
撓み板波センサ
【課題】撓み板中に誘起される固有モードの数が少ない撓み板波センサーを提供する。
【解決手段】撓み板波センサー70は、長さと幅とを有する撓み板72と、撓み板72中に励起される固有モードの数が少なくなるように撓み板72の全長に亘り配置された駆動歯76を有する撓み板72上の櫛パターン74を備え、その櫛パターン74によりセンサ70の操作及び設計を簡単化する。このセンサ70には、撓み板74の全長に亘り駆動歯76と交互配置(挟み込み配置)された感知歯78を含めることができる。一例においては、感知歯78を一方向に向け、駆動歯79を反対方向に向ける。
【解決手段】撓み板波センサー70は、長さと幅とを有する撓み板72と、撓み板72中に励起される固有モードの数が少なくなるように撓み板72の全長に亘り配置された駆動歯76を有する撓み板72上の櫛パターン74を備え、その櫛パターン74によりセンサ70の操作及び設計を簡単化する。このセンサ70には、撓み板74の全長に亘り駆動歯76と交互配置(挟み込み配置)された感知歯78を含めることができる。一例においては、感知歯78を一方向に向け、駆動歯79を反対方向に向ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に撓み板波センサ(flexural plate wave (FPW) sensor)に関し、とくに撓み板波センサ用の改良された櫛パターンに関する。
本出願は「撓み板波センサ」と題する2003年9月30日出願の米国特許願第10/675,398号に基づく優先権を主張する。
【背景技術】
【0002】
FPWセンサは撓み板(可撓性板又はダイヤフラム)を有し、その撓み板の形状とその撓み板上に設けた櫛パターンとで定まる複数の周波数において発振するように駆動される。撓み板上に設けた櫛パターンが電界を創り出し、その電界が撓み板の圧電特性との協働により運動を励起する。複数の固有モード(eigenmodes)が、空間的に分布したピーク群を表示するようなダイヤフラム変位(diaphragm displacements)を示す。各固有モードは、ダイヤフラムの長さに沿ったn個の半サイン周期(half sine periods)からなる。典型的なFPWセンサは、80以上の固有モードに対して励起され得る。典型的なFPWセンサにおいては、板の歪みが多数のシヌソイド的(sinusoidal)(又はシヌソイド近似的)なピークからなる。
【0003】
従来の典型的なFPWセンサは、撓み板の一端に駆動櫛の群を有し、その他端に感知櫛の群を有する。これらの従来装置における駆動櫛の群は、典型的には板の全長の僅か25%〜40%を占めるに過ぎない。固有モードのピークの数に比して駆動櫛の歯数が少ない場合は、それら少数の駆動歯を数個の固有モードと位置揃えすることができる。しかしその結果として、単に固有モードのピークが被励起櫛歯と完全に位置揃えされるだけでなく、(ピーク以外の)他の固有モードまでもが励起されてしまう。信号処理及びスペクトル分析では、この効果は洩れ(leakage)として知られている。従来の設計の重大な欠点は、FPWセンサにおける被励起櫛歯数の増大が共振振幅の類似した複数ピークの列を発生させ、それが従来の波センサの設計及び操作上の問題の複雑性を高めていることにある。
【0004】
更に従来のFPWセンサは、撓み板の対向端縁における駆動櫛の群と感知櫛の群とを利用すると共に、表面弾性波又は表面音波(SAW、surface acoustic waves)の類似・類推に基づく解析に依存している。この解析では、波が駆動櫛から出て感知櫛へ向けて伝播するとし、反射波の戻りを干渉とみなしている。この解析の明白な欠点は、SAW理論では計算上生じる低い値の利得(例えば類似振幅のピーク群)の原因となるセンサ出力中の小ピーク群を説明しないこと、及びピーク群に付随して見られる鋭い位相低下群(phase drops、例えば不規則位相)を説明しないことにある。
【0005】
【非特許文献1】ワインベルグ等(Weinberg et al)「撓み板波装置のモデル化(Modeling Flexural Plate Wave Devices)」Journalof Microelectro Mechanical Systems、Vol.9、2000年9月
【非特許文献2】ジェイ・ブレヴァンス(J. Blevins)「Formulas for Natural Frequency and Mode Shape」フロリダ州マラバルのRobert E. Krieger Publishing Co.、1979年
【発明の開示】
【発明が解決しようとする課題】
【0006】
従って本発明の目的は、改良された撓み板波センサを提供することにある。
【0007】
本発明の他の目的は、撓み板の中に励起される固有モードの数を少なくした撓み板波センサを提供することにある。
【0008】
また本発明の他の目的は、単一の強いピーク又は他のピークに比し著しく大きい1つのピークを発生する撓み板波センサを提供することにある。
【0009】
本発明の更なる目的は、位相が明確な出力を発生する撓み板波センサを提供することにある。
【0010】
また本発明の更なる目的は、設計及び操作が簡単な撓み板波センサを提供することにある。
【0011】
本発明の更に他の目的は、安定性及び性能を改善できる撓み板波センサを提供することにある。
【0012】
本発明が更に目的とすることは、他の固有モードから飛び出すモードに起因する干渉に基づく読み誤りの除去により安定性を改善した撓み板波センサを提供することにある。
【課題を解決するための手段】
【0013】
本発明は、撓み板上にその全長に亘り配置された駆動歯付き櫛パターンを設けることにより、撓み板中に励起される固有モードの数を減らすことができ、位相が明確で且つ単一の強いピークを出力させて撓み板波センサの操作及び設計の簡単化に寄与することができ、真に効果的で頑丈な撓み板波センサが達成できるとの知見に基づくものである。一実施例において、撓み板上の駆動歯を撓み板の全ての固有モードのピークと位置揃えする。
【0014】
本発明の撓み板波センサの一態様は、長さと幅とを有する撓み板、及びその撓み板中に励起される固有モードの数が少なくなるように撓み板の全長に亘り配置された駆動歯を有する撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。このセンサには、撓み板の全長に亘り駆動歯と交互配置(挟み込み配置)された感知歯を含めることができる。一例においては、感知歯を一方向に向け、駆動歯を反対方向に向ける。
【0015】
本発明の一実施例においては、撓み板中に単一の固有モードが励起されるように、櫛パターンを撓み板の全ての固有モードに対して位置揃えする。一設計例においては、櫛パターンによりセンサに単一の顕著なピークを出力させてセンサ性能を改善する。本発明の櫛パターンにより、単一のピーク又は他のピークより遥かに大きなピークとなるようにセンサの伝達関数を変換してもよい。好ましい実施例では、駆動歯を撓み板中に励起される固有モードと位置揃えすることができ、感知歯も撓み板中に励起される固有モードと位置揃えすることができる。典型的には、櫛パターンにより撓み板の圧電特性と協働して運動を起こさせる電界を発生させる。櫛パターンは、銅、チタニウム−白金−金(TiPtAu)金属、チタニウム−白金(TiPt)及びアルミニウムからなる群から選んだ材料製とすることができる。典型的には、櫛パターンを厚さ約0.1μmとし、櫛パターンにワイヤ結合パッド域及び接地用接点を含めることができる。一設計例においては、駆動歯を撓み板上に接触させ、感知歯を撓み板上に接触させる。理想的には、駆動歯を撓み板の全幅に亘り延在させ、感知歯を撓み板の全幅に亘り延在させる。
【0016】
撓み板波センサには、底基盤と、底基盤上に設けたエッチング停止層と、エッチング停止層上に設けた膜層と、底基盤及びエッチング停止層内に膜層の一部分が露出するように設けられ且つ実質上平行な内壁を有する空洞と、膜層上に設けた圧電層とを含め、櫛パターンを圧電層上に配置することができる。圧電層は、亜硝酸アルミニウム、酸化亜鉛、及びジルコニウム・チタン酸鉛からなる群から選んだ材料製とすることができる。典型的には、エッチング停止層を二酸化シリコン(SiO2)製とする。理想的には膜層をシリコン製とし、一例では底基盤をシリコン製とする。
【0017】
本発明の一設計例においては、底基盤にシリコン・オン・インシュレータ(SOI)ウェーハを含め、そのSOIウェーハにエッチング停止層に結合された膜層を形成する(エピタキシャル構造の)シリコン上側表面を含める。他の例では、エピタキシャル・シリコン上側表面上に圧電変換器を沈着させる。理想的には、圧電変換器内に開口をエッチングすることによりエピタキシャル・シリコンの接地用接点を設ける。一設計例においては櫛パターンにチタン−白金−金(TiPtAu)金属を含め、典型的には櫛パターンに櫛歯形状の金属電極、ワイヤ結合パッド領域、及び接地用接点を含める。一実施例においては、底基盤の厚さを約380μmとし、エピタキシャル・シリコン上側表面の厚さを約2μmとし、SiO2層の厚さを約1μmとし、櫛パターンの厚さを約0.1μmとする。駆動歯を長さ約300〜2000μmとし、駆動歯の相互間の間隔を約25〜50μmとすることができる。典型的には、感知歯を長さ約300〜2000μmとし、感知歯の相互間の間隔を約25〜50μmとする。
【0018】
本発明の撓み板波センサの他の態様は、長さと幅とを有する撓み板、及び撓み板中に励起される固有モードの数が少なくなるように撓み板の全長に亘り配置された駆動歯と感知歯とを有する撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。
【0019】
本発明の撓み板波センサの更に他の態様は、長さと幅とを有する撓み板、及び撓み板中に励起される固有モードの数が少なくなるように撓み板の全長に亘り配置された第1駆動歯の組と第2駆動歯の組とを有する撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。一実施例においては、撓み板波センサに、撓み板の全長に亘り配置された第1感知歯の組と第2感知歯の組とを含める。一典型例では、第1駆動歯組と第2駆動歯組とを相互に反対方向に向け、第1感知歯組と第2感知歯組とを相互に反対方向に向けることができる。一設計例では、第1駆動歯組と第2駆動歯組とを交互配置し、第1感知歯組と第2感知歯組とを交互配置する。交互配置した第1駆動歯組及び第2駆動歯組を撓み板の幅の約50%に亘り延在させ、交互配置した第1感知歯組及び第2感知歯組を撓み板の幅の約50%に亘り延在させる。他の典型例では第1駆動歯組と第2駆動歯組とを同一方向に向け、第1感知歯組と第2感知歯組とを同一方向に向けることができる。一設計例では、第1駆動歯組を第1感知歯組と交互配置し、交互配置した第1駆動歯組及び第1感知歯組を撓み板の幅の約50%に亘り延在させる。他の設計例では、第2駆動歯組を第2感知歯組と交互配置し、交互配置した第2駆動歯組及び第2感知歯組を撓み板の幅の約50%に亘り延在させる。
【0020】
本発明の撓み板波センサの更なる態様は、長さと幅とを有する撓み板、及び撓み板中に励起される固有モードの数が少なくなるように撓み板上に配置された第1駆動歯の組と第2駆動歯の組とを有し且つ第1駆動歯組を撓み板の全長の約75%に亘り延在させると共に第2駆動歯組を撓み板の全長の約25%に亘り延在させた撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。
【0021】
一実施例においては、撓み板上に配置された第1感知歯の組と第2感知歯の組とをセンサに含め、第1感知歯組を撓み板の全長の約75%に亘り延在させると共に第2感知歯組を撓み板の全長の約25%に亘り延在させ、第1感知歯組及び第2感知歯組を第1駆動歯組及び第2駆動歯組と交互配置する。一例においては、第1駆動歯組及び第2駆動歯組を一方向に向け、第1感知歯組及び第2感知歯組を反対方向に向ける。
【0022】
本発明の撓み板波センサの他の態様は、長さと幅とを有する撓み板、及び撓み板中に励起される固有モードの数が少なくなるように撓み板の全長の約50%に亘り配置された第1駆動歯の組と第2駆動歯の組とを有し且つ各駆動歯組をそれぞれ撓み板の一端部において撓み板のほぼ全幅に亘り延在させると共に撓み板の中心部において撓み板の中心に向けて湾曲させた撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。このセンサには、撓み板の全長の約50%に亘り配置された第1感知歯の組と第2感知歯の組とを含めることができ、各感知歯組をそれぞれ撓み板の一端部において撓み板のほぼ全幅に亘り延在させると共に撓み板の中心部において撓み板の中心に向けて湾曲させることができる。
【0023】
また本発明の撓み板波センサの他の態様は、長さと幅とを有する撓み板、及び撓み板中に励起される固有モードの数が少なくなるように撓み板上に配置された駆動歯と感知歯とを有し且つ駆動歯を撓み板の全長の約50%に亘り延在させると共に感知歯を撓み板の全長の約50%に亘り延在させた撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。
【0024】
本発明の撓み板波センサの更に他の態様は、長さと幅とを有する撓み板、及び撓み板中に励起される固有モードの数が少なくなるように撓み板上に配置された駆動歯の組と感知歯の組とを有し且つ駆動歯組を撓み板の全長の約50%に亘り延在させると共に感知歯組を撓み板の全長の約50%に亘り延在させた撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。
【0025】
また本発明は撓み板波センサの製造方法を提供するものでもあり、その一方法は、基板上にエッチング停止層を堆積するステップ、エッチング停止層上に膜層を堆積するステップ、膜層上に圧電層を堆積するステップ、圧電層上に圧電層の全長に亘り延在する駆動歯付きの櫛パターンを形成するステップ、基板を貫通し且つ実質上平行な内壁を有する空洞をエッチングするステップ、及びエッチング停止層の空洞と膜層との間の部分を除去して膜層の一部分を露出させるステップを含むことを特徴とする。その方法には、圧電層に孔をエッチングしてシリコン膜層上に接地用接点を形成する1以上のステップを含めることができる。
【0026】
更に本発明による撓み板波センサの他の製造方法は、基板上にエッチング停止層を堆積するステップ、エッチング停止層上に膜層を堆積するステップ、膜層上に圧電層を堆積するステップ、圧電層上に膜層の全長に亘り延在する駆動歯及び感知歯付きの櫛パターンを第1変換器として形成するステップ、圧電層上に第1変換器から間隔を隔てて第2変換器を形成するステップ、基板を貫通し且つ実質上平行な内壁を有する空洞をエッチングするステップ、エッチング停止層の空洞と膜層との間の部分を除去して膜層の一部分を露出させるステップ、及び露出された膜層の一部分上に吸収性コーティングを堆積するステップを含むことを特徴とする。
【0027】
本発明による撓み板波センサの製造方法には、圧電層に孔をエッチングしてシリコン膜層上に接地用接点を形成する1以上のステップを更に含めることができる。
【0028】
本発明の他の目的、特徴及び利点は、好ましい実施例に関する以下の説明及び図面から当業者には明らかになるであろう。
【発明を実施するための最良の形態】
【0029】
本発明は、好適実施例又は以下に説明する実施例以外にも他の実施例が可能であり且つ各種態様で実施又は実現することができる。従って本発明は、以下に説明し又は図示する構造及び配置の細部の応用例に限定されるものではない。
【0030】
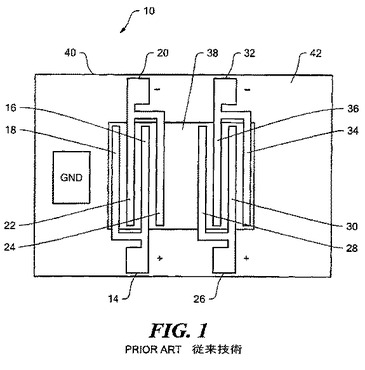
図1は従来の撓み板波センサ10を示す。背景技術欄で説明したように従来の撓み板波センサ10は、駆動歯16及び18付きの駆動櫛パターン14と駆動歯22及び24付きの駆動櫛パターン20とを有する。典型的には駆動櫛パターン14と駆動櫛パターン20とを逆極性で駆動し、例えば駆動櫛パターン14を正極性で駆動すると共に駆動櫛パターン20を負極性で駆動することにより、固有モードの正ピーク及び負ピークと位置揃えする。
【0031】
図1に示すように、撓み板38上の駆動櫛パターン14及び20の設置長さは、撓み板38の全長の僅か約25%〜40%に過ぎない。駆動櫛パターン14及び20の長さが制限されているので、駆動歯の数すなわち駆動歯16、18、22、24の数も限られている。背景技術欄で説明したように、撓み板38の固有モードのピークの数に比し駆動歯の数が少ないと複数個の固有モードが励起される。
【0032】
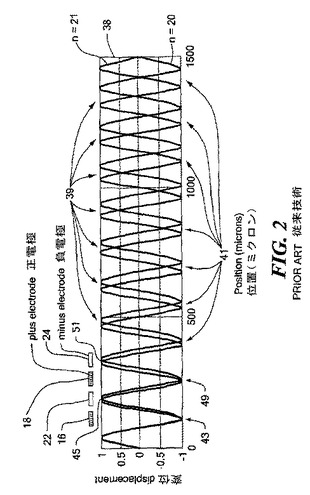
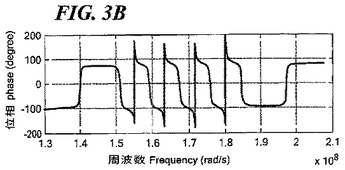
例えば図2は、図1の撓み板38の縦固有モードのモード変位(modal displacement)を、モード数n=20の場合とn=21の場合について示したものである。ここにモード数nとは、近似的に板38上に現れる半正弦周期の数(n≒正弦周期/2)である。図2が示すように、固有モードのピーク39(n=20の場合)及び41(n=21の場合)の数に比して駆動歯16、18、22及び24の数は明らかに少ない。その結果、矢印43、45、49及び51で示すように、単にn=20の固有モードが被励起駆動歯16、18、22及び24と完全に位置揃えされるだけでなく、他の固有モードも励起される。被励起固有モードの数の増加は、図3Aのピーク60、62、64及び66に示すような一連の類似振幅の共振ピークの列、及び図3Bに示すような異常位相(irregular phase)を生じさせる。
【0033】
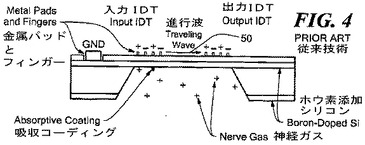
図1の従来のセンサ10も、典型的には駆動櫛パターン14及び26から見て撓み板38の反対側端縁に設けた感知櫛パターン26及び32を有し、両感知櫛パターン26、32はそれぞれ感知歯28、30及び34、36を有する。背景技術欄で説明したように、従来センサ10が依存する表面弾性波(SAW)の理論は、波が図4の矢印50で示すように駆動櫛パターン14及び20から感知櫛パターン26及び32へ伝搬するとし、反射戻りを干渉とみなしている。しかし、SAW理論に依存したのでは、センサ10によって生じる多数の小ピークを説明することができず、利得の計算値が小さくなり鋭い位相減少を説明できない。
【0034】
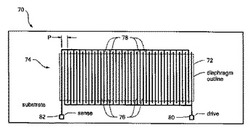
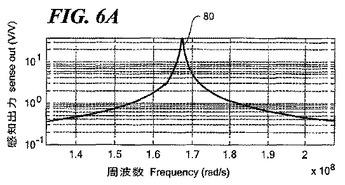
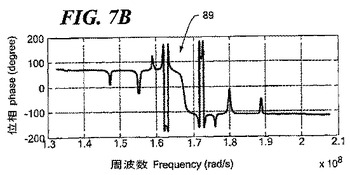
対照的に図5に示す本発明の撓み板波センサは、長さと幅とを有する撓み板72上に櫛パターン74を設けた撓み板波センサ70において、櫛パターン74に撓み板72の全長に亘り取付けた駆動歯76を含めることにより、撓み板72の中に励起される固有モードの数を少なくする。一設計例においては、櫛パターン74を撓み板72の全ての固有モードと位置揃えする。好ましい実施例では、1つの固有モードのみを励起する。その結果として撓み板波センサ70は、例えば図6Aのピーク80のような単一の大きなピークを図6Bに示す明確な位相で出力するか、又は図7Aに示すように他の諸ピーク84、86より遥かに大きく顕著な単一の大きなピーク82を図7Bの矢印89で示す明確な位相で出力する。これは、従来技術による図3A及び図3Bの類似振幅のピーク群及び不規則位相に対して極めて対照的である。その結果は、図5の撓み板波センサ70の操作及び設計の重要な簡単化である。以下に説明する本発明の閉ループ電子装置の設計は単一モードにおいてのみ励起することが可能であって、(図3A及び図3Bに示される)他の固有モードから飛出すモードが作る干渉に起因する読取値の錯誤をなくし、それによってシステムの安定度を向上させる。
【0035】
本発明の一設計例においては、図5に示すように、撓み板72の全長に亘り配置した感知歯78を撓み板波センサ70に設ける。一実施例においては、感知歯78と駆動歯76とを反対方向に向ける。図示例では感知歯78と駆動歯76とが交互配置(挟み込み配置)されている。典型的には、撓み板72中に励起される固有モードに対して感知歯78を位置揃えし、作られた出力を駆動歯76により検出する。
【0036】
本発明の一実施例では、櫛パターン74を銅製とする。他の例では、櫛パターン74をチタニウム−白金−金(TiPtAu)、チタニウム−白金(TiPt)、アルミニウムその他の任意の既知材料又は当業者に知られた材料製とする。典型的な櫛パターン74は厚さ約0.1μmであり、図5に示すようにワイヤ結合パッド域80a、82aを有する。
【0037】
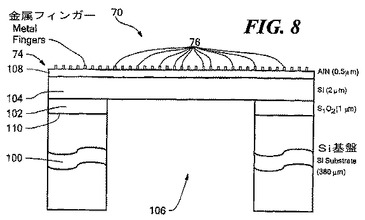
撓み板波センサ70は、典型的には図8に示すように複数の層からなる。典型的なセンサ70は、厚さ380μmのシリコン製の底基板100、及び基板100上に設けた理想的には厚さ1μmの二酸化シリコン(SiO2)製エッチング停止層102を含む。また理想的にはセンサ70に、エッチング停止層102上に設けたシリコン又は同様な材料製の膜層104と、空洞106とを含める。典型的には、シリコンを成長させて膜層104(例えばダイヤフラム層)を形成する。空洞106は実質上平行な内壁面を有し、底基板100及びエッチング停止層102内に膜層104の一部分が露出するように設ける。一実施例では、厚さ0.5μmの圧電層108を膜層104上に設ける。その圧電層108上に、駆動歯76及び感知歯78を有する櫛パターン74(図5参照)を配置する。典型的には膜層104を大地(図示せず)に接続する。理想的には圧電層108を窒化アルミニウム、酸化亜鉛、及びジルコン・チタン酸鉛等の材料製とする。
【0038】
他の設計例は、底基板100をシリコン・オン・インシュレータ(SOI)ウェーハとし、エッチング停止層102に結合した(エピタキシャル構造の)シリコン上側表面(すなわち膜層104)を含む。理想的には、圧電層108内へのエッチング穿孔によって、シリコン層(例えば膜層104)の接地用接点を設ける。好ましい実施例では、チタン−白金−金又はチタン−白金の金属材料のパターン成形により、圧電層108(図8参照)の全長に亘って延びる駆動歯76及び感知歯78付きの櫛パターン74(図5参照)を形成する。理想的には、櫛パターン74にワイヤ結合パッド80a、82a(図5参照)及び接地用接点(図示せず)を含めて形成する。駆動歯76及び感知歯78を長さ300〜2000μmとし、駆動歯76と感知歯78との間の間隔を約25〜50μmとする。
【0039】
以上説明したように、撓み板72の全長に亘り配置された駆動歯76を有する撓み板波センサ70における櫛パターン74の独特な設計は、撓み板72中に励起される固有モードの数を有効に減少させ、且つ、単一の著しいピーク又はセンサ70からの出力中の他の何れのピークより遥かに大きいピークを出力する。その結果として、撓み板波センサ70の操作及び設計を簡単化することができる。
【0040】
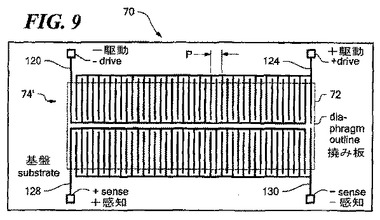
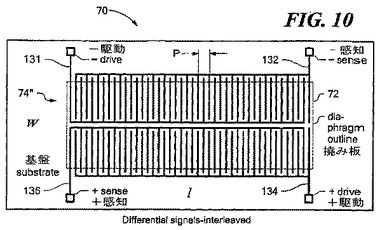
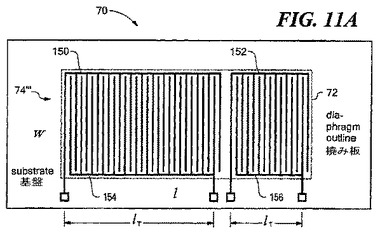
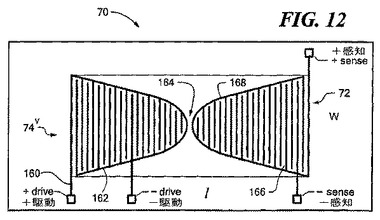
独特な櫛パターン74には幾つかの形態が可能であり、例えば、それぞれ撓み板72の全長に亘って延びると共に幅の約50%に亘って延びる交互配置の駆動歯の組と交互配置の感知歯の組とからなる形態(図9参照)、それぞれ撓み板72の全長に亘って延びると共に幅の約50%に亘って延びる交互配置の駆動歯・感知歯の組の2組からなる形態(図10参照)、撓み板72の全長の約75%に亘って延びる交互配置の駆動歯・感知歯の1組と撓み板72の全長の約25%に亘って延びる交互配置の駆動歯・感知歯の他の1組とからなる形態(図11A参照)、及び独特な湾曲形状の駆動歯・感知歯の組からなる形態(図12参照)である。当業者は、他の同等な実施例に容易に想到することができるであろう。
【0041】
図9の櫛パターン74iは、撓み板72の全長に亘り配置された第1駆動歯組120と第2駆動歯組124とを含む。この櫛パターン74iには撓み板72の全長に亘り配置された第1感知歯組128と第2感知歯組130とを含めることができ、これらを第1駆動歯組120及び第2駆動歯組124によりもたらされる出力の感知のために用いることができる。図示例では第1駆動歯組120を負極性で駆動すると共に第2駆動歯組124を正極性で駆動するが、これは撓み板72の固有モードの負及び正のピークに位置揃えするためであり、励起される固有モードの低減を助けるためである。同様にして、第1感知歯組128を正極性で駆動し、第2感知歯組130を負極性で駆動する。第1駆動歯組120と第2駆動歯組124とは反対方向に向け、互いに挟み込んで交互配置する。同様にして、第1感知歯組128と第2感知歯組130とを反対方向に向け、互いに挟み込んで交互配置する。この設計では、第1駆動歯組120と第2駆動歯組124との両者が交互配置されると共に、撓み板72の全長に亘り配置され且つ撓み板72の幅の約50%に亘って延びる。同様にして、第1感知歯組128と第2感知歯組130との両者が交互配置されると共に、撓み板72の全長に亘り配置され且つ撓み板72の幅の残余の約50%に亘って延びる。この設計の櫛パターン74iは、単に励起される固有モードの数を減らすだけでなく、センサ70の出力におけるピークの数の減少に貢献する。
【0042】
図10に示す本発明の他の実施例では、上述した櫛パターン74iの設計を、第1駆動歯組が第1感知歯組と交互配置するように修正している。同図に示す櫛パターン74iiは、交互配置する第1駆動歯組131と第1感知歯組132とを含む。交互配置された第1駆動歯組131と第1感知歯組132とは、撓み板72の全長に亘り配置され且つ撓み板72の幅の50%に亘り延びる。図示例の櫛パターン74iiは交互配置する第2駆動歯組134及び第2感知歯組136をも含み、それらも同様に撓み板72の全長に亘り配置され且つ撓み板72の幅の50%に亘って延びる。典型的には、両駆動歯組(例えば駆動歯組131及び134)を反対極性で駆動し、両感知歯組(例えば感知歯組132及び136)を反対極性で駆動する。上述した図9の設計と同様に図10の設計も、単に励起される固有モードの数を減らすだけでなく、センサ70に励起されるピークの数を減少させる。
【0043】
図11Aに示す設計では、櫛パターン74iiiが第1駆動歯組150と第2駆動歯組152とを含む。第1駆動歯組150は撓み板72の全長の約75%に亘って延び、第2駆動歯組152は撓み板72の全長の約25%に亘って延びる。また櫛パターン744iiiは、撓み板72の全長の約75%に亘って延び且つ第1駆動歯組150と交互配置される第1感知歯組154と、撓み板72の全長の約25%に亘って延び且つ第2駆動歯組152と交互配置される第2感知歯組156を含む。この設計も撓み板72中に励起される固有モードの数を減少させる。
【0044】
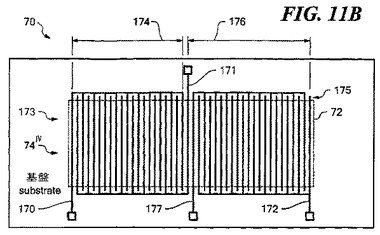
図11Bに示す他の設計では、櫛パターン74ivが撓み板72上に配置された駆動歯170と感知歯172とを含む。矢印174で示すように駆動歯170は撓み板72の全長の約50%に亘って延び、矢印176で示すように感知歯172も撓み板72の全長の約50%に亘って延びる。この櫛パターン74ivも同様に撓み板72中に励起される固有モードの数を減らす。
【0045】
この設計の櫛パターン74ivには、駆動歯170及び駆動歯171を有する駆動歯組173を含めることができる。矢印174で示すように、駆動歯組173は撓み板72の全長の約50%に亘って延ばす。またこの設計の櫛パターン74ivには、感知歯172及び感知歯177を有する感知歯組175を含めることができる。矢印176で示すように、知歯組175も撓み板72の全長の約50%に亘って延ばす。この様な設計においても同様に、撓み板72中に励起される固有モードの数を減らすことができる。図11Bでは駆動歯組173を駆動歯170と駆動歯171との交互配置により構成し、感知歯組175を感知歯172と感知歯177との交互配置により構成しているが、これは本発明の限定条件ではなく、駆動歯(例えば駆動歯170又は駆動歯171)を感知歯(例えば感知歯172又は感知歯177)と交互配置してもよい。
【0046】
図12に示す本発明の更に他の設計では、櫛パターン74vが撓み板72の全長の約50%に亘り配置される第1駆動歯の組160及び第2駆動歯の組162を含む。第1駆動歯組160及び第2駆動歯組162の輪郭は、撓み板72の一端部において撓み板72のほぼ全幅に亘り延在し且つ撓み板72の中心164に向けて縮小傾向に湾曲する。この櫛パターン74vの独特な設計は、撓み板72中に励起される固有モードの数の低減及びセンサ70の出力中のピークの数の減少に貢献する。櫛パターン74vには、第1駆動歯組160及び第2駆動歯組と類似輪郭形状を有し且つ交互配置された第1感知歯組166及び第2感知歯組168を含めることができる。
【0047】
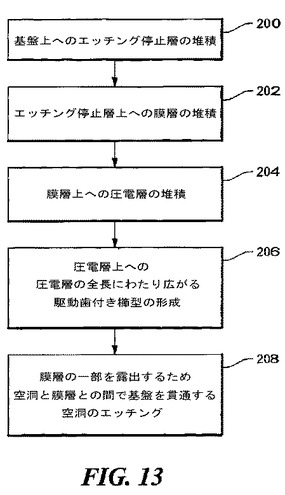
本発明の撓み板波センサ70の製造方法は、図13に示すように、図8の基板100上にエッチング停止層102を堆積するステップ200、図8のエッチング停止層102上に膜層104を堆積する(例えば付加的にシリコンを成長させる)ステップ202、図8の膜層104上に圧電層108を堆積するステップ204、図8(及び図5、図9〜図11)の圧電層108の全長又はその一部分に亘り延在する駆動歯76付き櫛パターン74を形成するステップ206、及び基板100を貫通するように図8の空洞106をエッチングして空洞106と膜層104との間で膜層104を部分的に露出させるステップ208を含む。他の例においては、基盤100として、予め結合された酸化物層(例えばエッチング停止層102)とシリコンダイヤフラム層(例えば膜層104)とを含むシリコン−オン−インシュレータ(SOI)を用いる。
【0048】
以上説明したように本発明による丈夫な撓み板波センサ70は、撓み板72中に励起される固有モードの数が減少するように撓み板72の全長に亘り配置された複数の独特な構成要素からなる櫛パターンを有し、その櫛パターンにより撓み波板の操作及び設計を簡単化するものである。撓み波板の全長に亘り延在する駆動歯を有する独特の櫛パターンは、櫛パターン自体が撓み波板の固有モードとの位置揃えの機能を与える。その結果として、撓み板波センサ70は単一の顕著なピーク又は他のピークより遥かに大きなピークを発生することができ、撓み板波センサ70の高い安定性と改良された性能と設計の簡単化とが達成される。
【0049】
背景技術欄で述べたように、従来の撓み板波センサ10(図1参照)は、撓み板の両端縁に設けた駆動櫛パターン14、20と感知櫛パターン26、32とを用いる。従来のセンサ10は表面弾性波(SAW)の類推の基づく理論に依存しているが、その理論では、図4に示すように波が駆動櫛パターン14、20から感知櫛パターン26、32へ伝播し、戻り反射は干渉とみなされる。
【0050】
本発明者らは、この種の表面弾性波(SAW)の類推は大部分の撓み板波装置では不正確であることを見出した。とくに図14及び図9〜図11に示すような単純端縁条件(simple edge conditions)の設計の撓み板は、実際には共振板として振舞う。以下の式(1)〜(14)の解析は、撓み板302(図14参照)を細いビーム(梁)としたモデルに基づくものである。撓み板302の固有振動数の計算と製品の性能との比較によれば、このビーム・モデルは図14及び図9〜図11のセンサ70に対してだけでなく撓み板(共振板)302及びセンサ300に対しても有効である。後述する式(16)及び式(17)を用いれば、単純なビーム・モデルを拡張して撓み板302の厚さ方向の付加的モードを考察することもできる。
【0051】
図14を参照するに、撓み板302を含む撓み板波センサ300の駆動電圧はゼロ基準となるセンター接地の変圧器304に印加され、その変圧器により撓み板波センサ300の一方の電極に+VDを印加し、他方の電極に−VDを印加する。変圧器304の入力側は大地306とVDとに接続する。出力側をセンタ・タップすることにより両端を+VD及び−VDとする。本発明の他の実施例では、例えば当業者に周知のピアス(Pierce)又は直列発信器等の駆動回路を出力として用いたワンポート操作を採用することができる。駆動対は、例えば+VD及び−VDである電極対又は駆動櫛パターン350及び352である2つの電極を有する。感知対は、例えば電極又は感知櫛パターン354及び356である2つの電極又は感知櫛パターンを有し、典型的にはそれらをそれぞれ例えば差動増幅器355及び357である差動増幅器の入力端対に接続する。一設計例においては、例えば電極又は櫛パターン350、352、354及び356である全ての電極を撓み板302の圧電層(図示せず)の頂面に堆積する(上述した図8の撓み板波センサ70の設計と同様である)。図14のシリコン層309は典型的には大地306に接続する。
【0052】
固有モードと撓み板電圧との関係を以下に示す。次の式(1)の誘導は非特許文献1に開示されており、これを引用により本明細書に含める。以下の諸方程式は、図14に示すz方向の細いビームの振動に基づく。任意位置の変位z(t)は式(1)で与えられ、各機械的モードにおける運動方程式は式(2)となる。
【0053】
式(1)及び式(2)において、φn(x)は式(2a)に示すように作り付けダイヤフラム端縁に対する固有モード波形(式(2a)の右辺)にほぼ等しく、単純支持端縁に対しては式(2b)となる。作り付け端縁に対する固有値λnは式(2c)であり、単純支持の端縁に対する固有値λnは式(2d)である。nは撓み板の長さL中における半波長の数に等しい正の整数、Lは撓み板の長さである。mpは単位長さ当たりの質量、bは単位長さ当たりの減衰(damping)、Anは励起されたn番目のモード運動の振幅、fn(t)はモードnに対する強制関数(forcing function)である。

【0054】
単純支持及び作り付け支持に対して、共振角周波数ωnと波数λとの間には式(3)の関係がある。ここにDは剛性である。
【0055】
式(4)のモード波形φn(x)が与えられたと仮定し、φ=0のピン止めしたビームを仮定する。モードの数が多いので、ピン止めしたビームは作り付けビームとほとんど変わらない。更に、ビームを式(5)による第1高調波を有する力密度w(x,t)で駆動したと仮定する。式(5)においてwnは式(5a)で表され、Mpは電極へ印加される1ボルト当たりの圧電トルクの大きさであり、VDは駆動歯352(図14参照)に印加される電圧であり、λtは櫛パターン(変換器)の長さ=mP/2(Pは櫛パターンの歯のピッチ、mは変換器中の歯の数又は長さL中の半サイン(half sine)の数)である。θは櫛パターンの各歯と基準との間のアラインメント(alignment)である。
【0056】
式(2)、式(4)及び式(5)を用いて、式(6)のようにモード強制関数(modal forcing function)fn(t)を求めることができる。式(6)においてx0は櫛の始点であり、x0+λtはその終点である。式(6)から、入力電圧VDに対するモード力fnの比に関連付けて、γnが式(7)のように定義される。式(7)は駆動歯及び感知歯の両者の電極、すなわち駆動歯350、352及び感知歯354、356からなる櫛パターン対349(又は図5及び図9〜図12の何れかの設計)に適用することができる。積分は、櫛パターンが力を及ぼす範囲、すなわち変換器の長さλt(図11Aのl)全体に対して行われる。単純支持ではφがゼロに等しい。γの単位はm/Vであり、γは(1/λn)4に比例する。櫛パターンとモードとの位置揃えがされたとき、θがゼロとなり、強制関数は式(8)のようになる。
【0057】
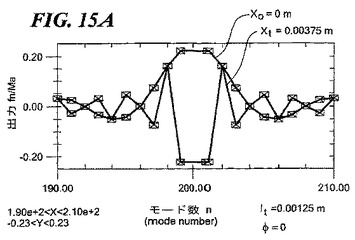
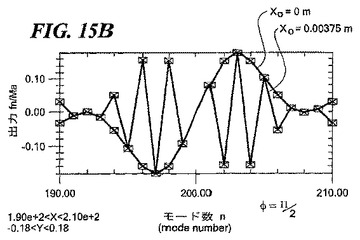
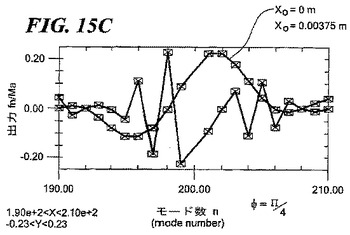
図15A〜図15Cは、変換器の長さを0.00125mとし、図14の撓み板302の長さを0.005mとし、櫛の歯の数mを50mμピッチで50とした場合に、位相θ=0、π/2、π/4におけるモード振幅応答fn(t)/[wasin(ωt)]の値を示す。固有モードの波長が櫛ピッチとマッチするときに、撓み板波センサ300の最大強制が得られる。
【0058】
本発明によれば、駆動長さ、すなわち撓み板波センサ300の駆動歯352を有する櫛パターン(図5及び図9〜図11の設計を含む)の長さが撓み板302の全長に亘って延在するに足りる場合は、x方向において単一モードのみが励起され、簡単な二階(second order)システムとなり、図6Aに示すように単一の顕著なピークを出力する。更に櫛の長さと歯の幅を変えることにより、高調波の原因となるy方向関数の圧電曲がりを抑制することができ、y方向の正弦波状高調波が励起しないようにすることができる。
【0059】
式(8)において、長さw(x,t)当たりの力はその第一次高調波で代表した。式(6)のモード強制関数fn(t)は式(8a)を含む分母の項により支配されるので、w(x,t)の高次高調波は大きな値のmを有し、式(8)に対する貢献がほとんどない。
【0060】
ビーム・モードを出力に結合するため、図14の撓み板302上での歪から電荷への変換を用いる。撓み板302が接地されていると仮定すれば、単位長さ当たりの表面電荷Qxは式(9)のように記述される。式(9)において、d31はz方向電界をx方位歪に関連付ける圧電定数であり、Yは圧電材料のヤング率であり、νpはポアソン比であり、bはダイヤフラムの幅である。
【0061】
式(1)及び式(4)を用いることにより、圧電材料の中央部におけるピーク歪εPとモード振幅との関係は式(10)のように示される。式(10)において、Δzmは圧電材料の面積中心とトルク入力に対する撓み板の中性軸との間の距離であり、Rはその位置での曲率半径である。
【0062】
全電荷は、式(9)を電極群(すなわち図14の櫛パターン350及び352)全体に対して積分することにより算出する。式(10)中に正弦関数であるので、この積分はフーリエ変換に類似しており、式(11)のように板分布(plate distribution)の第一次高調波を考慮することが容易である。
【0063】
式(11)に式(9)及び式(10)を代入することにより、駆動電極又は感知電極(例えば駆動櫛パターン350及び352、又は感知櫛パターン354及び356)上の全電荷Qを式(12)のように表すことができる。式(12)において、モード振幅Anと電荷Qとの結合係数αnは式(13)で与えられる。
【0064】
式(13)の括弧内の積分は式(7)のモード力の計算に用いたものと同一である。αnの単位はクーロン/メートルであり、αnはλn2に比例する。
【0065】
圧電ダイヤフラム・モデルを他の電気回路素子付きの集中パラメータ・モデルへ次のように組み込む。例えば典型的な圧電櫛の組349は、2つの電極350及び352と接地面306とを有する。単一モードに対して、モード振幅変位Anと電極電位用の電荷Qとモード力fnとを関連付ける静止的方程式は式(14)のように表される。式(14)において,Cは一枚の板から大地への静電容量、C12は正及び負の電極間の静電容量、αn及びγnは式(13)及び式(7)で定義した圧電結合係数、knはモード硬さ(modal stiffness)、D1は駆動櫛パターン350のような正の駆動電極、D2は駆動櫛パターン352のような負の駆動電極をそれぞれ表す。αn及びγnに付した負の符号は、負の電極が正の電極から180度離れて配置されることを示す。式(15)に示すように、負の櫛パターンに印加される電圧は、正の櫛パターンに印加される電圧のマイナス符号である。
【0066】
式(14)において暗示された些細な結合仮定により、撓み板に印加される電圧及び電流はなお方程式(9)〜式(13)で表される。式(14)の誘導の結果はQD2=−QD1となり、図14の回路図と一致している。QD1は上に定義した電流I2の積分である。読み取れる対称性と差分とから式(16)が導かれる。
【0067】
式(16)を整理すると式(17)のようになる。
【0068】
回路抵抗器を加える時に、Qは式(16)に示した2つの電流からなる。式(16)及び式(17)は駆動電極及び感知電極の両者の対を示している。
【0069】
電荷とは電極上の全体を合算した全電荷であり、力とはビームに沿った単位長さ当たりの力であるモード力である。モード周期が櫛パターン周期と一致する場合は式(18)が成立し、その場合は櫛パターンと固有モードとが位置揃えされ(すなわちθが式(7)のφと等しくなり)、式(19)に示すように圧電式(17)が相反形式(form of reciprocity)に従う。この相反則は、電圧、モード力、長さあたりの電荷、及びモード振幅の間の対称性を表している。櫛パターンと固有モードとの位置揃えがされていない場合は、式(19)が成立しない。
【0070】
以上の結果が本発明による包括的・動的な撓み板波センサに組み込まれ、励起電圧と前置増幅器の出力とを関連付ける。以下の例では簡明のため3つのモードのみを含めているが、これは本発明に必要な制限条件ではなく、図3A、図3B、図6A、図6B、図7A及び図7Bに示すように当業者は任意数のモードを含めることができる。上述したように電荷は正及び負の電極の両者を含む。圧電材料に直接印加される電圧及び力は式(20)のように示される。
【0071】
圧電材料に直接印加される力は式(21)のように表され、図14の駆動櫛パターン350に印加される電圧は式(22)である。式(22)において、Vは電源から印加される電圧であり、RDは入力抵抗である。
【0072】
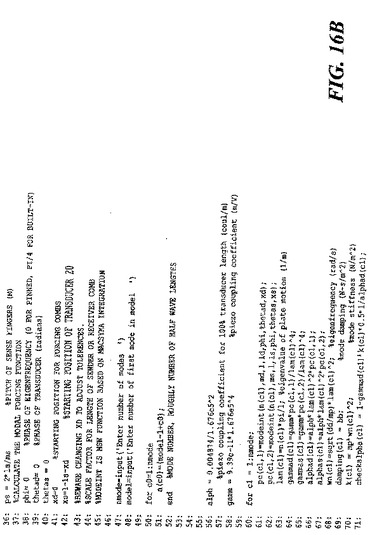
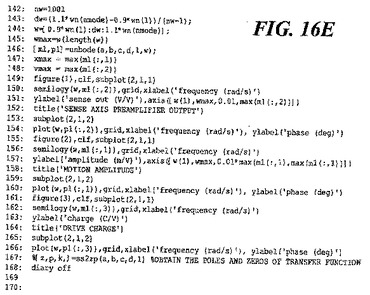
出力側の前置増幅器が実質上大地であると仮定すると、感知電圧は式(23)で与えられる。式(23)において、RSは感知抵抗である。除数2は、正および負の電極を含む式(15)におけるQの定義を考慮したものである。周波数応答を得るための式(20)〜式(23)に対するMATLAB(登録商標)によるコーディング例を図16A〜図16Cに示す。
【0073】
非特許文献2は、例えば図14の撓み板302のような矩形板によるx及びy方向の固有モードの一次近似として、ビーム理論により導いたものを教示している。変位は、x方向のシヌソイド(sinusoid)にy方向のシヌソイドを乗算したものである。四方端縁を作り付け又は単純支持した等方性又は直交異方性の矩形板の場合は、固有周波数群(ヘルツ単位)の近似が式(24)で与えられる。式(24)において、nは長さに沿ったモード数であり、mは幅に沿ったモード数であり、λは板の長さ(例えば0.005m)であり、bは板の幅(例えば0.001m)である。G(n)は、単純支持の場合はnに等しく、全端縁作り付けの場合は(n+1)/2に等しい。J(n)は、単純支持の場合はn2に等しく、全端縁作り付けの場合は式(24a)に等しい。Yはヤング率であり、hは板厚であり、maは単位面積当りの質量である。
【0074】
単純支持板の場合は、式(24)は式(25)のようになる。
【0075】
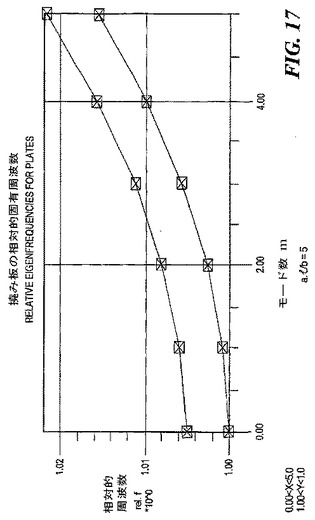
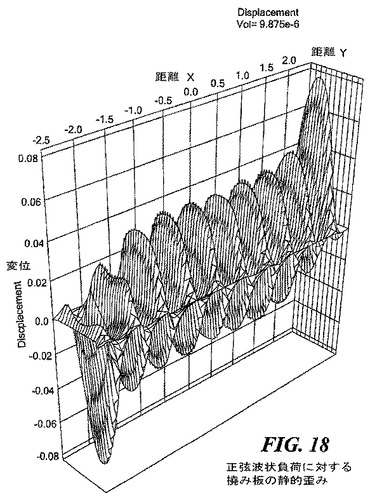
名目上の例として、m=0で単純支持した場合に対する相対的固有振動数とモード数nとの関係を図17に示す。λ/b=5に対するものである。式(24)及び式(25)は、m=0の場合のビーム理論を再現したものである。作り付けの場合の固有周波数は、単純支持の場合よりも0.50%高い。m=1でn=200の場合、m=0の単純ビームの場合よりも、作り付けの共振周波数が0.085%高い。このm=1の周波数がビーム理論値に近く、基本的動作周波数である。図18に示すように、変位はm=1の場合のモード波形に近い。モード数mがより高次である場合は、y(短い)方向の半サインの数がより多くなる。m=2のとき、次の共振は基本的動作周波数(m=1)より0.21%高くなる。一直線の歯群を用いた場合、奇数高調波が励起されるが、(製作上のずれを除き)励起すべきでない。作り付けの場合、m=3の共振は基本波より0.6%高くなる。y方向では励起が方形であるにも拘らず、図18に示すように、固定したx方向に沿う応答はほとんどシヌソイド的である。方形駆動を用いると駆動の第3高調波は基本波の1/3である。図3Aは、従来のセンサ10において諸モードと交差するギザギザを示す。これとは極めて対照的に、本発明による図5、図9〜図11の撓み板波センサ70及び図14の撓み板波センサ300は、撓み板の全長に亘って延びる独特の櫛パターンを有するので、図6A及び図6Bに示すように単純で顕著なビーク又は他の諸ピークより遥かに大きなピークを、図7A及び図7Bに示すように明確な位相で発生する。
【0076】
本発明の特定の特徴を一部の図面に示し他の図面に示さなかったが、これは専ら便宜上のことであり、本発明においては何れの特徴をも他の何れか又は全ての特徴と組み合わせることができる。本文における「含み(including)」、「からなり(comprising)」、「有し(having)」及び「付き(with)」の語は広義且つ包括的に解釈し何れかの物理的関連に限定されないものとする。更に、本出願に記載した何れの実施例も単なる可能な実施例と捉えないものとする。当業者は、本発明の特許請求の範囲の枠内で他の実施例に想到することができるであろう。
【図面の簡単な説明】
【0077】
【図1】撓み板の約25%〜50%に亘り配置した駆動櫛及び感知櫛を有する従来技術の撓み板波センサの頂面図である。
【図2】図1のセンサの櫛パターンに対する複数の変位固有モードの関係を示すグラフである。
【図3A】図1のセンサの典型的出力を示すグラフである。
【図3B】図3Aに示されるピークに対する不規則的な位相応答を示すグラフである。
【図4】図1のセンサの波伝搬方向を示す図式的側面図である。
【図5】本発明による撓み板波センサの一実施例の図式的頂面図である。
【図6A】図5に示す撓み板波センサによる単一の大きなピーク出力を示すグラフである。
【図6B】図6Aに示すピークに対する明確な位相応答を示すグラフである。
【図7A】図5に示す撓み板波センサによる複数振幅の出力中の数個の大きなピーク出力を示す他のグラフである。
【図7B】図7Aに示す諸ピークに対する明確な位相応答を示すグラフである。
【図8】本発明による撓み板波センサにおける各種層を示す図式的側面図である。
【図9】本発明による撓み板波センサにおける櫛パターンの他の実施例を示す図式的頂面図である。
【図10】本発明による撓み板波センサにおける櫛パターンの他の例を示す図式的頂面図である。
【図11A】本発明による撓み板波センサにおける櫛パターンの他の設計を示す図式的頂面図である。
【図11B】本発明による撓み板波センサにおける櫛パターンの更に他の設計例を示す図式的頂面図である。
【図12】本発明による撓み板波センサにおける櫛パターンの更なる他の設計例を示す図式的頂面図である。
【図13】本発明による撓み板波センサの一製造方法に係る主要な諸過程を示す流れ図である。
【図14】本発明による撓み板波センサの一実施例に関連する図式的回路図である。
【図15A】本発明による撓み板波センサの出力を例示するグラフの一例である。
【図15B】本発明による撓み板波センサの出力を例示するグラフの他の一例である。
【図15C】本発明による撓み板波センサの出力を例示するグラフの更に他の一例である。
【図16A】本発明の撓み板波センサの一実施例の三モード周波数応答に対するMATLABのコーディングリストの先頭部分である。
【図16B】図16Aに続くMATLABのコーディングリストの一部分である。
【図16C】図16Bに続くMATLABのコーディングリストの一部分である。
【図16D】図16Cに続くMATLABのコーディングリストの一部分である。
【図16E】図16Dに続くMATLABのコーディングリストの一部分である。
【図16F】図16Eに続くMATLABのコーディングリストの最終部分である。
【図17】本発明の撓み板波センサの一実施例の相対的固有周波数を示すグラフである。
【図18】本発明の撓み板波センサへの正弦波形負荷に対する板の静的歪みを示すグラフである。
【符号の説明】
【0078】
10、70、300…撓み板波センサ
14、20、350、352…駆動櫛パターン
16、18、22、24、76、170、171…駆動歯
26、32、354、356…感知櫛パターン
28、30、34、36、78、172、177…感知歯
38、72、302…撓み板
39、41…固有モードのピーク
43、45、49、51…他の固有モード
50…(波の方向を示す)矢印、
60、62、64、66…類似振幅の共振ピーク
74、74i、74i、74iii、74iv、74v…櫛パターン
80…単一ピーク
80a、82a…ワイヤ結合パッド域
82…他のピークより遥かに大きなピーク
84、86…他のピーク
89…(明確な位相を示す)矢印
100…底基板
102…ETTINGワイヤ結合パッド域
104…膜層
106…空洞
108…圧電層
120、131、150、160…第1駆動歯組
124、134、152、162…第2駆動歯組
128、132、154、166…第1感知歯組
130、136、156、168…第2感知歯組
164…中心
173…駆動歯組
174、176…矢印
175…感知歯組
200、202、204、206、208…ステップ
304…中央接地変圧器
306…大地
309…シリコン層
349…(圧電)櫛対
355、357…差動増幅器
【技術分野】
【0001】
本発明は、一般に撓み板波センサ(flexural plate wave (FPW) sensor)に関し、とくに撓み板波センサ用の改良された櫛パターンに関する。
本出願は「撓み板波センサ」と題する2003年9月30日出願の米国特許願第10/675,398号に基づく優先権を主張する。
【背景技術】
【0002】
FPWセンサは撓み板(可撓性板又はダイヤフラム)を有し、その撓み板の形状とその撓み板上に設けた櫛パターンとで定まる複数の周波数において発振するように駆動される。撓み板上に設けた櫛パターンが電界を創り出し、その電界が撓み板の圧電特性との協働により運動を励起する。複数の固有モード(eigenmodes)が、空間的に分布したピーク群を表示するようなダイヤフラム変位(diaphragm displacements)を示す。各固有モードは、ダイヤフラムの長さに沿ったn個の半サイン周期(half sine periods)からなる。典型的なFPWセンサは、80以上の固有モードに対して励起され得る。典型的なFPWセンサにおいては、板の歪みが多数のシヌソイド的(sinusoidal)(又はシヌソイド近似的)なピークからなる。
【0003】
従来の典型的なFPWセンサは、撓み板の一端に駆動櫛の群を有し、その他端に感知櫛の群を有する。これらの従来装置における駆動櫛の群は、典型的には板の全長の僅か25%〜40%を占めるに過ぎない。固有モードのピークの数に比して駆動櫛の歯数が少ない場合は、それら少数の駆動歯を数個の固有モードと位置揃えすることができる。しかしその結果として、単に固有モードのピークが被励起櫛歯と完全に位置揃えされるだけでなく、(ピーク以外の)他の固有モードまでもが励起されてしまう。信号処理及びスペクトル分析では、この効果は洩れ(leakage)として知られている。従来の設計の重大な欠点は、FPWセンサにおける被励起櫛歯数の増大が共振振幅の類似した複数ピークの列を発生させ、それが従来の波センサの設計及び操作上の問題の複雑性を高めていることにある。
【0004】
更に従来のFPWセンサは、撓み板の対向端縁における駆動櫛の群と感知櫛の群とを利用すると共に、表面弾性波又は表面音波(SAW、surface acoustic waves)の類似・類推に基づく解析に依存している。この解析では、波が駆動櫛から出て感知櫛へ向けて伝播するとし、反射波の戻りを干渉とみなしている。この解析の明白な欠点は、SAW理論では計算上生じる低い値の利得(例えば類似振幅のピーク群)の原因となるセンサ出力中の小ピーク群を説明しないこと、及びピーク群に付随して見られる鋭い位相低下群(phase drops、例えば不規則位相)を説明しないことにある。
【0005】
【非特許文献1】ワインベルグ等(Weinberg et al)「撓み板波装置のモデル化(Modeling Flexural Plate Wave Devices)」Journalof Microelectro Mechanical Systems、Vol.9、2000年9月
【非特許文献2】ジェイ・ブレヴァンス(J. Blevins)「Formulas for Natural Frequency and Mode Shape」フロリダ州マラバルのRobert E. Krieger Publishing Co.、1979年
【発明の開示】
【発明が解決しようとする課題】
【0006】
従って本発明の目的は、改良された撓み板波センサを提供することにある。
【0007】
本発明の他の目的は、撓み板の中に励起される固有モードの数を少なくした撓み板波センサを提供することにある。
【0008】
また本発明の他の目的は、単一の強いピーク又は他のピークに比し著しく大きい1つのピークを発生する撓み板波センサを提供することにある。
【0009】
本発明の更なる目的は、位相が明確な出力を発生する撓み板波センサを提供することにある。
【0010】
また本発明の更なる目的は、設計及び操作が簡単な撓み板波センサを提供することにある。
【0011】
本発明の更に他の目的は、安定性及び性能を改善できる撓み板波センサを提供することにある。
【0012】
本発明が更に目的とすることは、他の固有モードから飛び出すモードに起因する干渉に基づく読み誤りの除去により安定性を改善した撓み板波センサを提供することにある。
【課題を解決するための手段】
【0013】
本発明は、撓み板上にその全長に亘り配置された駆動歯付き櫛パターンを設けることにより、撓み板中に励起される固有モードの数を減らすことができ、位相が明確で且つ単一の強いピークを出力させて撓み板波センサの操作及び設計の簡単化に寄与することができ、真に効果的で頑丈な撓み板波センサが達成できるとの知見に基づくものである。一実施例において、撓み板上の駆動歯を撓み板の全ての固有モードのピークと位置揃えする。
【0014】
本発明の撓み板波センサの一態様は、長さと幅とを有する撓み板、及びその撓み板中に励起される固有モードの数が少なくなるように撓み板の全長に亘り配置された駆動歯を有する撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。このセンサには、撓み板の全長に亘り駆動歯と交互配置(挟み込み配置)された感知歯を含めることができる。一例においては、感知歯を一方向に向け、駆動歯を反対方向に向ける。
【0015】
本発明の一実施例においては、撓み板中に単一の固有モードが励起されるように、櫛パターンを撓み板の全ての固有モードに対して位置揃えする。一設計例においては、櫛パターンによりセンサに単一の顕著なピークを出力させてセンサ性能を改善する。本発明の櫛パターンにより、単一のピーク又は他のピークより遥かに大きなピークとなるようにセンサの伝達関数を変換してもよい。好ましい実施例では、駆動歯を撓み板中に励起される固有モードと位置揃えすることができ、感知歯も撓み板中に励起される固有モードと位置揃えすることができる。典型的には、櫛パターンにより撓み板の圧電特性と協働して運動を起こさせる電界を発生させる。櫛パターンは、銅、チタニウム−白金−金(TiPtAu)金属、チタニウム−白金(TiPt)及びアルミニウムからなる群から選んだ材料製とすることができる。典型的には、櫛パターンを厚さ約0.1μmとし、櫛パターンにワイヤ結合パッド域及び接地用接点を含めることができる。一設計例においては、駆動歯を撓み板上に接触させ、感知歯を撓み板上に接触させる。理想的には、駆動歯を撓み板の全幅に亘り延在させ、感知歯を撓み板の全幅に亘り延在させる。
【0016】
撓み板波センサには、底基盤と、底基盤上に設けたエッチング停止層と、エッチング停止層上に設けた膜層と、底基盤及びエッチング停止層内に膜層の一部分が露出するように設けられ且つ実質上平行な内壁を有する空洞と、膜層上に設けた圧電層とを含め、櫛パターンを圧電層上に配置することができる。圧電層は、亜硝酸アルミニウム、酸化亜鉛、及びジルコニウム・チタン酸鉛からなる群から選んだ材料製とすることができる。典型的には、エッチング停止層を二酸化シリコン(SiO2)製とする。理想的には膜層をシリコン製とし、一例では底基盤をシリコン製とする。
【0017】
本発明の一設計例においては、底基盤にシリコン・オン・インシュレータ(SOI)ウェーハを含め、そのSOIウェーハにエッチング停止層に結合された膜層を形成する(エピタキシャル構造の)シリコン上側表面を含める。他の例では、エピタキシャル・シリコン上側表面上に圧電変換器を沈着させる。理想的には、圧電変換器内に開口をエッチングすることによりエピタキシャル・シリコンの接地用接点を設ける。一設計例においては櫛パターンにチタン−白金−金(TiPtAu)金属を含め、典型的には櫛パターンに櫛歯形状の金属電極、ワイヤ結合パッド領域、及び接地用接点を含める。一実施例においては、底基盤の厚さを約380μmとし、エピタキシャル・シリコン上側表面の厚さを約2μmとし、SiO2層の厚さを約1μmとし、櫛パターンの厚さを約0.1μmとする。駆動歯を長さ約300〜2000μmとし、駆動歯の相互間の間隔を約25〜50μmとすることができる。典型的には、感知歯を長さ約300〜2000μmとし、感知歯の相互間の間隔を約25〜50μmとする。
【0018】
本発明の撓み板波センサの他の態様は、長さと幅とを有する撓み板、及び撓み板中に励起される固有モードの数が少なくなるように撓み板の全長に亘り配置された駆動歯と感知歯とを有する撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。
【0019】
本発明の撓み板波センサの更に他の態様は、長さと幅とを有する撓み板、及び撓み板中に励起される固有モードの数が少なくなるように撓み板の全長に亘り配置された第1駆動歯の組と第2駆動歯の組とを有する撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。一実施例においては、撓み板波センサに、撓み板の全長に亘り配置された第1感知歯の組と第2感知歯の組とを含める。一典型例では、第1駆動歯組と第2駆動歯組とを相互に反対方向に向け、第1感知歯組と第2感知歯組とを相互に反対方向に向けることができる。一設計例では、第1駆動歯組と第2駆動歯組とを交互配置し、第1感知歯組と第2感知歯組とを交互配置する。交互配置した第1駆動歯組及び第2駆動歯組を撓み板の幅の約50%に亘り延在させ、交互配置した第1感知歯組及び第2感知歯組を撓み板の幅の約50%に亘り延在させる。他の典型例では第1駆動歯組と第2駆動歯組とを同一方向に向け、第1感知歯組と第2感知歯組とを同一方向に向けることができる。一設計例では、第1駆動歯組を第1感知歯組と交互配置し、交互配置した第1駆動歯組及び第1感知歯組を撓み板の幅の約50%に亘り延在させる。他の設計例では、第2駆動歯組を第2感知歯組と交互配置し、交互配置した第2駆動歯組及び第2感知歯組を撓み板の幅の約50%に亘り延在させる。
【0020】
本発明の撓み板波センサの更なる態様は、長さと幅とを有する撓み板、及び撓み板中に励起される固有モードの数が少なくなるように撓み板上に配置された第1駆動歯の組と第2駆動歯の組とを有し且つ第1駆動歯組を撓み板の全長の約75%に亘り延在させると共に第2駆動歯組を撓み板の全長の約25%に亘り延在させた撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。
【0021】
一実施例においては、撓み板上に配置された第1感知歯の組と第2感知歯の組とをセンサに含め、第1感知歯組を撓み板の全長の約75%に亘り延在させると共に第2感知歯組を撓み板の全長の約25%に亘り延在させ、第1感知歯組及び第2感知歯組を第1駆動歯組及び第2駆動歯組と交互配置する。一例においては、第1駆動歯組及び第2駆動歯組を一方向に向け、第1感知歯組及び第2感知歯組を反対方向に向ける。
【0022】
本発明の撓み板波センサの他の態様は、長さと幅とを有する撓み板、及び撓み板中に励起される固有モードの数が少なくなるように撓み板の全長の約50%に亘り配置された第1駆動歯の組と第2駆動歯の組とを有し且つ各駆動歯組をそれぞれ撓み板の一端部において撓み板のほぼ全幅に亘り延在させると共に撓み板の中心部において撓み板の中心に向けて湾曲させた撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。このセンサには、撓み板の全長の約50%に亘り配置された第1感知歯の組と第2感知歯の組とを含めることができ、各感知歯組をそれぞれ撓み板の一端部において撓み板のほぼ全幅に亘り延在させると共に撓み板の中心部において撓み板の中心に向けて湾曲させることができる。
【0023】
また本発明の撓み板波センサの他の態様は、長さと幅とを有する撓み板、及び撓み板中に励起される固有モードの数が少なくなるように撓み板上に配置された駆動歯と感知歯とを有し且つ駆動歯を撓み板の全長の約50%に亘り延在させると共に感知歯を撓み板の全長の約50%に亘り延在させた撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。
【0024】
本発明の撓み板波センサの更に他の態様は、長さと幅とを有する撓み板、及び撓み板中に励起される固有モードの数が少なくなるように撓み板上に配置された駆動歯の組と感知歯の組とを有し且つ駆動歯組を撓み板の全長の約50%に亘り延在させると共に感知歯組を撓み板の全長の約50%に亘り延在させた撓み板上の櫛パターンを備え、その櫛パターンによりセンサの操作及び設計を簡単化することを特徴とする。
【0025】
また本発明は撓み板波センサの製造方法を提供するものでもあり、その一方法は、基板上にエッチング停止層を堆積するステップ、エッチング停止層上に膜層を堆積するステップ、膜層上に圧電層を堆積するステップ、圧電層上に圧電層の全長に亘り延在する駆動歯付きの櫛パターンを形成するステップ、基板を貫通し且つ実質上平行な内壁を有する空洞をエッチングするステップ、及びエッチング停止層の空洞と膜層との間の部分を除去して膜層の一部分を露出させるステップを含むことを特徴とする。その方法には、圧電層に孔をエッチングしてシリコン膜層上に接地用接点を形成する1以上のステップを含めることができる。
【0026】
更に本発明による撓み板波センサの他の製造方法は、基板上にエッチング停止層を堆積するステップ、エッチング停止層上に膜層を堆積するステップ、膜層上に圧電層を堆積するステップ、圧電層上に膜層の全長に亘り延在する駆動歯及び感知歯付きの櫛パターンを第1変換器として形成するステップ、圧電層上に第1変換器から間隔を隔てて第2変換器を形成するステップ、基板を貫通し且つ実質上平行な内壁を有する空洞をエッチングするステップ、エッチング停止層の空洞と膜層との間の部分を除去して膜層の一部分を露出させるステップ、及び露出された膜層の一部分上に吸収性コーティングを堆積するステップを含むことを特徴とする。
【0027】
本発明による撓み板波センサの製造方法には、圧電層に孔をエッチングしてシリコン膜層上に接地用接点を形成する1以上のステップを更に含めることができる。
【0028】
本発明の他の目的、特徴及び利点は、好ましい実施例に関する以下の説明及び図面から当業者には明らかになるであろう。
【発明を実施するための最良の形態】
【0029】
本発明は、好適実施例又は以下に説明する実施例以外にも他の実施例が可能であり且つ各種態様で実施又は実現することができる。従って本発明は、以下に説明し又は図示する構造及び配置の細部の応用例に限定されるものではない。
【0030】
図1は従来の撓み板波センサ10を示す。背景技術欄で説明したように従来の撓み板波センサ10は、駆動歯16及び18付きの駆動櫛パターン14と駆動歯22及び24付きの駆動櫛パターン20とを有する。典型的には駆動櫛パターン14と駆動櫛パターン20とを逆極性で駆動し、例えば駆動櫛パターン14を正極性で駆動すると共に駆動櫛パターン20を負極性で駆動することにより、固有モードの正ピーク及び負ピークと位置揃えする。
【0031】
図1に示すように、撓み板38上の駆動櫛パターン14及び20の設置長さは、撓み板38の全長の僅か約25%〜40%に過ぎない。駆動櫛パターン14及び20の長さが制限されているので、駆動歯の数すなわち駆動歯16、18、22、24の数も限られている。背景技術欄で説明したように、撓み板38の固有モードのピークの数に比し駆動歯の数が少ないと複数個の固有モードが励起される。
【0032】
例えば図2は、図1の撓み板38の縦固有モードのモード変位(modal displacement)を、モード数n=20の場合とn=21の場合について示したものである。ここにモード数nとは、近似的に板38上に現れる半正弦周期の数(n≒正弦周期/2)である。図2が示すように、固有モードのピーク39(n=20の場合)及び41(n=21の場合)の数に比して駆動歯16、18、22及び24の数は明らかに少ない。その結果、矢印43、45、49及び51で示すように、単にn=20の固有モードが被励起駆動歯16、18、22及び24と完全に位置揃えされるだけでなく、他の固有モードも励起される。被励起固有モードの数の増加は、図3Aのピーク60、62、64及び66に示すような一連の類似振幅の共振ピークの列、及び図3Bに示すような異常位相(irregular phase)を生じさせる。
【0033】
図1の従来のセンサ10も、典型的には駆動櫛パターン14及び26から見て撓み板38の反対側端縁に設けた感知櫛パターン26及び32を有し、両感知櫛パターン26、32はそれぞれ感知歯28、30及び34、36を有する。背景技術欄で説明したように、従来センサ10が依存する表面弾性波(SAW)の理論は、波が図4の矢印50で示すように駆動櫛パターン14及び20から感知櫛パターン26及び32へ伝搬するとし、反射戻りを干渉とみなしている。しかし、SAW理論に依存したのでは、センサ10によって生じる多数の小ピークを説明することができず、利得の計算値が小さくなり鋭い位相減少を説明できない。
【0034】
対照的に図5に示す本発明の撓み板波センサは、長さと幅とを有する撓み板72上に櫛パターン74を設けた撓み板波センサ70において、櫛パターン74に撓み板72の全長に亘り取付けた駆動歯76を含めることにより、撓み板72の中に励起される固有モードの数を少なくする。一設計例においては、櫛パターン74を撓み板72の全ての固有モードと位置揃えする。好ましい実施例では、1つの固有モードのみを励起する。その結果として撓み板波センサ70は、例えば図6Aのピーク80のような単一の大きなピークを図6Bに示す明確な位相で出力するか、又は図7Aに示すように他の諸ピーク84、86より遥かに大きく顕著な単一の大きなピーク82を図7Bの矢印89で示す明確な位相で出力する。これは、従来技術による図3A及び図3Bの類似振幅のピーク群及び不規則位相に対して極めて対照的である。その結果は、図5の撓み板波センサ70の操作及び設計の重要な簡単化である。以下に説明する本発明の閉ループ電子装置の設計は単一モードにおいてのみ励起することが可能であって、(図3A及び図3Bに示される)他の固有モードから飛出すモードが作る干渉に起因する読取値の錯誤をなくし、それによってシステムの安定度を向上させる。
【0035】
本発明の一設計例においては、図5に示すように、撓み板72の全長に亘り配置した感知歯78を撓み板波センサ70に設ける。一実施例においては、感知歯78と駆動歯76とを反対方向に向ける。図示例では感知歯78と駆動歯76とが交互配置(挟み込み配置)されている。典型的には、撓み板72中に励起される固有モードに対して感知歯78を位置揃えし、作られた出力を駆動歯76により検出する。
【0036】
本発明の一実施例では、櫛パターン74を銅製とする。他の例では、櫛パターン74をチタニウム−白金−金(TiPtAu)、チタニウム−白金(TiPt)、アルミニウムその他の任意の既知材料又は当業者に知られた材料製とする。典型的な櫛パターン74は厚さ約0.1μmであり、図5に示すようにワイヤ結合パッド域80a、82aを有する。
【0037】
撓み板波センサ70は、典型的には図8に示すように複数の層からなる。典型的なセンサ70は、厚さ380μmのシリコン製の底基板100、及び基板100上に設けた理想的には厚さ1μmの二酸化シリコン(SiO2)製エッチング停止層102を含む。また理想的にはセンサ70に、エッチング停止層102上に設けたシリコン又は同様な材料製の膜層104と、空洞106とを含める。典型的には、シリコンを成長させて膜層104(例えばダイヤフラム層)を形成する。空洞106は実質上平行な内壁面を有し、底基板100及びエッチング停止層102内に膜層104の一部分が露出するように設ける。一実施例では、厚さ0.5μmの圧電層108を膜層104上に設ける。その圧電層108上に、駆動歯76及び感知歯78を有する櫛パターン74(図5参照)を配置する。典型的には膜層104を大地(図示せず)に接続する。理想的には圧電層108を窒化アルミニウム、酸化亜鉛、及びジルコン・チタン酸鉛等の材料製とする。
【0038】
他の設計例は、底基板100をシリコン・オン・インシュレータ(SOI)ウェーハとし、エッチング停止層102に結合した(エピタキシャル構造の)シリコン上側表面(すなわち膜層104)を含む。理想的には、圧電層108内へのエッチング穿孔によって、シリコン層(例えば膜層104)の接地用接点を設ける。好ましい実施例では、チタン−白金−金又はチタン−白金の金属材料のパターン成形により、圧電層108(図8参照)の全長に亘って延びる駆動歯76及び感知歯78付きの櫛パターン74(図5参照)を形成する。理想的には、櫛パターン74にワイヤ結合パッド80a、82a(図5参照)及び接地用接点(図示せず)を含めて形成する。駆動歯76及び感知歯78を長さ300〜2000μmとし、駆動歯76と感知歯78との間の間隔を約25〜50μmとする。
【0039】
以上説明したように、撓み板72の全長に亘り配置された駆動歯76を有する撓み板波センサ70における櫛パターン74の独特な設計は、撓み板72中に励起される固有モードの数を有効に減少させ、且つ、単一の著しいピーク又はセンサ70からの出力中の他の何れのピークより遥かに大きいピークを出力する。その結果として、撓み板波センサ70の操作及び設計を簡単化することができる。
【0040】
独特な櫛パターン74には幾つかの形態が可能であり、例えば、それぞれ撓み板72の全長に亘って延びると共に幅の約50%に亘って延びる交互配置の駆動歯の組と交互配置の感知歯の組とからなる形態(図9参照)、それぞれ撓み板72の全長に亘って延びると共に幅の約50%に亘って延びる交互配置の駆動歯・感知歯の組の2組からなる形態(図10参照)、撓み板72の全長の約75%に亘って延びる交互配置の駆動歯・感知歯の1組と撓み板72の全長の約25%に亘って延びる交互配置の駆動歯・感知歯の他の1組とからなる形態(図11A参照)、及び独特な湾曲形状の駆動歯・感知歯の組からなる形態(図12参照)である。当業者は、他の同等な実施例に容易に想到することができるであろう。
【0041】
図9の櫛パターン74iは、撓み板72の全長に亘り配置された第1駆動歯組120と第2駆動歯組124とを含む。この櫛パターン74iには撓み板72の全長に亘り配置された第1感知歯組128と第2感知歯組130とを含めることができ、これらを第1駆動歯組120及び第2駆動歯組124によりもたらされる出力の感知のために用いることができる。図示例では第1駆動歯組120を負極性で駆動すると共に第2駆動歯組124を正極性で駆動するが、これは撓み板72の固有モードの負及び正のピークに位置揃えするためであり、励起される固有モードの低減を助けるためである。同様にして、第1感知歯組128を正極性で駆動し、第2感知歯組130を負極性で駆動する。第1駆動歯組120と第2駆動歯組124とは反対方向に向け、互いに挟み込んで交互配置する。同様にして、第1感知歯組128と第2感知歯組130とを反対方向に向け、互いに挟み込んで交互配置する。この設計では、第1駆動歯組120と第2駆動歯組124との両者が交互配置されると共に、撓み板72の全長に亘り配置され且つ撓み板72の幅の約50%に亘って延びる。同様にして、第1感知歯組128と第2感知歯組130との両者が交互配置されると共に、撓み板72の全長に亘り配置され且つ撓み板72の幅の残余の約50%に亘って延びる。この設計の櫛パターン74iは、単に励起される固有モードの数を減らすだけでなく、センサ70の出力におけるピークの数の減少に貢献する。
【0042】
図10に示す本発明の他の実施例では、上述した櫛パターン74iの設計を、第1駆動歯組が第1感知歯組と交互配置するように修正している。同図に示す櫛パターン74iiは、交互配置する第1駆動歯組131と第1感知歯組132とを含む。交互配置された第1駆動歯組131と第1感知歯組132とは、撓み板72の全長に亘り配置され且つ撓み板72の幅の50%に亘り延びる。図示例の櫛パターン74iiは交互配置する第2駆動歯組134及び第2感知歯組136をも含み、それらも同様に撓み板72の全長に亘り配置され且つ撓み板72の幅の50%に亘って延びる。典型的には、両駆動歯組(例えば駆動歯組131及び134)を反対極性で駆動し、両感知歯組(例えば感知歯組132及び136)を反対極性で駆動する。上述した図9の設計と同様に図10の設計も、単に励起される固有モードの数を減らすだけでなく、センサ70に励起されるピークの数を減少させる。
【0043】
図11Aに示す設計では、櫛パターン74iiiが第1駆動歯組150と第2駆動歯組152とを含む。第1駆動歯組150は撓み板72の全長の約75%に亘って延び、第2駆動歯組152は撓み板72の全長の約25%に亘って延びる。また櫛パターン744iiiは、撓み板72の全長の約75%に亘って延び且つ第1駆動歯組150と交互配置される第1感知歯組154と、撓み板72の全長の約25%に亘って延び且つ第2駆動歯組152と交互配置される第2感知歯組156を含む。この設計も撓み板72中に励起される固有モードの数を減少させる。
【0044】
図11Bに示す他の設計では、櫛パターン74ivが撓み板72上に配置された駆動歯170と感知歯172とを含む。矢印174で示すように駆動歯170は撓み板72の全長の約50%に亘って延び、矢印176で示すように感知歯172も撓み板72の全長の約50%に亘って延びる。この櫛パターン74ivも同様に撓み板72中に励起される固有モードの数を減らす。
【0045】
この設計の櫛パターン74ivには、駆動歯170及び駆動歯171を有する駆動歯組173を含めることができる。矢印174で示すように、駆動歯組173は撓み板72の全長の約50%に亘って延ばす。またこの設計の櫛パターン74ivには、感知歯172及び感知歯177を有する感知歯組175を含めることができる。矢印176で示すように、知歯組175も撓み板72の全長の約50%に亘って延ばす。この様な設計においても同様に、撓み板72中に励起される固有モードの数を減らすことができる。図11Bでは駆動歯組173を駆動歯170と駆動歯171との交互配置により構成し、感知歯組175を感知歯172と感知歯177との交互配置により構成しているが、これは本発明の限定条件ではなく、駆動歯(例えば駆動歯170又は駆動歯171)を感知歯(例えば感知歯172又は感知歯177)と交互配置してもよい。
【0046】
図12に示す本発明の更に他の設計では、櫛パターン74vが撓み板72の全長の約50%に亘り配置される第1駆動歯の組160及び第2駆動歯の組162を含む。第1駆動歯組160及び第2駆動歯組162の輪郭は、撓み板72の一端部において撓み板72のほぼ全幅に亘り延在し且つ撓み板72の中心164に向けて縮小傾向に湾曲する。この櫛パターン74vの独特な設計は、撓み板72中に励起される固有モードの数の低減及びセンサ70の出力中のピークの数の減少に貢献する。櫛パターン74vには、第1駆動歯組160及び第2駆動歯組と類似輪郭形状を有し且つ交互配置された第1感知歯組166及び第2感知歯組168を含めることができる。
【0047】
本発明の撓み板波センサ70の製造方法は、図13に示すように、図8の基板100上にエッチング停止層102を堆積するステップ200、図8のエッチング停止層102上に膜層104を堆積する(例えば付加的にシリコンを成長させる)ステップ202、図8の膜層104上に圧電層108を堆積するステップ204、図8(及び図5、図9〜図11)の圧電層108の全長又はその一部分に亘り延在する駆動歯76付き櫛パターン74を形成するステップ206、及び基板100を貫通するように図8の空洞106をエッチングして空洞106と膜層104との間で膜層104を部分的に露出させるステップ208を含む。他の例においては、基盤100として、予め結合された酸化物層(例えばエッチング停止層102)とシリコンダイヤフラム層(例えば膜層104)とを含むシリコン−オン−インシュレータ(SOI)を用いる。
【0048】
以上説明したように本発明による丈夫な撓み板波センサ70は、撓み板72中に励起される固有モードの数が減少するように撓み板72の全長に亘り配置された複数の独特な構成要素からなる櫛パターンを有し、その櫛パターンにより撓み波板の操作及び設計を簡単化するものである。撓み波板の全長に亘り延在する駆動歯を有する独特の櫛パターンは、櫛パターン自体が撓み波板の固有モードとの位置揃えの機能を与える。その結果として、撓み板波センサ70は単一の顕著なピーク又は他のピークより遥かに大きなピークを発生することができ、撓み板波センサ70の高い安定性と改良された性能と設計の簡単化とが達成される。
【0049】
背景技術欄で述べたように、従来の撓み板波センサ10(図1参照)は、撓み板の両端縁に設けた駆動櫛パターン14、20と感知櫛パターン26、32とを用いる。従来のセンサ10は表面弾性波(SAW)の類推の基づく理論に依存しているが、その理論では、図4に示すように波が駆動櫛パターン14、20から感知櫛パターン26、32へ伝播し、戻り反射は干渉とみなされる。
【0050】
本発明者らは、この種の表面弾性波(SAW)の類推は大部分の撓み板波装置では不正確であることを見出した。とくに図14及び図9〜図11に示すような単純端縁条件(simple edge conditions)の設計の撓み板は、実際には共振板として振舞う。以下の式(1)〜(14)の解析は、撓み板302(図14参照)を細いビーム(梁)としたモデルに基づくものである。撓み板302の固有振動数の計算と製品の性能との比較によれば、このビーム・モデルは図14及び図9〜図11のセンサ70に対してだけでなく撓み板(共振板)302及びセンサ300に対しても有効である。後述する式(16)及び式(17)を用いれば、単純なビーム・モデルを拡張して撓み板302の厚さ方向の付加的モードを考察することもできる。
【0051】
図14を参照するに、撓み板302を含む撓み板波センサ300の駆動電圧はゼロ基準となるセンター接地の変圧器304に印加され、その変圧器により撓み板波センサ300の一方の電極に+VDを印加し、他方の電極に−VDを印加する。変圧器304の入力側は大地306とVDとに接続する。出力側をセンタ・タップすることにより両端を+VD及び−VDとする。本発明の他の実施例では、例えば当業者に周知のピアス(Pierce)又は直列発信器等の駆動回路を出力として用いたワンポート操作を採用することができる。駆動対は、例えば+VD及び−VDである電極対又は駆動櫛パターン350及び352である2つの電極を有する。感知対は、例えば電極又は感知櫛パターン354及び356である2つの電極又は感知櫛パターンを有し、典型的にはそれらをそれぞれ例えば差動増幅器355及び357である差動増幅器の入力端対に接続する。一設計例においては、例えば電極又は櫛パターン350、352、354及び356である全ての電極を撓み板302の圧電層(図示せず)の頂面に堆積する(上述した図8の撓み板波センサ70の設計と同様である)。図14のシリコン層309は典型的には大地306に接続する。
【0052】
固有モードと撓み板電圧との関係を以下に示す。次の式(1)の誘導は非特許文献1に開示されており、これを引用により本明細書に含める。以下の諸方程式は、図14に示すz方向の細いビームの振動に基づく。任意位置の変位z(t)は式(1)で与えられ、各機械的モードにおける運動方程式は式(2)となる。
【0053】
式(1)及び式(2)において、φn(x)は式(2a)に示すように作り付けダイヤフラム端縁に対する固有モード波形(式(2a)の右辺)にほぼ等しく、単純支持端縁に対しては式(2b)となる。作り付け端縁に対する固有値λnは式(2c)であり、単純支持の端縁に対する固有値λnは式(2d)である。nは撓み板の長さL中における半波長の数に等しい正の整数、Lは撓み板の長さである。mpは単位長さ当たりの質量、bは単位長さ当たりの減衰(damping)、Anは励起されたn番目のモード運動の振幅、fn(t)はモードnに対する強制関数(forcing function)である。
【0054】
単純支持及び作り付け支持に対して、共振角周波数ωnと波数λとの間には式(3)の関係がある。ここにDは剛性である。
【0055】
式(4)のモード波形φn(x)が与えられたと仮定し、φ=0のピン止めしたビームを仮定する。モードの数が多いので、ピン止めしたビームは作り付けビームとほとんど変わらない。更に、ビームを式(5)による第1高調波を有する力密度w(x,t)で駆動したと仮定する。式(5)においてwnは式(5a)で表され、Mpは電極へ印加される1ボルト当たりの圧電トルクの大きさであり、VDは駆動歯352(図14参照)に印加される電圧であり、λtは櫛パターン(変換器)の長さ=mP/2(Pは櫛パターンの歯のピッチ、mは変換器中の歯の数又は長さL中の半サイン(half sine)の数)である。θは櫛パターンの各歯と基準との間のアラインメント(alignment)である。
【0056】
式(2)、式(4)及び式(5)を用いて、式(6)のようにモード強制関数(modal forcing function)fn(t)を求めることができる。式(6)においてx0は櫛の始点であり、x0+λtはその終点である。式(6)から、入力電圧VDに対するモード力fnの比に関連付けて、γnが式(7)のように定義される。式(7)は駆動歯及び感知歯の両者の電極、すなわち駆動歯350、352及び感知歯354、356からなる櫛パターン対349(又は図5及び図9〜図12の何れかの設計)に適用することができる。積分は、櫛パターンが力を及ぼす範囲、すなわち変換器の長さλt(図11Aのl)全体に対して行われる。単純支持ではφがゼロに等しい。γの単位はm/Vであり、γは(1/λn)4に比例する。櫛パターンとモードとの位置揃えがされたとき、θがゼロとなり、強制関数は式(8)のようになる。
【0057】
図15A〜図15Cは、変換器の長さを0.00125mとし、図14の撓み板302の長さを0.005mとし、櫛の歯の数mを50mμピッチで50とした場合に、位相θ=0、π/2、π/4におけるモード振幅応答fn(t)/[wasin(ωt)]の値を示す。固有モードの波長が櫛ピッチとマッチするときに、撓み板波センサ300の最大強制が得られる。
【0058】
本発明によれば、駆動長さ、すなわち撓み板波センサ300の駆動歯352を有する櫛パターン(図5及び図9〜図11の設計を含む)の長さが撓み板302の全長に亘って延在するに足りる場合は、x方向において単一モードのみが励起され、簡単な二階(second order)システムとなり、図6Aに示すように単一の顕著なピークを出力する。更に櫛の長さと歯の幅を変えることにより、高調波の原因となるy方向関数の圧電曲がりを抑制することができ、y方向の正弦波状高調波が励起しないようにすることができる。
【0059】
式(8)において、長さw(x,t)当たりの力はその第一次高調波で代表した。式(6)のモード強制関数fn(t)は式(8a)を含む分母の項により支配されるので、w(x,t)の高次高調波は大きな値のmを有し、式(8)に対する貢献がほとんどない。
【0060】
ビーム・モードを出力に結合するため、図14の撓み板302上での歪から電荷への変換を用いる。撓み板302が接地されていると仮定すれば、単位長さ当たりの表面電荷Qxは式(9)のように記述される。式(9)において、d31はz方向電界をx方位歪に関連付ける圧電定数であり、Yは圧電材料のヤング率であり、νpはポアソン比であり、bはダイヤフラムの幅である。
【0061】
式(1)及び式(4)を用いることにより、圧電材料の中央部におけるピーク歪εPとモード振幅との関係は式(10)のように示される。式(10)において、Δzmは圧電材料の面積中心とトルク入力に対する撓み板の中性軸との間の距離であり、Rはその位置での曲率半径である。
【0062】
全電荷は、式(9)を電極群(すなわち図14の櫛パターン350及び352)全体に対して積分することにより算出する。式(10)中に正弦関数であるので、この積分はフーリエ変換に類似しており、式(11)のように板分布(plate distribution)の第一次高調波を考慮することが容易である。
【0063】
式(11)に式(9)及び式(10)を代入することにより、駆動電極又は感知電極(例えば駆動櫛パターン350及び352、又は感知櫛パターン354及び356)上の全電荷Qを式(12)のように表すことができる。式(12)において、モード振幅Anと電荷Qとの結合係数αnは式(13)で与えられる。
【0064】
式(13)の括弧内の積分は式(7)のモード力の計算に用いたものと同一である。αnの単位はクーロン/メートルであり、αnはλn2に比例する。
【0065】
圧電ダイヤフラム・モデルを他の電気回路素子付きの集中パラメータ・モデルへ次のように組み込む。例えば典型的な圧電櫛の組349は、2つの電極350及び352と接地面306とを有する。単一モードに対して、モード振幅変位Anと電極電位用の電荷Qとモード力fnとを関連付ける静止的方程式は式(14)のように表される。式(14)において,Cは一枚の板から大地への静電容量、C12は正及び負の電極間の静電容量、αn及びγnは式(13)及び式(7)で定義した圧電結合係数、knはモード硬さ(modal stiffness)、D1は駆動櫛パターン350のような正の駆動電極、D2は駆動櫛パターン352のような負の駆動電極をそれぞれ表す。αn及びγnに付した負の符号は、負の電極が正の電極から180度離れて配置されることを示す。式(15)に示すように、負の櫛パターンに印加される電圧は、正の櫛パターンに印加される電圧のマイナス符号である。
【0066】
式(14)において暗示された些細な結合仮定により、撓み板に印加される電圧及び電流はなお方程式(9)〜式(13)で表される。式(14)の誘導の結果はQD2=−QD1となり、図14の回路図と一致している。QD1は上に定義した電流I2の積分である。読み取れる対称性と差分とから式(16)が導かれる。
【0067】
式(16)を整理すると式(17)のようになる。
【0068】
回路抵抗器を加える時に、Qは式(16)に示した2つの電流からなる。式(16)及び式(17)は駆動電極及び感知電極の両者の対を示している。
【0069】
電荷とは電極上の全体を合算した全電荷であり、力とはビームに沿った単位長さ当たりの力であるモード力である。モード周期が櫛パターン周期と一致する場合は式(18)が成立し、その場合は櫛パターンと固有モードとが位置揃えされ(すなわちθが式(7)のφと等しくなり)、式(19)に示すように圧電式(17)が相反形式(form of reciprocity)に従う。この相反則は、電圧、モード力、長さあたりの電荷、及びモード振幅の間の対称性を表している。櫛パターンと固有モードとの位置揃えがされていない場合は、式(19)が成立しない。
【0070】
以上の結果が本発明による包括的・動的な撓み板波センサに組み込まれ、励起電圧と前置増幅器の出力とを関連付ける。以下の例では簡明のため3つのモードのみを含めているが、これは本発明に必要な制限条件ではなく、図3A、図3B、図6A、図6B、図7A及び図7Bに示すように当業者は任意数のモードを含めることができる。上述したように電荷は正及び負の電極の両者を含む。圧電材料に直接印加される電圧及び力は式(20)のように示される。
【0071】
圧電材料に直接印加される力は式(21)のように表され、図14の駆動櫛パターン350に印加される電圧は式(22)である。式(22)において、Vは電源から印加される電圧であり、RDは入力抵抗である。
【0072】
出力側の前置増幅器が実質上大地であると仮定すると、感知電圧は式(23)で与えられる。式(23)において、RSは感知抵抗である。除数2は、正および負の電極を含む式(15)におけるQの定義を考慮したものである。周波数応答を得るための式(20)〜式(23)に対するMATLAB(登録商標)によるコーディング例を図16A〜図16Cに示す。
【0073】
非特許文献2は、例えば図14の撓み板302のような矩形板によるx及びy方向の固有モードの一次近似として、ビーム理論により導いたものを教示している。変位は、x方向のシヌソイド(sinusoid)にy方向のシヌソイドを乗算したものである。四方端縁を作り付け又は単純支持した等方性又は直交異方性の矩形板の場合は、固有周波数群(ヘルツ単位)の近似が式(24)で与えられる。式(24)において、nは長さに沿ったモード数であり、mは幅に沿ったモード数であり、λは板の長さ(例えば0.005m)であり、bは板の幅(例えば0.001m)である。G(n)は、単純支持の場合はnに等しく、全端縁作り付けの場合は(n+1)/2に等しい。J(n)は、単純支持の場合はn2に等しく、全端縁作り付けの場合は式(24a)に等しい。Yはヤング率であり、hは板厚であり、maは単位面積当りの質量である。
【0074】
単純支持板の場合は、式(24)は式(25)のようになる。
【0075】
名目上の例として、m=0で単純支持した場合に対する相対的固有振動数とモード数nとの関係を図17に示す。λ/b=5に対するものである。式(24)及び式(25)は、m=0の場合のビーム理論を再現したものである。作り付けの場合の固有周波数は、単純支持の場合よりも0.50%高い。m=1でn=200の場合、m=0の単純ビームの場合よりも、作り付けの共振周波数が0.085%高い。このm=1の周波数がビーム理論値に近く、基本的動作周波数である。図18に示すように、変位はm=1の場合のモード波形に近い。モード数mがより高次である場合は、y(短い)方向の半サインの数がより多くなる。m=2のとき、次の共振は基本的動作周波数(m=1)より0.21%高くなる。一直線の歯群を用いた場合、奇数高調波が励起されるが、(製作上のずれを除き)励起すべきでない。作り付けの場合、m=3の共振は基本波より0.6%高くなる。y方向では励起が方形であるにも拘らず、図18に示すように、固定したx方向に沿う応答はほとんどシヌソイド的である。方形駆動を用いると駆動の第3高調波は基本波の1/3である。図3Aは、従来のセンサ10において諸モードと交差するギザギザを示す。これとは極めて対照的に、本発明による図5、図9〜図11の撓み板波センサ70及び図14の撓み板波センサ300は、撓み板の全長に亘って延びる独特の櫛パターンを有するので、図6A及び図6Bに示すように単純で顕著なビーク又は他の諸ピークより遥かに大きなピークを、図7A及び図7Bに示すように明確な位相で発生する。
【0076】
本発明の特定の特徴を一部の図面に示し他の図面に示さなかったが、これは専ら便宜上のことであり、本発明においては何れの特徴をも他の何れか又は全ての特徴と組み合わせることができる。本文における「含み(including)」、「からなり(comprising)」、「有し(having)」及び「付き(with)」の語は広義且つ包括的に解釈し何れかの物理的関連に限定されないものとする。更に、本出願に記載した何れの実施例も単なる可能な実施例と捉えないものとする。当業者は、本発明の特許請求の範囲の枠内で他の実施例に想到することができるであろう。
【図面の簡単な説明】
【0077】
【図1】撓み板の約25%〜50%に亘り配置した駆動櫛及び感知櫛を有する従来技術の撓み板波センサの頂面図である。
【図2】図1のセンサの櫛パターンに対する複数の変位固有モードの関係を示すグラフである。
【図3A】図1のセンサの典型的出力を示すグラフである。
【図3B】図3Aに示されるピークに対する不規則的な位相応答を示すグラフである。
【図4】図1のセンサの波伝搬方向を示す図式的側面図である。
【図5】本発明による撓み板波センサの一実施例の図式的頂面図である。
【図6A】図5に示す撓み板波センサによる単一の大きなピーク出力を示すグラフである。
【図6B】図6Aに示すピークに対する明確な位相応答を示すグラフである。
【図7A】図5に示す撓み板波センサによる複数振幅の出力中の数個の大きなピーク出力を示す他のグラフである。
【図7B】図7Aに示す諸ピークに対する明確な位相応答を示すグラフである。
【図8】本発明による撓み板波センサにおける各種層を示す図式的側面図である。
【図9】本発明による撓み板波センサにおける櫛パターンの他の実施例を示す図式的頂面図である。
【図10】本発明による撓み板波センサにおける櫛パターンの他の例を示す図式的頂面図である。
【図11A】本発明による撓み板波センサにおける櫛パターンの他の設計を示す図式的頂面図である。
【図11B】本発明による撓み板波センサにおける櫛パターンの更に他の設計例を示す図式的頂面図である。
【図12】本発明による撓み板波センサにおける櫛パターンの更なる他の設計例を示す図式的頂面図である。
【図13】本発明による撓み板波センサの一製造方法に係る主要な諸過程を示す流れ図である。
【図14】本発明による撓み板波センサの一実施例に関連する図式的回路図である。
【図15A】本発明による撓み板波センサの出力を例示するグラフの一例である。
【図15B】本発明による撓み板波センサの出力を例示するグラフの他の一例である。
【図15C】本発明による撓み板波センサの出力を例示するグラフの更に他の一例である。
【図16A】本発明の撓み板波センサの一実施例の三モード周波数応答に対するMATLABのコーディングリストの先頭部分である。
【図16B】図16Aに続くMATLABのコーディングリストの一部分である。
【図16C】図16Bに続くMATLABのコーディングリストの一部分である。
【図16D】図16Cに続くMATLABのコーディングリストの一部分である。
【図16E】図16Dに続くMATLABのコーディングリストの一部分である。
【図16F】図16Eに続くMATLABのコーディングリストの最終部分である。
【図17】本発明の撓み板波センサの一実施例の相対的固有周波数を示すグラフである。
【図18】本発明の撓み板波センサへの正弦波形負荷に対する板の静的歪みを示すグラフである。
【符号の説明】
【0078】
10、70、300…撓み板波センサ
14、20、350、352…駆動櫛パターン
16、18、22、24、76、170、171…駆動歯
26、32、354、356…感知櫛パターン
28、30、34、36、78、172、177…感知歯
38、72、302…撓み板
39、41…固有モードのピーク
43、45、49、51…他の固有モード
50…(波の方向を示す)矢印、
60、62、64、66…類似振幅の共振ピーク
74、74i、74i、74iii、74iv、74v…櫛パターン
80…単一ピーク
80a、82a…ワイヤ結合パッド域
82…他のピークより遥かに大きなピーク
84、86…他のピーク
89…(明確な位相を示す)矢印
100…底基板
102…ETTINGワイヤ結合パッド域
104…膜層
106…空洞
108…圧電層
120、131、150、160…第1駆動歯組
124、134、152、162…第2駆動歯組
128、132、154、166…第1感知歯組
130、136、156、168…第2感知歯組
164…中心
173…駆動歯組
174、176…矢印
175…感知歯組
200、202、204、206、208…ステップ
304…中央接地変圧器
306…大地
309…シリコン層
349…(圧電)櫛対
355、357…差動増幅器
【特許請求の範囲】
【請求項1】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板の全長に亘り配置された駆動歯を有する撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項2】
請求項1のセンサにおいて、前記撓み板の全長に亘り駆動歯と交互配置された感知歯を含めてなる撓み板波センサ。
【請求項3】
請求項2のセンサにおいて、前記感知歯を一方向に向け、前記駆動歯を反対方向に向けてなる撓み板波センサ。
【請求項4】
請求項1のセンサにおいて、前記櫛パターンを、前記撓み板中に単一の固有モードが励起されるように撓み板の全ての固有モードに対して位置揃えしてなる撓み板波センサ。
【請求項5】
請求項1のセンサにおいて、前記櫛パターンにより、前記センサに単一の顕著なピークを出力させてセンサ性能を改善してなる撓み板波センサ。
【請求項6】
請求項1のセンサにおいて、前記櫛パターンにより、前記センサの伝達関数を単一のピーク又は他のピークより遥かに大きなピークとなるように変換してなる撓み板波センサ。
【請求項7】
請求項1のセンサにおいて、前記駆動歯を、前記撓み板中に励起される固有モードと位置揃えしてなる撓み板波センサ。
【請求項8】
請求項2のセンサにおいて、前記感知歯を、前記撓み板中に励起される固有モードと位置揃えしてなる撓み板波センサ。
【請求項9】
請求項1のセンサにおいて、前記櫛パターンにより、前記撓み板の圧電特性と協働して運動を起こさせる電界を発生してなる撓み板波センサ。
【請求項10】
請求項1のセンサにおいて、前記櫛パターンを銅製としてなる撓み板波センサ。
【請求項11】
請求項1のセンサにおいて、前記櫛パターンを、銅、チタニウム−白金−金(TiPtAu)金属、チタニウム−白金(TiPt)及びアルミニウムからなる群から選んだ材料製としてなる撓み板波センサ。
【請求項12】
請求項1のセンサにおいて、前記櫛パターンをアルミニウム製としてなる撓み板波センサ。
【請求項13】
請求項1のセンサにおいて、前記櫛パターンの厚さを0.1μmしてなる撓み板波センサ。
【請求項14】
請求項1のセンサにおいて、前記櫛パターンにワイヤ結合パッド域及び接地用接点を含めてなる撓み板波センサ。
【請求項15】
請求項1のセンサにおいて、前記駆動歯を撓み板上に接触させてなる撓み板波センサ。
【請求項16】
請求項2のセンサにおいて、前記感知歯を撓み板上に接触させてなる撓み板波センサ。
【請求項17】
請求項1のセンサにおいて、前記駆動歯を撓み板の全幅に亘り延在させてなる撓み板波センサ。
【請求項18】
請求項2のセンサにおいて、前記感知歯を撓み板の全幅に亘り延在させてなる撓み板波センサ。
【請求項19】
請求項1のセンサにおいて、底基盤と、底基盤上に設けたエッチング停止層と、エッチング停止層上に設けた膜層と、底基盤及びエッチング停止層内に膜層の一部分が露出するように設けられ且つ実質上平行な内壁を有する空洞と、膜層上に設けた圧電層とを含め、前記櫛パターンを圧電層上に配置してなる撓み板波センサ。
【請求項20】
請求項19のセンサにおいて、前記圧電層を亜硝酸アルミニウム、酸化亜鉛、及びジルコニウム・チタン酸鉛からなる群から選んだ材料製としてなる撓み板波センサ。
【請求項21】
請求項19のセンサにおいて、前記エッチング停止層を二酸化シリコン(SiO2)製としてなる撓み板波センサ。
【請求項22】
請求項19のセンサにおいて、前記膜層をシリコン製としてなる撓み板波センサ。
【請求項23】
請求項19のセンサにおいて、前記底基盤をシリコン製としてなる撓み板波センサ。
【請求項24】
請求項23のセンサにおいて、前記底基盤にシリコン・オン・インシュレータ(SOI)ウェーハを含めてなる撓み板波センサ。
【請求項25】
請求項24のセンサにおいて、前記シリコン・オン・インシュレータウェーハに、前記エッチング停止層に結合された膜層を形成するエピタキシャル・シリコン上側表面を含めてなる撓み板波センサ。
【請求項26】
請求項25のセンサにおいて、前記エピタキシャル・シリコン上側表面上に圧電変換器を沈着させてなる撓み板波センサ。
【請求項27】
請求項26のセンサにおいて、前記圧電変換器内に開口をエッチングすることによりエピタキシャル・シリコンの接地用接点を設けてなる撓み板波センサ。
【請求項28】
請求項27のセンサにおいて、前記櫛パターンをチタン−白金−金(TiPtAu)金属製とし、前記櫛パターンに櫛歯形状の金属電極、ワイヤ結合パッド領域、及び接地用接点を含めてなる撓み板波センサ。
【請求項29】
請求項24のセンサにおいて、前記底基盤の厚さを約380μmとしてなる撓み板波センサ。
【請求項30】
請求項25のセンサにおいて、前記エピタキシャル・シリコン上側表面の厚さを約2μmとしてなる撓み板波センサ。
【請求項31】
請求項25のセンサにおいて、前記SiO2層の厚さを約1μmとしてなる撓み板波センサ。
【請求項32】
請求項28のセンサにおいて、前記櫛パターンの厚さを約0.1μmとしてなる撓み板波センサ。
【請求項33】
請求項1のセンサにおいて、前記駆動歯を長さ約300〜2000μmとし、前記駆動歯の相互間の間隔を約25〜50μmとしてなる撓み板波センサ。
【請求項34】
請求項1のセンサにおいて、前記感知歯を長さ約300〜2000μmとし、前記感知歯の相互間の間隔を約25〜50μmとしてなる撓み板波センサ。
【請求項35】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板の全長に亘り配置された駆動歯と感知歯とを有する撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項36】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板の全長に亘り配置された第1駆動歯の組と第2駆動歯の組とを有する撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項37】
請求項36のセンサにおいて、前記撓み板の全長に亘り配置された第1感知歯の組と第2感知歯の組とを含めてなる撓み板波センサ。
【請求項38】
請求項36のセンサにおいて、前記第1駆動歯組と第2駆動歯組とを相互に反対方向に向けてなる撓み板波センサ。
【請求項39】
請求項37のセンサにおいて、前記第1感知歯組と第2感知歯組とを相互に反対方向に向けてなる撓み板波センサ。
【請求項40】
請求項38のセンサにおいて、前記第1駆動歯組と第2駆動歯組とを交互配置してなる撓み板波センサ。
【請求項41】
請求項39のセンサにおいて、前記第1感知歯組と第2感知歯組とを交互配置してなる撓み板波センサ。
【請求項42】
請求項40のセンサにおいて、前記交互配置した第1駆動歯組及び第2駆動歯組を撓み板の幅の約50%に亘り延在させてなる撓み板波センサ。
【請求項43】
請求項41のセンサにおいて、前記交互配置した第1感知歯組及び第2感知歯組を撓み板の幅の約50%に亘り延在させてなる撓み板波センサ。
【請求項44】
請求項36のセンサにおいて、前記第1駆動歯組と第2駆動歯組とを同一方向に向けてなる撓み板波センサ。
【請求項45】
請求項37のセンサにおいて、前記第1感知歯組と第2感知歯組とを同一方向に向けてなる撓み板波センサ。
【請求項46】
請求項45のセンサにおいて、前記第1駆動歯組を第1感知歯組と交互配置してなる撓み板波センサ。
【請求項47】
請求項46のセンサにおいて、前記交互配置した第1駆動歯組及び第1感知歯組を撓み板の幅の約50%に亘り延在させてなる撓み板波センサ。
【請求項48】
請求項45のセンサにおいて、前記第2駆動歯組を第2感知歯組と交互配置してなる撓み板波センサ。
【請求項49】
請求項48のセンサにおいて、前記交互配置した第2駆動歯組及び第2感知歯組を撓み板の幅の約50%に亘り延在させてなる撓み板波センサ。
【請求項50】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板上に配置された第1駆動歯の組と第2駆動歯の組とを有し且つ第1駆動歯組を撓み板の全長の約75%に亘り延在させると共に第2駆動歯組を撓み板の全長の約25%に亘り延在させた撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項51】
請求項50のセンサにおいて、前記撓み板上に配置された第1感知歯の組と第2感知歯の組とを含め、第1感知歯組を撓み板の全長の約75%に亘り延在させると共に第2感知歯組を撓み板の全長の約25%に亘り延在させ、前記第1感知歯組及び第2感知歯組を前記第1駆動歯組及び第2駆動歯組と交互配置してなる撓み板波センサ。
【請求項52】
請求項50のセンサにおいて、前記第1駆動歯組及び第2駆動歯組を一方向に向け、前記第1感知歯組及び第2感知歯組を反対方向に向けてなる撓み板波センサ。
【請求項53】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板の全長の約50%に亘り配置された第1駆動歯の組と第2駆動歯の組とを有し且つ各駆動歯組をそれぞれ撓み板の一端部において撓み板のほぼ全幅に亘り延在させると共に撓み板の中心部において撓み板の中心に向けて湾曲させた撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項54】
請求項53のセンサにおいて、前記撓み板の全長の約50%に亘り配置された第1感知歯の組と第2感知歯の組とを含め、前記各感知歯組をそれぞれ撓み板の一端部において撓み板のほぼ全幅に亘り延在させると共に撓み板の中心部において撓み板の中心に向けて湾曲させてなる撓み板波センサ。
【請求項55】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板上に配置された駆動歯と感知歯とを有し且つ駆動歯を撓み板の全長の約50%に亘り延在させると共に感知歯を撓み板の全長の約50%に亘り延在させた撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項56】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板上に配置された駆動歯の組と感知歯の組とを有し且つ駆動歯組を撓み板の全長の約50%に亘り延在させると共に感知歯組を撓み板の全長の約50%に亘り延在させた撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項57】
基板上にエッチング停止層を堆積し、前記エッチング停止層上に膜層を堆積し、前記膜層上に圧電層を堆積し、前記圧電層上に圧電層の全長に亘り延在する駆動歯付きの櫛パターンを形成し、前記基板を貫通し且つ実質上平行な内壁を有する空洞をエッチングし、前記エッチング停止層の空洞と膜層との間の部分を除去して膜層の一部分を露出させてなる撓み板波センサの製造方法。
【請求項58】
請求項57の製造方法おいて、前記圧電層に孔をエッチングしてシリコン膜層上に接地用接点を形成してなる撓み板波センサの製造方法。
【請求項59】
基板上にエッチング停止層を堆積し、前記エッチング停止層上に膜層を堆積し、前記膜層上に圧電層を堆積し、前記圧電層上に前記膜層の全長に亘り延在する駆動歯及び感知歯付きの櫛パターンを第1変換器として形成し、前記圧電層上に第1変換器から間隔を隔てて第2変換器を形成し、前記基板を貫通し且つ実質上平行な内壁を有する空洞をエッチングし、前記エッチング停止層の空洞と膜層との間の部分を除去して膜層の一部分を露出させ、前記露出された膜層の一部分上に吸収性コーティングを堆積してなる撓み板波センサの製造方法。
【請求項60】
請求項59の製造方法おいて、前記圧電層に孔をエッチングしてシリコン膜層上に接地用接点を形成してなる撓み板波センサの製造方法。
【請求項1】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板の全長に亘り配置された駆動歯を有する撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項2】
請求項1のセンサにおいて、前記撓み板の全長に亘り駆動歯と交互配置された感知歯を含めてなる撓み板波センサ。
【請求項3】
請求項2のセンサにおいて、前記感知歯を一方向に向け、前記駆動歯を反対方向に向けてなる撓み板波センサ。
【請求項4】
請求項1のセンサにおいて、前記櫛パターンを、前記撓み板中に単一の固有モードが励起されるように撓み板の全ての固有モードに対して位置揃えしてなる撓み板波センサ。
【請求項5】
請求項1のセンサにおいて、前記櫛パターンにより、前記センサに単一の顕著なピークを出力させてセンサ性能を改善してなる撓み板波センサ。
【請求項6】
請求項1のセンサにおいて、前記櫛パターンにより、前記センサの伝達関数を単一のピーク又は他のピークより遥かに大きなピークとなるように変換してなる撓み板波センサ。
【請求項7】
請求項1のセンサにおいて、前記駆動歯を、前記撓み板中に励起される固有モードと位置揃えしてなる撓み板波センサ。
【請求項8】
請求項2のセンサにおいて、前記感知歯を、前記撓み板中に励起される固有モードと位置揃えしてなる撓み板波センサ。
【請求項9】
請求項1のセンサにおいて、前記櫛パターンにより、前記撓み板の圧電特性と協働して運動を起こさせる電界を発生してなる撓み板波センサ。
【請求項10】
請求項1のセンサにおいて、前記櫛パターンを銅製としてなる撓み板波センサ。
【請求項11】
請求項1のセンサにおいて、前記櫛パターンを、銅、チタニウム−白金−金(TiPtAu)金属、チタニウム−白金(TiPt)及びアルミニウムからなる群から選んだ材料製としてなる撓み板波センサ。
【請求項12】
請求項1のセンサにおいて、前記櫛パターンをアルミニウム製としてなる撓み板波センサ。
【請求項13】
請求項1のセンサにおいて、前記櫛パターンの厚さを0.1μmしてなる撓み板波センサ。
【請求項14】
請求項1のセンサにおいて、前記櫛パターンにワイヤ結合パッド域及び接地用接点を含めてなる撓み板波センサ。
【請求項15】
請求項1のセンサにおいて、前記駆動歯を撓み板上に接触させてなる撓み板波センサ。
【請求項16】
請求項2のセンサにおいて、前記感知歯を撓み板上に接触させてなる撓み板波センサ。
【請求項17】
請求項1のセンサにおいて、前記駆動歯を撓み板の全幅に亘り延在させてなる撓み板波センサ。
【請求項18】
請求項2のセンサにおいて、前記感知歯を撓み板の全幅に亘り延在させてなる撓み板波センサ。
【請求項19】
請求項1のセンサにおいて、底基盤と、底基盤上に設けたエッチング停止層と、エッチング停止層上に設けた膜層と、底基盤及びエッチング停止層内に膜層の一部分が露出するように設けられ且つ実質上平行な内壁を有する空洞と、膜層上に設けた圧電層とを含め、前記櫛パターンを圧電層上に配置してなる撓み板波センサ。
【請求項20】
請求項19のセンサにおいて、前記圧電層を亜硝酸アルミニウム、酸化亜鉛、及びジルコニウム・チタン酸鉛からなる群から選んだ材料製としてなる撓み板波センサ。
【請求項21】
請求項19のセンサにおいて、前記エッチング停止層を二酸化シリコン(SiO2)製としてなる撓み板波センサ。
【請求項22】
請求項19のセンサにおいて、前記膜層をシリコン製としてなる撓み板波センサ。
【請求項23】
請求項19のセンサにおいて、前記底基盤をシリコン製としてなる撓み板波センサ。
【請求項24】
請求項23のセンサにおいて、前記底基盤にシリコン・オン・インシュレータ(SOI)ウェーハを含めてなる撓み板波センサ。
【請求項25】
請求項24のセンサにおいて、前記シリコン・オン・インシュレータウェーハに、前記エッチング停止層に結合された膜層を形成するエピタキシャル・シリコン上側表面を含めてなる撓み板波センサ。
【請求項26】
請求項25のセンサにおいて、前記エピタキシャル・シリコン上側表面上に圧電変換器を沈着させてなる撓み板波センサ。
【請求項27】
請求項26のセンサにおいて、前記圧電変換器内に開口をエッチングすることによりエピタキシャル・シリコンの接地用接点を設けてなる撓み板波センサ。
【請求項28】
請求項27のセンサにおいて、前記櫛パターンをチタン−白金−金(TiPtAu)金属製とし、前記櫛パターンに櫛歯形状の金属電極、ワイヤ結合パッド領域、及び接地用接点を含めてなる撓み板波センサ。
【請求項29】
請求項24のセンサにおいて、前記底基盤の厚さを約380μmとしてなる撓み板波センサ。
【請求項30】
請求項25のセンサにおいて、前記エピタキシャル・シリコン上側表面の厚さを約2μmとしてなる撓み板波センサ。
【請求項31】
請求項25のセンサにおいて、前記SiO2層の厚さを約1μmとしてなる撓み板波センサ。
【請求項32】
請求項28のセンサにおいて、前記櫛パターンの厚さを約0.1μmとしてなる撓み板波センサ。
【請求項33】
請求項1のセンサにおいて、前記駆動歯を長さ約300〜2000μmとし、前記駆動歯の相互間の間隔を約25〜50μmとしてなる撓み板波センサ。
【請求項34】
請求項1のセンサにおいて、前記感知歯を長さ約300〜2000μmとし、前記感知歯の相互間の間隔を約25〜50μmとしてなる撓み板波センサ。
【請求項35】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板の全長に亘り配置された駆動歯と感知歯とを有する撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項36】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板の全長に亘り配置された第1駆動歯の組と第2駆動歯の組とを有する撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項37】
請求項36のセンサにおいて、前記撓み板の全長に亘り配置された第1感知歯の組と第2感知歯の組とを含めてなる撓み板波センサ。
【請求項38】
請求項36のセンサにおいて、前記第1駆動歯組と第2駆動歯組とを相互に反対方向に向けてなる撓み板波センサ。
【請求項39】
請求項37のセンサにおいて、前記第1感知歯組と第2感知歯組とを相互に反対方向に向けてなる撓み板波センサ。
【請求項40】
請求項38のセンサにおいて、前記第1駆動歯組と第2駆動歯組とを交互配置してなる撓み板波センサ。
【請求項41】
請求項39のセンサにおいて、前記第1感知歯組と第2感知歯組とを交互配置してなる撓み板波センサ。
【請求項42】
請求項40のセンサにおいて、前記交互配置した第1駆動歯組及び第2駆動歯組を撓み板の幅の約50%に亘り延在させてなる撓み板波センサ。
【請求項43】
請求項41のセンサにおいて、前記交互配置した第1感知歯組及び第2感知歯組を撓み板の幅の約50%に亘り延在させてなる撓み板波センサ。
【請求項44】
請求項36のセンサにおいて、前記第1駆動歯組と第2駆動歯組とを同一方向に向けてなる撓み板波センサ。
【請求項45】
請求項37のセンサにおいて、前記第1感知歯組と第2感知歯組とを同一方向に向けてなる撓み板波センサ。
【請求項46】
請求項45のセンサにおいて、前記第1駆動歯組を第1感知歯組と交互配置してなる撓み板波センサ。
【請求項47】
請求項46のセンサにおいて、前記交互配置した第1駆動歯組及び第1感知歯組を撓み板の幅の約50%に亘り延在させてなる撓み板波センサ。
【請求項48】
請求項45のセンサにおいて、前記第2駆動歯組を第2感知歯組と交互配置してなる撓み板波センサ。
【請求項49】
請求項48のセンサにおいて、前記交互配置した第2駆動歯組及び第2感知歯組を撓み板の幅の約50%に亘り延在させてなる撓み板波センサ。
【請求項50】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板上に配置された第1駆動歯の組と第2駆動歯の組とを有し且つ第1駆動歯組を撓み板の全長の約75%に亘り延在させると共に第2駆動歯組を撓み板の全長の約25%に亘り延在させた撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項51】
請求項50のセンサにおいて、前記撓み板上に配置された第1感知歯の組と第2感知歯の組とを含め、第1感知歯組を撓み板の全長の約75%に亘り延在させると共に第2感知歯組を撓み板の全長の約25%に亘り延在させ、前記第1感知歯組及び第2感知歯組を前記第1駆動歯組及び第2駆動歯組と交互配置してなる撓み板波センサ。
【請求項52】
請求項50のセンサにおいて、前記第1駆動歯組及び第2駆動歯組を一方向に向け、前記第1感知歯組及び第2感知歯組を反対方向に向けてなる撓み板波センサ。
【請求項53】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板の全長の約50%に亘り配置された第1駆動歯の組と第2駆動歯の組とを有し且つ各駆動歯組をそれぞれ撓み板の一端部において撓み板のほぼ全幅に亘り延在させると共に撓み板の中心部において撓み板の中心に向けて湾曲させた撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項54】
請求項53のセンサにおいて、前記撓み板の全長の約50%に亘り配置された第1感知歯の組と第2感知歯の組とを含め、前記各感知歯組をそれぞれ撓み板の一端部において撓み板のほぼ全幅に亘り延在させると共に撓み板の中心部において撓み板の中心に向けて湾曲させてなる撓み板波センサ。
【請求項55】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板上に配置された駆動歯と感知歯とを有し且つ駆動歯を撓み板の全長の約50%に亘り延在させると共に感知歯を撓み板の全長の約50%に亘り延在させた撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項56】
長さと幅とを有する撓み板、及び前記撓み板中に励起される固有モードの数が少なくなるように撓み板上に配置された駆動歯の組と感知歯の組とを有し且つ駆動歯組を撓み板の全長の約50%に亘り延在させると共に感知歯組を撓み板の全長の約50%に亘り延在させた撓み板上の櫛パターンを備え、前記櫛パターンによりセンサの操作及び設計を簡単化してなる撓み板波センサ。
【請求項57】
基板上にエッチング停止層を堆積し、前記エッチング停止層上に膜層を堆積し、前記膜層上に圧電層を堆積し、前記圧電層上に圧電層の全長に亘り延在する駆動歯付きの櫛パターンを形成し、前記基板を貫通し且つ実質上平行な内壁を有する空洞をエッチングし、前記エッチング停止層の空洞と膜層との間の部分を除去して膜層の一部分を露出させてなる撓み板波センサの製造方法。
【請求項58】
請求項57の製造方法おいて、前記圧電層に孔をエッチングしてシリコン膜層上に接地用接点を形成してなる撓み板波センサの製造方法。
【請求項59】
基板上にエッチング停止層を堆積し、前記エッチング停止層上に膜層を堆積し、前記膜層上に圧電層を堆積し、前記圧電層上に前記膜層の全長に亘り延在する駆動歯及び感知歯付きの櫛パターンを第1変換器として形成し、前記圧電層上に第1変換器から間隔を隔てて第2変換器を形成し、前記基板を貫通し且つ実質上平行な内壁を有する空洞をエッチングし、前記エッチング停止層の空洞と膜層との間の部分を除去して膜層の一部分を露出させ、前記露出された膜層の一部分上に吸収性コーティングを堆積してなる撓み板波センサの製造方法。
【請求項60】
請求項59の製造方法おいて、前記圧電層に孔をエッチングしてシリコン膜層上に接地用接点を形成してなる撓み板波センサの製造方法。
【図1】

【図2】
【図3A】

【図3B】
【図4】
【図5】

【図6A】
【図6B】

【図7A】

【図7B】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【図12】
【図13】
【図14】

【図15A】
【図15B】
【図15C】
【図16A】

【図16B】
【図16C】

【図16D】

【図16E】
【図16F】

【図17】
【図18】
【図2】
【図3A】
【図3B】
【図4】
【図5】
【図6A】
【図6B】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【図12】
【図13】
【図14】
【図15A】
【図15B】
【図15C】
【図16A】
【図16B】
【図16C】
【図16D】
【図16E】
【図16F】
【図17】
【図18】
【公表番号】特表2007−510138(P2007−510138A)
【公表日】平成19年4月19日(2007.4.19)
【国際特許分類】
【出願番号】特願2006−534071(P2006−534071)
【出願日】平成16年9月30日(2004.9.30)
【国際出願番号】PCT/US2004/032061
【国際公開番号】WO2005/033660
【国際公開日】平成17年4月14日(2005.4.14)
【出願人】(591044474)ザ・チャールズ・スターク・ドレイパー・ラボラトリー・インコーポレイテッド (8)
【Fターム(参考)】
【公表日】平成19年4月19日(2007.4.19)
【国際特許分類】
【出願日】平成16年9月30日(2004.9.30)
【国際出願番号】PCT/US2004/032061
【国際公開番号】WO2005/033660
【国際公開日】平成17年4月14日(2005.4.14)
【出願人】(591044474)ザ・チャールズ・スターク・ドレイパー・ラボラトリー・インコーポレイテッド (8)
【Fターム(参考)】
[ Back to top ]