの動作時に、図9の表示装置に生成される一組の潅流回路画像の表示例である。
【図14B】潅流システムの動作時に、図9の表示装置に生成される一組の潅流回路画像の表示例である。
【図15A】図1記載のエキステンダコントローラの動作を示すフローチャートである。
【図15B】図1記載のエキステンダコントローラの動作を示すフローチャートである。
【図15C】図1記載のエキステンダコントローラの動作を示すフローチャートである。
【図16A】図1記載のノードコントローラの動作を示すフローチャートである。
【図16B】図1記載のノードコントローラの動作を示すフローチャートである。
【図17A】図1記載のアダプタポッドの動作を示すフローチャートである。
【図17B】図1記載のアダプタポッドの動作を示すフローチャートである。
【図17C】図1記載のアダプタポッドの動作を示すフローチャートである。
【図17D】図1記載のアダプタポッドの動作を示すフローチャートである。
【符号の説明】
【0105】
20 メインコントローラ
32a、32b エキステンダコントローラ
34a、34b、34c、34d、34e、34f ノードコントローラ
40a、40b、40c、40d、40e、40f、40g ポッド
50a フローセンサ
50b エアセンサ
50c ポンプ
50d 圧力センサ
50e 温度センサ
50f オクルダー
50g ポンプ
50h レベルセンサ
【特許請求の範囲】
【請求項1】
患者の治療に関連して使用する医療潅流システムであって、
患者に連結された流体導管を介して血液を圧送するようにした血液ポンプを備える第1のタイプの潅流装置と、
状態を感知して該状態に関連する感知信号を発生するようにした第2のタイプの潅流装置と、
電力ラインを有する電力ネットワークと、
前記潅流装置を前記電力ネットワークに選択的に接続する手段と、
前記潅流装置に作用的に結合され、前記潅流装置に関連する制御コマンドをオペレータから受信する入力装置を有するコントローラと、を備える医療潅流システム。
【請求項2】
患者の治療に関連して使用する医療潅流システムであって、
患者に連結された流体導管を介して血液を圧送するようにした血液ポンプを備える第1のタイプの潅流装置と、
状態を感知して前記状態に関連する感知信号を発生するようにした第2のタイプの潅流装置と、
それぞれ前記潅流装置のうちの1つに作用的に結合されている複数のデータ通信ラインを有するデータ通信ネットワークと、前記潅流装置のそれぞれに作用的に結合した電力ラインを有する電力ネットワークとを備える、前記潅流装置を作用的に相互接続するネットワークと、
前記潅流装置を前記電力ネットワークに選択的に接続する手段と、
前記データ通信ネットワークを通して、メッセージをデジタルデータパケットの形態で前記潅流装置間で送信する手段と、
前記データ通信ネットワークを介して前記潅流装置に作用的に結合され、前記潅流装置に関連する制御コマンドをオペレータから受信する入力装置を有するコントローラと、を備える医療潅流システム。
【請求項3】
前記メッセージ送信手段が、
前記ポンプ用の制御コマンドを含むメッセージを生成する手段と、
前記状態に関するデータを含むメッセージを生成する手段と、
を備える請求項2に記載のシステム。
【請求項4】
前記選択的結合手段が、
比較的低レベルの電流を供給する手段と、
比較的高レベルの電流を供給する手段と、
前記比較的低レベルの電流または前記比較的高レベルの電流の一方を選択的に供給する手段と、
を備える請求項1〜3のいずれか一項に記載のシステム。
【請求項5】
前記選択的結合手段が、
電力入力と、
電力出力と、
前記電力入力と前記電力出力との間に結合されるスイッチと、
前記電力入力と前記電力出力との間に結合される抵抗手段と、
を備える請求項1〜3のいずれか一項に記載のシステム。
【請求項6】
前記抵抗手段が、前記スイッチと並列に接続した抵抗を備える請求項5に記載のシステム。
【請求項7】
患者の治療に関連して使用する医療潅流システムであって、
第1の状態を感知して前記第1の状態に関連する第1の感知信号を発生する第1の潅流装置と、
第2の状態を感知して前記第2の状態に関連する第2の感知信号を発生する第2の潅流装置と、
前記感知信号のうちの1つのみに基づいて物理的動作を制御する制御装置を備える第3の潅流装置と、
前記物理動作を制御する前記制御装置に、前記感知信号のうちのどれを供給するかを指定する手段と、
前記潅流装置に作用的に結合され、前記潅流装置に関連する制御コマンドをオペレータから受信する入力装置を有するコントローラとを備える医療潅流システム。
【請求項8】
前記第1の潅流装置がフローセンサを備え、前記第3の潅流装置がポンプを備える請求項7に記載のシステム。
【請求項9】
前記第3の潅流装置がポンプを備え、前記物理的動作が導管を介した液体の圧送を備える請求項7または8に記載のシステム。
【請求項10】
前記指定手段が、メモリ内に記憶されたメッセージ判別データを備える請求項7〜9のいずれか一項に記載のシステム。
【請求項11】
それぞれ前記潅流装置のそれぞれに作用的に結合されている複数のデータ通信ラインを有するデータ通信ネットワークを備え、前記潅流装置を作用的に相互接続するネットワークと、
前記データ通信ネットワークを通して、メッセージをデジタルデータパケットの形態で前記潅流装置間で送信する手段と、
を更に備える請求項7〜10のいずれか一項に記載のシステム。
【請求項12】
前記メッセージが、前記感知信号のうちの1つに関連する感知メッセージと、前記感知信号のうちの1つと無関係な非感知メッセージとを含み、
前記指定手段が、
メモリに記憶されているメッセージ判別データと、
前記制御装置に送信された前記感知メッセージのうちの1つの一部を、前記メモリに記憶されている前記メッセージ判別データと比較する手段とを含む、請求項11に記載のシステム。
【請求項13】
前記比較手段がコントローラを備える請求項12に記載のシステム。
【請求項14】
前記メッセージが、前記感知信号のうちの1つに関連する感知メッセージと、前記感知信号のうちの1つとは無関係な非感知メッセージとを含み、前記潅流システムが、前記感知メッセージに第1の優先度を割当て、前記第1の優先度よりも低い第2の優先度を前記非感知メッセージに割り当てる手段を更に備える、請求項11記載のシステム。
【請求項1】
患者の治療に関連して使用する医療潅流システムであって、
患者に連結された流体導管を介して血液を圧送するようにした血液ポンプを備える第1のタイプの潅流装置と、
状態を感知して該状態に関連する感知信号を発生するようにした第2のタイプの潅流装置と、
電力ラインを有する電力ネットワークと、
前記潅流装置を前記電力ネットワークに選択的に接続する手段と、
前記潅流装置に作用的に結合され、前記潅流装置に関連する制御コマンドをオペレータから受信する入力装置を有するコントローラと、を備える医療潅流システム。
【請求項2】
患者の治療に関連して使用する医療潅流システムであって、
患者に連結された流体導管を介して血液を圧送するようにした血液ポンプを備える第1のタイプの潅流装置と、
状態を感知して前記状態に関連する感知信号を発生するようにした第2のタイプの潅流装置と、
それぞれ前記潅流装置のうちの1つに作用的に結合されている複数のデータ通信ラインを有するデータ通信ネットワークと、前記潅流装置のそれぞれに作用的に結合した電力ラインを有する電力ネットワークとを備える、前記潅流装置を作用的に相互接続するネットワークと、
前記潅流装置を前記電力ネットワークに選択的に接続する手段と、
前記データ通信ネットワークを通して、メッセージをデジタルデータパケットの形態で前記潅流装置間で送信する手段と、
前記データ通信ネットワークを介して前記潅流装置に作用的に結合され、前記潅流装置に関連する制御コマンドをオペレータから受信する入力装置を有するコントローラと、を備える医療潅流システム。
【請求項3】
前記メッセージ送信手段が、
前記ポンプ用の制御コマンドを含むメッセージを生成する手段と、
前記状態に関するデータを含むメッセージを生成する手段と、
を備える請求項2に記載のシステム。
【請求項4】
前記選択的結合手段が、
比較的低レベルの電流を供給する手段と、
比較的高レベルの電流を供給する手段と、
前記比較的低レベルの電流または前記比較的高レベルの電流の一方を選択的に供給する手段と、
を備える請求項1〜3のいずれか一項に記載のシステム。
【請求項5】
前記選択的結合手段が、
電力入力と、
電力出力と、
前記電力入力と前記電力出力との間に結合されるスイッチと、
前記電力入力と前記電力出力との間に結合される抵抗手段と、
を備える請求項1〜3のいずれか一項に記載のシステム。
【請求項6】
前記抵抗手段が、前記スイッチと並列に接続した抵抗を備える請求項5に記載のシステム。
【請求項7】
患者の治療に関連して使用する医療潅流システムであって、
第1の状態を感知して前記第1の状態に関連する第1の感知信号を発生する第1の潅流装置と、
第2の状態を感知して前記第2の状態に関連する第2の感知信号を発生する第2の潅流装置と、
前記感知信号のうちの1つのみに基づいて物理的動作を制御する制御装置を備える第3の潅流装置と、
前記物理動作を制御する前記制御装置に、前記感知信号のうちのどれを供給するかを指定する手段と、
前記潅流装置に作用的に結合され、前記潅流装置に関連する制御コマンドをオペレータから受信する入力装置を有するコントローラとを備える医療潅流システム。
【請求項8】
前記第1の潅流装置がフローセンサを備え、前記第3の潅流装置がポンプを備える請求項7に記載のシステム。
【請求項9】
前記第3の潅流装置がポンプを備え、前記物理的動作が導管を介した液体の圧送を備える請求項7または8に記載のシステム。
【請求項10】
前記指定手段が、メモリ内に記憶されたメッセージ判別データを備える請求項7〜9のいずれか一項に記載のシステム。
【請求項11】
それぞれ前記潅流装置のそれぞれに作用的に結合されている複数のデータ通信ラインを有するデータ通信ネットワークを備え、前記潅流装置を作用的に相互接続するネットワークと、
前記データ通信ネットワークを通して、メッセージをデジタルデータパケットの形態で前記潅流装置間で送信する手段と、
を更に備える請求項7〜10のいずれか一項に記載のシステム。
【請求項12】
前記メッセージが、前記感知信号のうちの1つに関連する感知メッセージと、前記感知信号のうちの1つと無関係な非感知メッセージとを含み、
前記指定手段が、
メモリに記憶されているメッセージ判別データと、
前記制御装置に送信された前記感知メッセージのうちの1つの一部を、前記メモリに記憶されている前記メッセージ判別データと比較する手段とを含む、請求項11に記載のシステム。
【請求項13】
前記比較手段がコントローラを備える請求項12に記載のシステム。
【請求項14】
前記メッセージが、前記感知信号のうちの1つに関連する感知メッセージと、前記感知信号のうちの1つとは無関係な非感知メッセージとを含み、前記潅流システムが、前記感知メッセージに第1の優先度を割当て、前記第1の優先度よりも低い第2の優先度を前記非感知メッセージに割り当てる手段を更に備える、請求項11記載のシステム。
【図1】


【図2】

【図3】

【図4】

【図5】

【図6】

【図7】

【図8】

【図9】

【図10】

【図11】

【図12】

【図13A】

【図13B】

【図13C】

【図13D】

【図13E】

【図13F】

【図13G】

【図13H】

【図14A】

【図14B】

【図15A】

【図15B】

【図15C】

【図16A】

【図16B】

【図17A】

【図17B】

【図17C】

【図17D】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13A】
【図13B】
【図13C】
【図13D】
【図13E】
【図13F】
【図13G】
【図13H】
【図14A】
【図14B】
【図15A】
【図15B】
【図15C】
【図16A】
【図16B】
【図17A】
【図17B】
【図17C】
【図17D】
【公開番号】特開2007−244885(P2007−244885A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2007−108619(P2007−108619)
【出願日】平成19年4月17日(2007.4.17)
【分割の表示】特願平10−516517の分割
【原出願日】平成9年8月5日(1997.8.5)
【出願人】(500204326)テルモ カーディオバスキュラー システムズ コーポレイション (7)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成19年4月17日(2007.4.17)
【分割の表示】特願平10−516517の分割
【原出願日】平成9年8月5日(1997.8.5)
【出願人】(500204326)テルモ カーディオバスキュラー システムズ コーポレイション (7)
【Fターム(参考)】
[ Back to top ]