
測定装置
【課題】電極部から身体に作用する接触圧を簡易な構成で評価する。
【解決手段】電極部14は、被験者の測定部位に接触する電極対PA(電極E1,電極E2)および電極対PB(電極E3,電極E4)を含む。制御部22は、電極対PAを利用した2電極法でインピーダンスZA[n]を算定するとともに、電極対PAと電極対PBとを利用した4電極法でインピーダンスZB[n]を算定し、測定部位に対する電極部14の接触圧に応じた接触圧指標C[n]をインピーダンスZA[n]とインピーダンスZB[n]との差分に基づいて算定する。
【解決手段】電極部14は、被験者の測定部位に接触する電極対PA(電極E1,電極E2)および電極対PB(電極E3,電極E4)を含む。制御部22は、電極対PAを利用した2電極法でインピーダンスZA[n]を算定するとともに、電極対PAと電極対PBとを利用した4電極法でインピーダンスZB[n]を算定し、測定部位に対する電極部14の接触圧に応じた接触圧指標C[n]をインピーダンスZA[n]とインピーダンスZB[n]との差分に基づいて算定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、皮下脂肪厚等の生体情報を計測する技術に関する。
【背景技術】
【0002】
生体インピーダンスを利用して被験者の生体情報を算定する技術が従来から提案されている。例えば特許文献1には、電極部(プローブ)に形成された4個の電極を被験者の身体に接触させて生体インピーダンスを算定し、生体インピーダンスから特定されるレジスタンスRとリアクタンスXとの比(R/X)から被験者の皮下脂肪厚を算定する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−259776号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、電極部から作用する接触圧(押圧力)に応じて皮下脂肪は変形するため、生体インピーダンスに応じて算定される皮下脂肪厚には誤差が発生する可能性がある。電極部の接触圧を検出する圧力センサ等の検出器を利用すれば、電極部から身体に作用する接触圧の適否(例えば皮下脂肪の変形の有無)を検出することも可能であるが、検出器の追加により測定装置の構成が複雑化するという問題がある。なお、以上の説明では皮下脂肪厚の測定を想定したが、電極部の接触圧に依存する他の生体情報(例えば筋肉厚)の測定時にも同様の問題が発生し得る。以上の事情を考慮して、本発明は、電極部から身体に作用する接触圧を簡易な構成で評価することを目的とする。
【課題を解決するための手段】
【0005】
以上の課題を解決するために本発明が採用する手段を説明する。なお、本発明の理解を容易にするために、以下の説明では、本発明の要素と後述の実施形態の要素との対応を括弧書で付記するが、本発明の範囲を実施形態の例示に限定する趣旨ではない。
【0006】
本発明の測定装置は、被験者の身体(例えば測定部位60)に接触する第1電極対(例えば電極対PA)および第2電極対(例えば電極対PB)を含む電極部(例えば電極部14)と、第1電極対を利用した2電極法で第1インピーダンス(例えばインピーダンスZA[n])を算定する第1算定手段(例えば制御部22)と、第1電極対と第2電極対とを利用した4電極法で第2インピーダンス(例えばインピーダンスZB[n])を算定する第2算定手段(例えば制御部22)と、被験者の身体に対する電極部の接触圧に応じた接触圧指標(例えば接触圧指標C[n])を第1インピーダンスと第2インピーダンスとの差分に基づいて算定する指標算定手段(例えば制御部22)とを具備する。以上の構成では、第1電極対を利用した2電極法で測定された第1インピーダンスと第1電極対および第2電極対を利用した4電極法で測定された第2インピーダンスとの差分に応じた接触圧指標C[n]が電極部の接触圧の指標として算定される。したがって、電極部の接触圧の検出に専用される圧力センサ等の検出器を必要とせずに身体に対する電極部の接触圧を評価することが可能である。
【0007】
本発明の好適な態様に係る測定装置は、第1電極対の電極間に被験者の身体を介して電流(例えば測定電流I)を流す電流生成手段(例えば電流生成部32)と、第1電極対および第2電極対の一方を選択する電極選択手段(例えば電極選択部36)と、電極選択手段が選択した電極対の電極間の電圧(例えば測定電圧V)を検出する電圧検出手段(例えば電圧検出部34)とを具備し、第1算定手段は、電極選択手段が第1電極対を選択した状態で電流生成手段が生成する電流と電圧検出手段が検出する電圧とに応じて第1インピーダンスを算定し、第2算定手段は、電極選択手段が第2電極対を選択した状態で電流生成手段が生成する電流と電圧検出手段が検出する電圧とに応じて第2インピーダンスを算定する。以上の態様では、電極選択手段の選択の対象に応じて2電極法と4電極法とを簡便に切替えることが可能である。
【0008】
本発明の好適な態様に係る測定装置は、被験者の身体と電極部との接触状態の適否を接触圧指標に応じて判定する接触状態判定手段(例えば制御部22)と、被験者の身体と電極部との接触状態が適正であると接触状態判定手段が判定した場合に第2インピーダンスに応じた生体情報を算定する情報生成手段(例えば制御部22)とを具備する。以上の態様では、被験者の身体と電極部との接触状態(例えば接触圧)が適正である場合に生体情報が生成されるから、被験者の身体と電極部との接触状態に依存する生体情報(例えば皮下脂肪厚)を高精度に測定できるという利点がある。
【0009】
本発明の好適な態様では、第1算定手段による第1インピーダンスの算定と第2算定手段による第2インピーダンスの算定と指標算定手段による接触圧指標の算定とを含む測定処理が複数回にわたり実行され、接触状態判定手段は、各測定処理にて測定された接触圧指標を基準値(例えば基準値CREF)と比較することで被験者の身体と電極部との接触状態の適否を測定処理毎に判定する。以上の態様では、各測定処理で算定された接触圧指標を基準値と比較することで被験者の身体と電極部との接触状態(接触圧)の変化を検出することが可能である。接触圧指標の基準値は任意であるが、例えば、一の測定処理(例えば第1回目の測定処理)にて測定された接触圧指標を、以後の各測定処理の接触圧指標と比較される基準値とする構成が好適である。
【0010】
本発明の好適な態様において、情報生成手段は、接触状態が適正であるとの判定が所定回(例えば閾値MTH)の測定処理にわたって連続した場合に生体情報を生成する。以上の態様では、接触状態が適正であるとの判断が所定回の測定処理にわたって連続した場合(すなわち接触状態が安定した場合)に生体情報が生成されるから、接触状態が不安定に変化する状態で生体情報を生成する構成と比較して、接触状態に依存する生体情報を高精度に測定できるという利点がある。
【0011】
本発明の好適な態様において、第1電極対は、第1電極(例えば電極E1)と第2電極(例えば電極E2)とで構成され、第2電極対は、第1電極および第2電極の間に配置された第3電極(例えば電極E3)と第4電極(例えば電極E4)とで構成され、第1電極と第2電極と第3電極と第4電極とは、第1方向(例えばX方向)に長尺な形状に形成され、第1方向に直交する第2方向(例えばY方向)に相互に間隔をあけて配列する。以上の態様によれば、各電極を確実に被験者の身体に接触させることが可能である。
【0012】
以上の各態様に係る測定装置は、例えば演算処理装置とプログラム(ソフトウェア)との協働で実現される。本発明のプログラムは、被験者の身体に接触する第1電極対および第2電極対を含む電極部が接続されたコンピュータに、第1電極対を利用した2電極法で第1インピーダンスを算定する第1算定処理(例えば処理S3)と、第1電極対と第2電極対とを利用した4電極法で第2インピーダンスを算定する第2算定処理(例えば処理S6)と、被験者の身体に対する電極部の接触圧に応じた接触圧指標を第1インピーダンスと第2インピーダンスとの差分に基づいて算定する指標算定処理(例えば処理S8)とを実行させる。以上のプログラムによれば、本発明の測定装置と同様の作用および効果が実現される。本発明のプログラムは、コンピュータが読取可能な記録媒体に格納された形態で利用者に提供されてコンピュータにインストールされるほか、通信網を介した配信の形態でサーバ装置から提供されてコンピュータにインストールされる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1実施形態に係る測定装置の外観図である。
【図2】測定装置の電気的な構成のブロック図である。
【図3】測定処理のフローチャートである。
【図4】測定電流の電流経路および測定電圧の検出位置の説明図である。
【図5】接触圧と測定部位のインピーダンスとの関係を示す図表である。
【図6】第2実施形態における測定処理のフローチャートである。
【発明を実施するための形態】
【0014】
<A:第1実施形態>
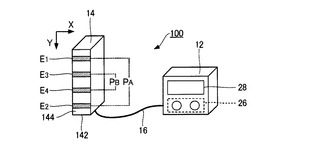
図1は、第1実施形態に係る測定装置100の構成図である。測定装置100は、被験者の身体に関する生体情報(例えば体組成に関する指標)を測定する生体計測器である。第1実施形態では、被験者の身体のうち測定対象となる任意の部位(以下「測定部位」という)の皮下脂肪厚Lfを生体情報として例示する。図1に示すように、測定装置100は、本体部12と電極部(プローブ)14とを具備する。本体部12と電極部14とはケーブル16を介して電気的に接続される。なお、本体部12と電極部14とを一体に構成することも可能である。
【0015】
電極部14は、利用者(被験者自身や測定者)が把持可能な筐体142と、筐体142の表面144に形成された電極対PAおよび電極対PBとを含んで構成される。電極対PAは電極E1および電極E2の対であり、電極対PBは電極E3および電極E4の対である。4個の電極E1〜E4の各々は、X方向に長尺な形状(略長方形状)に形成され、X方向に直交するY方向に相互に間隔をあけて配列する。図1に示すように、電極E3および電極E4は、電極E1と電極E2との間に位置する。図1では電極E1〜E4を等間隔に配置した場合を例示した。利用者は、被験者の身体の測定部位に4個の電極E1〜E4が接触するように電極部14を移動させることが可能である。
【0016】
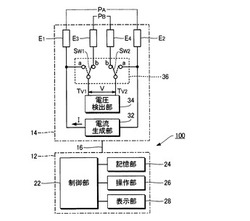
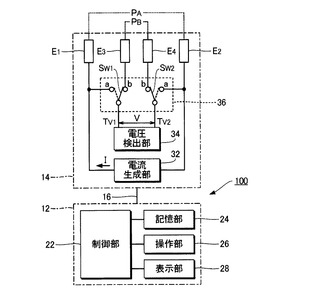
図2は、測定装置100の電気的な構成のブロック図である。図2に示すように、本体部12は、制御部22と記憶部24と操作部26と表示部28とを具備する。制御部22(CPU)は、記憶部24に記憶されたプログラムの実行で測定装置100の各要素を制御する。記憶部24は、制御部22が実行するプログラムや制御部22が使用する各種のデータを記憶する記憶回路(例えばROMやRAM)である。
【0017】
操作部26は、利用者からの指示を受付ける入力機器であり、図1に示すように複数の操作子を含んで構成される。例えば皮下脂肪厚Lfの測定開始が操作部26に対する操作で指示される。表示部28(例えば液晶表示装置)は、制御部22による制御のもとで各種の画像を表示する。例えば、表示部28は、測定装置100を利用した測定手順の案内や測定装置100の測定結果(皮下脂肪厚Lf)を表示する。
【0018】
図2に示すように、電極部14は、前述の電極対PAおよび電極対PBのほか、筐体142に収容された電流生成部32と電圧検出部34と電極選択部36とを具備する。なお、電流生成部32と電圧検出部34と電極選択部36とを本体部12に設置することも可能である。
【0019】
図2の電流生成部32は、電極E1と電極E2との間に測定電流Iを供給する。測定電流Iは、被験者の身体を経由して電極E1と電極E2との間を流れる所定の周波数(例えば500kHzまたは6.25kHz)の交流電流である。電圧検出部34は、一対の電極E間の電圧(以下「測定電圧」という)Vを検出する。電圧検出部34が検出した測定電圧Vは、A/D変換器(図示略)にてデジタル信号に変換されたうえで制御部22に供給される。
【0020】
電極選択部36は、電極対PAおよび電極対PBの何れかを電圧検出部34の接続先として選択する。図2に示すように、第1実施形態の電極選択部36は、スイッチSW1とスイッチSW2とを含んで構成される。スイッチSW1は、電圧検出部34の端子TV1を電極E1(接点a)および電極E3(接点b)の一方に接続し、スイッチSW2は、電圧検出部34の端子TV2を電極E2(接点a)および電極E4(接点b)の一方に接続する。
【0021】
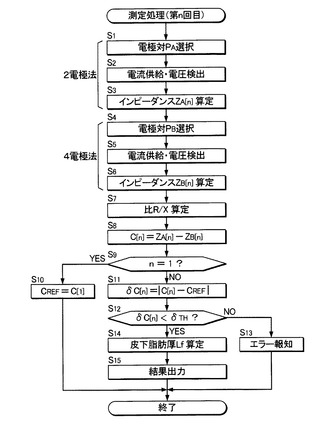
図3は、制御部22が実行する測定処理のフローチャートである。電極部14の4個の電極E1〜E4が被験者の測定部位60に接触した状態で測定開始の指示が操作部26に付与されると、例えば割込信号で規定される所定の間隔で図3の測定処理が反復される。変数nは測定処理の回数(nは自然数)を意味する。また、図4は、測定処理の実行中における測定電流Iの電流経路および測定電圧Vの検出位置の模式図である。
【0022】
第n回目の測定処理を開始すると、制御部22は、電圧検出部34の接続先として電極対PAが選択されるように電極選択部36を制御する(S1)。具体的には、制御部22は、スイッチSW1およびスイッチSW2の各々を接点a側に制御することで、図4の部分(A)に示すように、電圧検出部34の端子TV1を電極E1に接続するとともに端子TV2を電極E2に接続する。電極E3および電極E4は電圧検出部34から電気的に絶縁された状態となる。制御部22は、以上の状態で電流生成部32と電圧検出部34とを動作させる(S2)。したがって、電流生成部32が生成した測定電流Iが電極E1から測定部位60を経由して電極E2に流れた状態で、電圧検出部34は電極E1と電極E2との間の測定電圧Vを検出する。
【0023】
制御部22は、処理S2での測定電流Iと測定電圧Vとに応じてインピーダンスZA[n]を算定する(S3)。インピーダンスZA[n]の算定には公知の技術が任意に採用される。以上の説明から理解されるように、制御部22が処理S1から処理S3を実行することで、電極対PAを利用した2電極法(電極対PBは不使用)でインピーダンスZA[n]を算定する手段(第1算定手段)が実現される。
【0024】
図4の部分(A)に示すように、測定電流Iの経路上には、測定部位60(皮下脂肪)の生体インピーダンスRBに加えて、電極E1と測定部位60との間の接触インピーダンスRC1と、電極E2と測定部位60との間の接触インピーダンスRC2とが付随する。したがって、処理S3で算定されるインピーダンスZA[n]は、近似的に以下の数式(1)で表現される。
ZA[n]=RB+RC1+RC2 ……(1)
【0025】
以上の手順でインピーダンスZA[n]を算定すると、制御部22は、電圧検出部34の接続先として電極対PBが選択されるように電極選択部36を制御する(S4)。具体的には、制御部22は、スイッチSW1およびスイッチSW2の各々を接点b側に制御することで、図4の部分(B)に示すように、電圧検出部34の端子TV1を電極E3に接続するとともに端子TV2を電極E4に接続する。制御部22は、以上の状態で電流生成部32と電圧検出部34とを動作させる(S5)。したがって、測定電流Iが電極E1から測定部位60を経由して電極E2に流れた状態で、電圧検出部34は電極E3と電極E4との間の測定電圧Vを検出する。
【0026】
制御部22は、処理S5での測定電流Iと測定電圧Vとに応じてインピーダンスZB[n]を算定する(S6)。インピーダンスZB[n]の算定には公知の技術が任意に採用される。以上の説明から理解されるように、制御部22が処理S4から処理S6を実行することで、電極対PAおよび電極対PBを利用した4電極法でインピーダンスZB[n]を算定する手段(第2算定手段)が実現される。また、制御部22は、測定電流Iと測定電圧Vとの位相差θおよびインピーダンスZB[n]からレジスタンスR(インピーダンスZB[n]の実数部)とリアクタンスX(インピーダンスZB[n]の虚数部)とを算定したうえで両者間の比R/Xを算定する(S7)。
【0027】
処理S5では、電極対PAの内側に位置する電極対PBを利用して測定電圧Vが測定されるから、電極E1の接触インピーダンスRC1や電極E2の接触インピーダンスRC2は測定電圧Vに影響しない。また、電圧検出部34の端子TV1や端子TV2には電流が殆ど流れないから、電極E3の接触インピーダンスRC3や電極E4の接触インピーダンスRC4も測定電圧Vには影響しない。以上のように4電極法では各電極Eの接触インピーダンスRC(RC1〜RC4)を無視できるから、処理S6で算定されるインピーダンスZB[n]は、以下の数式(2)で表現されるように測定部位60の生体インピーダンスRBに略一致する。
ZB[n]=RB ……(2)
【0028】
制御部22は、処理S3で算定したインピーダンスZA[n]と処理S6で算定したインピーダンスZB[n]との相違に応じた接触圧指標C[n]を算定する(S8)。具体的には、制御部22は、以下の数式(3)で示すように、インピーダンスZA[n]とインピーダンスZB[n]との差分を接触圧指標C[n]として算定する。
C[n]=ZA[n]−ZB[n] ……(3)
【0029】
数式(1)および数式(2)を数式(3)に代入すると以下の数式(4)が導出される。
C[n]=RC1+RC2 ……(4)
数式(4)の通り、接触圧指標C[n]は、電極E1の接触インピーダンスRC1と電極E2の接触インピーダンスRC2との加算値に相当する。接触インピーダンスRC(RC1,RC2)は、電極部14から測定部位60に作用する接触圧(押圧力)に応じて変化する。したがって、測定部位60に対する電極部14の接触圧の指標として数式(3)の接触圧指標C[n]を利用することが可能である。
【0030】
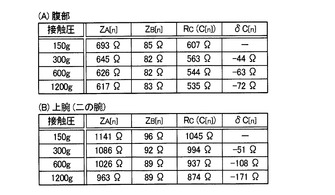
図5は、電極部14から測定部位60に作用する接触圧と各インピーダンスとの関係を示す図表である。2電極法で測定されたインピーダンスZA[n]と4電極法で測定されたインピーダンスZB[n]と接触圧指標C[n]との各数値が、接触圧を変化させた複数の場合の各々について図示されている。図5の部分(A)は被験者の腹部を測定部位60とした場合の測定結果であり、図5の部分(B)は被験者の上腕(二の腕)を測定部位60とした場合の測定結果である。
【0031】
図5に示すように、測定部位60に対する電極部14の接触圧が増加するほど2電極法のインピーダンスZA[n]は減少するのに対し、4電極法のインピーダンスZB[n]は殆ど変化しない。したがって、測定部位60に対する接触圧に応じて接触圧指標C[n]は変化する。具体的には、接触圧が増加するほど接触圧指標C[n]が減少するという相関が図5から把握される。以上の傾向を考慮して、第1実施形態では、処理S8で算定される接触圧指標C[n]を測定部位60と電極部14との接触状態(接触圧)の適否の評価に利用する。
【0032】
図3の処理S8で接触圧指標C[n]を算定すると、制御部22は、現段階で実行している測定処理が第1回目(n=1)であるか否かを判定する(S9)。処理S9の結果が肯定である場合、制御部22は、今回の測定処理の処理S8で算定した接触圧指標C[n](C[1])を基準値CREFとして記憶部24に格納したうえで第1回目の測定処理を終了する(S10)。基準値CREFは、第2回目以降の各測定処理で算定される接触圧指標C[n]の基準となる数値である。
【0033】
処理S9の結果が否定である場合(すなわち、第2回目以降の測定処理の実行中である場合)、制御部22は、現段階(第n回目)の測定処理内の処理S8で算定した接触圧指標C[n]を記憶部24内の基準値CREFと比較したときの変動量δC[n]を算定する(S11)。具体的には、変動量δC[n]は、接触圧指標C[n]と基準値CREFとの差分の絶対値(δC[n]=|C[n]−CREF|)である。そして、制御部22は、変動量δC[n]が所定の閾値δTHを下回るか否かを判定する(S12)。閾値δTHは、例えば50Ω程度の数値に設定される。
【0034】
測定部位60に対する接触圧が測定開始の直後(第1回目の測定処理)から大幅に増加した場合、測定部位60の皮下脂肪が電極部14による押圧で大きく変形している可能性が高い。以上のように測定部位60が変形した状態では皮下脂肪厚Lfを正確に推定できない。そこで、変動量δC[n]が閾値δTHを上回ると処理S12で判定した場合(すなわち、第1回目の測定処理の実行時と比較して接触圧が大幅に変化した場合)、制御部22は、測定部位60に対する接触圧が不適正である旨の警告(測定エラー)を利用者に報知したうえで第n回目の測定処理を終了する(S13)。利用者に対する警告の方法は任意であるが、例えば表示部28に対する画像の表示や音声での出力が好適である。以上の説明から理解されるように、制御部22が処理S12を実行することで、測定部位60と電極部14(各電極E)との接続状態の適否を接触圧指標C[n]に応じて判定する手段(接触状態判定手段)が実現される。
【0035】
他方、測定部位60に対する接触圧が適正な範囲内に維持されている場合(すなわち第1回目の測定処理の実行時から測定部位60が過度に変形していない場合)、接触圧指標C[n]は基準値CREFを含む所定の範囲(例えば(CREF±δTH)の範囲)内の数値となる。そこで、変動量δC[n]が閾値δTHを下回ると処理S12で判定した場合、制御部22は、今回(第n回目)の測定処理の処理S6で算定したインピーダンスZB[n](生体インピーダンスRB)に応じた皮下脂肪厚Lfを算定する(S14)。すなわち、制御部22が処理S14を実行することで、測定部位60と電極部14との接触状態が適正であると判定された場合(S12:YES)に生体情報を算定する要素(情報生成手段)が実現される。
【0036】
皮下脂肪は筋肉と比較して測定電流Iと測定電圧Vとの位相差θを発生させ難いから、測定部位60の皮下脂肪厚Lfが大きいほど位相差θは小さくなる。したがって、皮下脂肪厚Lfが大きいほど、処理S7で算定される比R/Xが大きくなるという傾向がある。以上の傾向を考慮すると、皮下脂肪厚Lf(測定部位60の表面を基準(ゼロ)とした皮下脂肪の深さ)は、定数aおよび定数bを含む以下の数式(5)で表現される。定数aおよび定数bは、比R/Xと皮下脂肪厚Lfの実測値との相関に応じて統計的に選定される。なお、皮下脂肪厚Lfと比R/Xとの関係については特許文献1にも詳述されている。
Lf=−a−b×(R/X) ……(5)
【0037】
図3の処理S14において、制御部22は、4電極法のインピーダンスZB[n](測定部位60の生体インピーダンスRB)に応じて処理S7で算定した比R/Xについて数式(5)の演算を実行することで皮下脂肪厚Lfを生体情報として算定する。そして、制御部22は、処理S14で算定した皮下脂肪厚Lfを測定結果として表示部28に表示させる(S15)。以上の説明から理解されるように、表示部28に表示される皮下脂肪厚Lfの数値が測定処理毎に刻々と変化し、測定部位60に対する電極部14の接触圧が測定開始時と比較して大幅に変化した場合(すなわち、第1回目の測定処理の実行時と比較して測定部位60が大きく変形した場合)には利用者に警告が報知される。
【0038】
以上に例示した第1実施形態では、電極対PAを利用した2電極法で測定されたインピーダンスZA[n]と電極対PAおよび電極対PBを利用した4電極法で測定されたインピーダンスZB[n]との相違に応じた接触圧指標C[n]が、測定部位60に対する電極部14の接触圧の指標として算定される。すなわち、皮下脂肪厚Lfの測定に使用される各電極Eが接触圧指標C[n]の算定に流用される。したがって、電極部14の接触圧の検出に専用される圧力センサ等の検出器を必要とせずに、簡易な構成で測定部位60と各電極Eとの接触状態を評価することが可能である。
【0039】
第1実施形態では、測定部位60に対する電極部14(各電極E)の接触圧の適否が接触圧指標C[n]に応じて判定され、接触圧が適正であると判定された場合に皮下脂肪厚Lfの測定(S14)が実行される。したがって、電極部14の接触圧の異常(例えば測定部位60に対する過度な押圧)に起因した測定誤差を抑制することが可能である。また、電極部14の接触圧が不適正である場合には利用者に報知されるから、接触圧が適正な状態となるように利用者が電極部14を調整できる(したがって高精度な測定が実現される)という利点もある。
【0040】
ところで、接触圧指標C[n](接触インピーダンスRC1,RC2)は、電極部14の接触圧だけでなく測定部位60の皮膚状態(例えば乾湿状態)にも依存する。したがって、基準値CREFを所定値に固定した構成では、電極部14の接触圧が変化しない(皮下脂肪が変形しない)場合でも、測定部位60の皮膚状態に起因して接触圧指標C[n]と基準値CREFとの間の変動量δC[n]が閾値δTHを上回り、電極部14の接触圧が不適正であると処理S12で判定される可能性がある。他方、第1実施形態では、過去(第1回目)の測定処理で算定された接触圧指標C[n]を基準値CREFとして第2回目以降の測定処理での接触圧の適否を判定するから、基準値CREFを所定値に固定した構成と比較すると、処理S12での判定について測定部位60の皮膚状態の影響が減殺される。したがって、電極部14の接触圧の変化(測定部位60の変形の有無)を高精度に評価できるという利点がある。
【0041】
<B:第2実施形態>
本発明の第2実施形態を以下に説明する。なお、以下に例示する各形態において作用や機能が第1実施形態と同等である要素については、以上の説明で参照した符号を流用して各々の詳細な説明を適宜に省略する。
【0042】
図6は、第2実施形態の制御部22が実行する測定処理のフローチャートである。図6に示すように、第2実施形態の測定処理は、第1実施形態の測定処理(図3)に処理S20〜S23を追加した内容である。
【0043】
第1回目の測定処理にて接触圧指標C[1]を基準値CREFに設定すると(S10)、制御部22は、記憶部24に記憶された変数Mをゼロに初期化する(S20)。変数Mは、測定部位60に対する電極部14の接触圧が適正であるとの判定(S12:YES)が連続した回数を意味する。
【0044】
第2回目以降の各測定処理の処理S12で変動量δC[n]が閾値δTHを下回る(すなわち電極部14の接触圧が適正である)と判定すると、制御部22は、記憶部24に記憶された変数Mに1を加算し(S21)、加算後の変数Mが所定の閾値MTHを下回るか否かを判定する(S22)。処理S22の結果が否定である場合(すなわち、MTH回の測定処理にわたって連続して接触圧が適正であると判定された場合)、制御部22は、第1実施形態と同様に、4電極法(S4〜S6)で測定されたインピーダンスZB[n]に応じた皮下脂肪厚Lfの算定(S14)とその表示(S15)とを実行する。他方、処理S22の結果が肯定である場合(接触圧が適正であると連続して判定された回数Mが未だ閾値MTHに満たない場合)、制御部22は、処理S14および処理S15を実行せずに第n回目の測定処理を終了する。
【0045】
第2回目以降の各測定処理の処理S12で変動量δC[n]が閾値δTHを上回る(すなわち電極部14の接触圧が不適正である)と判定すると、制御部22は、利用者に対するエラー報知(S13)を実行するとともに、記憶部24に記憶された変数Mをゼロに初期化する(S23)。以上の説明から理解されるように、電極部14の接触圧が適正であると連続して判定(S12:YES)される回数Mが閾値MTHに到達するまで(すなわち、電極部14の接触圧が安定するまで)、皮下脂肪厚Lfの算定(S14)および出力(S15)は実行されない。したがって、電極部14の接触圧が安定する以前の段階で皮下脂肪厚Lfの算定を開始する構成と比較して、皮下脂肪厚Lfを高精度に算定できるという利点がある。
【0046】
<C:変形例>
前述の各形態は多様に変形され得る。具体的な変形の態様を以下に例示する。以下の例示から任意に選択された2以上の態様は適宜に併合され得る。
【0047】
(1)変形例1
測定装置100が生成する生体情報は皮下脂肪厚Lfに限定されない。例えば、測定部位60の筋肉厚Lmを生体情報として算定することが可能である。測定部位60の脂肪率Fは、皮下脂肪厚Lfと筋肉厚Lmとの加算値に対する皮下脂肪厚Lfの比(F=Lf/(Lf+Lm)として近似される。したがって、筋肉厚Lmは以下の数式(6)で表現される。
Lm=(Lf/F)−Lf ……(6)
制御部22は、処理S6で算定したインピーダンスZB[n](すなわち測定部位60の生体インピーダンスRB)から脂肪率Fを算定するとともに前述の数式(5)の演算で皮下脂肪厚Lfを算定し、脂肪率Fと皮下脂肪厚Lfとについて数式(6)の演算を実行することで筋肉厚Lmを算定する。
【0048】
(2)変形例2
以上の各形態では、測定部位60に対する電極部14の接触圧の適否の判定に接触圧指標C[n]を適用したが、生体情報の生成に接触圧指標C[n]を直接に適用することも可能である。例えば、測定部位60に対する電極部14の接触圧が大きい(接触圧指標C[n]が小さい)ほど、皮下脂肪が押圧されて皮下脂肪厚Lfが減少するという傾向がある。そこで、電極部14による押圧に起因した皮下脂肪厚Lfの誤差(減少)が補償されるように、接触圧指標C[n]を補正項として皮下脂肪厚Lfの演算式に含めた構成が採用される。具体的には、接触圧指標C[n]が小さい(接触圧が大きく測定部位60の変形が大きい)ほど皮下脂肪厚Lfが増加するように演算式が選定される。以上の例示から理解されるように、接触圧指標C[n]の利用方法は任意であり、第1実施形態や第2実施形態の処理S12のように接触圧指標C[n]に応じて電極部14の接触圧の適否を判定する要素(接触状態判定手段)は省略され得る。
【0049】
(3)変形例3
2電極法によるインピーダンスZA[n]の算定と4電極法によるインピーダンスZB[n]の算定との順番は任意である。また、インピーダンスZA[n]およびインピーダンスZB[n]を算定する具体的な方法は適宜に変更される。例えば、2電極法での測定を所定回にわたって反復した場合の各インピーダンスの代表値(例えば平均値や中央値)をインピーダンスZA[n]として処理S3で確定する構成や、4電極法での測定を所定回にわたって反復した場合の各インピーダンスの代表値(例えば平均値や中央値)をインピーダンスZB[n]として処理S6で確定する構成が採用され得る。
【0050】
(4)変形例4
以上の各形態では、第1回目の測定処理で算定された接触圧指標C[n]を基準値CREFとしたが、基準値CREFの選定の方法は任意である。例えば、事前に選定された所定値を基準値CREFとした構成や、電極部14の接触圧が安定したと判定された以後の測定処理(例えば図6の処理S22の結果が否定となった測定処理)で算定された接触圧指標C[n]を基準値CREFとする構成も採用され得る。
【0051】
(5)変形例5
インピーダンスZA[n]およびインピーダンスZB[n]の相違(接触インピーダンスRCや接触圧)と接触圧指標C[n]との関係(接触圧指標C[n]の算定方法)は適宜に変更される。例えば、前述の各形態では、測定部位60に対する電極部14の接触圧が増加する(接触インピーダンスRCが減少する)ほど接触圧指標C[n]が減少する場合を例示したが、接触圧が増加するほど接触圧指標C[n]が増加するように接触圧指標C[n]を算定する構成(例えばインピーダンスZA[n]とインピーダンスZB[n]との差分の逆数を接触圧指標C[n]として算定する構成)も採用され得る。以上の説明から理解されるように、制御部22が接触圧指標C[n]を算定する処理S8は、測定部位60に対する電極部14の接触圧に応じた接触圧指標C[n]をインピーダンスZA[n]とインピーダンスZB[n]との相違(典型的には差分)に応じて算定する処理として包括される。
【符号の説明】
【0052】
100……測定装置、12……本体部、14……電極部、142……筐体、PA,PB……電極対、E(E1〜E4)……電極、16……ケーブル、22……制御部、24……記憶部、26……操作部、28……表示部、32……電流生成部、34……電圧検出部、36……電極選択部、SW1,SW2……スイッチ、60……測定部位。
【技術分野】
【0001】
本発明は、皮下脂肪厚等の生体情報を計測する技術に関する。
【背景技術】
【0002】
生体インピーダンスを利用して被験者の生体情報を算定する技術が従来から提案されている。例えば特許文献1には、電極部(プローブ)に形成された4個の電極を被験者の身体に接触させて生体インピーダンスを算定し、生体インピーダンスから特定されるレジスタンスRとリアクタンスXとの比(R/X)から被験者の皮下脂肪厚を算定する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−259776号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、電極部から作用する接触圧(押圧力)に応じて皮下脂肪は変形するため、生体インピーダンスに応じて算定される皮下脂肪厚には誤差が発生する可能性がある。電極部の接触圧を検出する圧力センサ等の検出器を利用すれば、電極部から身体に作用する接触圧の適否(例えば皮下脂肪の変形の有無)を検出することも可能であるが、検出器の追加により測定装置の構成が複雑化するという問題がある。なお、以上の説明では皮下脂肪厚の測定を想定したが、電極部の接触圧に依存する他の生体情報(例えば筋肉厚)の測定時にも同様の問題が発生し得る。以上の事情を考慮して、本発明は、電極部から身体に作用する接触圧を簡易な構成で評価することを目的とする。
【課題を解決するための手段】
【0005】
以上の課題を解決するために本発明が採用する手段を説明する。なお、本発明の理解を容易にするために、以下の説明では、本発明の要素と後述の実施形態の要素との対応を括弧書で付記するが、本発明の範囲を実施形態の例示に限定する趣旨ではない。
【0006】
本発明の測定装置は、被験者の身体(例えば測定部位60)に接触する第1電極対(例えば電極対PA)および第2電極対(例えば電極対PB)を含む電極部(例えば電極部14)と、第1電極対を利用した2電極法で第1インピーダンス(例えばインピーダンスZA[n])を算定する第1算定手段(例えば制御部22)と、第1電極対と第2電極対とを利用した4電極法で第2インピーダンス(例えばインピーダンスZB[n])を算定する第2算定手段(例えば制御部22)と、被験者の身体に対する電極部の接触圧に応じた接触圧指標(例えば接触圧指標C[n])を第1インピーダンスと第2インピーダンスとの差分に基づいて算定する指標算定手段(例えば制御部22)とを具備する。以上の構成では、第1電極対を利用した2電極法で測定された第1インピーダンスと第1電極対および第2電極対を利用した4電極法で測定された第2インピーダンスとの差分に応じた接触圧指標C[n]が電極部の接触圧の指標として算定される。したがって、電極部の接触圧の検出に専用される圧力センサ等の検出器を必要とせずに身体に対する電極部の接触圧を評価することが可能である。
【0007】
本発明の好適な態様に係る測定装置は、第1電極対の電極間に被験者の身体を介して電流(例えば測定電流I)を流す電流生成手段(例えば電流生成部32)と、第1電極対および第2電極対の一方を選択する電極選択手段(例えば電極選択部36)と、電極選択手段が選択した電極対の電極間の電圧(例えば測定電圧V)を検出する電圧検出手段(例えば電圧検出部34)とを具備し、第1算定手段は、電極選択手段が第1電極対を選択した状態で電流生成手段が生成する電流と電圧検出手段が検出する電圧とに応じて第1インピーダンスを算定し、第2算定手段は、電極選択手段が第2電極対を選択した状態で電流生成手段が生成する電流と電圧検出手段が検出する電圧とに応じて第2インピーダンスを算定する。以上の態様では、電極選択手段の選択の対象に応じて2電極法と4電極法とを簡便に切替えることが可能である。
【0008】
本発明の好適な態様に係る測定装置は、被験者の身体と電極部との接触状態の適否を接触圧指標に応じて判定する接触状態判定手段(例えば制御部22)と、被験者の身体と電極部との接触状態が適正であると接触状態判定手段が判定した場合に第2インピーダンスに応じた生体情報を算定する情報生成手段(例えば制御部22)とを具備する。以上の態様では、被験者の身体と電極部との接触状態(例えば接触圧)が適正である場合に生体情報が生成されるから、被験者の身体と電極部との接触状態に依存する生体情報(例えば皮下脂肪厚)を高精度に測定できるという利点がある。
【0009】
本発明の好適な態様では、第1算定手段による第1インピーダンスの算定と第2算定手段による第2インピーダンスの算定と指標算定手段による接触圧指標の算定とを含む測定処理が複数回にわたり実行され、接触状態判定手段は、各測定処理にて測定された接触圧指標を基準値(例えば基準値CREF)と比較することで被験者の身体と電極部との接触状態の適否を測定処理毎に判定する。以上の態様では、各測定処理で算定された接触圧指標を基準値と比較することで被験者の身体と電極部との接触状態(接触圧)の変化を検出することが可能である。接触圧指標の基準値は任意であるが、例えば、一の測定処理(例えば第1回目の測定処理)にて測定された接触圧指標を、以後の各測定処理の接触圧指標と比較される基準値とする構成が好適である。
【0010】
本発明の好適な態様において、情報生成手段は、接触状態が適正であるとの判定が所定回(例えば閾値MTH)の測定処理にわたって連続した場合に生体情報を生成する。以上の態様では、接触状態が適正であるとの判断が所定回の測定処理にわたって連続した場合(すなわち接触状態が安定した場合)に生体情報が生成されるから、接触状態が不安定に変化する状態で生体情報を生成する構成と比較して、接触状態に依存する生体情報を高精度に測定できるという利点がある。
【0011】
本発明の好適な態様において、第1電極対は、第1電極(例えば電極E1)と第2電極(例えば電極E2)とで構成され、第2電極対は、第1電極および第2電極の間に配置された第3電極(例えば電極E3)と第4電極(例えば電極E4)とで構成され、第1電極と第2電極と第3電極と第4電極とは、第1方向(例えばX方向)に長尺な形状に形成され、第1方向に直交する第2方向(例えばY方向)に相互に間隔をあけて配列する。以上の態様によれば、各電極を確実に被験者の身体に接触させることが可能である。
【0012】
以上の各態様に係る測定装置は、例えば演算処理装置とプログラム(ソフトウェア)との協働で実現される。本発明のプログラムは、被験者の身体に接触する第1電極対および第2電極対を含む電極部が接続されたコンピュータに、第1電極対を利用した2電極法で第1インピーダンスを算定する第1算定処理(例えば処理S3)と、第1電極対と第2電極対とを利用した4電極法で第2インピーダンスを算定する第2算定処理(例えば処理S6)と、被験者の身体に対する電極部の接触圧に応じた接触圧指標を第1インピーダンスと第2インピーダンスとの差分に基づいて算定する指標算定処理(例えば処理S8)とを実行させる。以上のプログラムによれば、本発明の測定装置と同様の作用および効果が実現される。本発明のプログラムは、コンピュータが読取可能な記録媒体に格納された形態で利用者に提供されてコンピュータにインストールされるほか、通信網を介した配信の形態でサーバ装置から提供されてコンピュータにインストールされる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1実施形態に係る測定装置の外観図である。
【図2】測定装置の電気的な構成のブロック図である。
【図3】測定処理のフローチャートである。
【図4】測定電流の電流経路および測定電圧の検出位置の説明図である。
【図5】接触圧と測定部位のインピーダンスとの関係を示す図表である。
【図6】第2実施形態における測定処理のフローチャートである。
【発明を実施するための形態】
【0014】
<A:第1実施形態>
図1は、第1実施形態に係る測定装置100の構成図である。測定装置100は、被験者の身体に関する生体情報(例えば体組成に関する指標)を測定する生体計測器である。第1実施形態では、被験者の身体のうち測定対象となる任意の部位(以下「測定部位」という)の皮下脂肪厚Lfを生体情報として例示する。図1に示すように、測定装置100は、本体部12と電極部(プローブ)14とを具備する。本体部12と電極部14とはケーブル16を介して電気的に接続される。なお、本体部12と電極部14とを一体に構成することも可能である。
【0015】
電極部14は、利用者(被験者自身や測定者)が把持可能な筐体142と、筐体142の表面144に形成された電極対PAおよび電極対PBとを含んで構成される。電極対PAは電極E1および電極E2の対であり、電極対PBは電極E3および電極E4の対である。4個の電極E1〜E4の各々は、X方向に長尺な形状(略長方形状)に形成され、X方向に直交するY方向に相互に間隔をあけて配列する。図1に示すように、電極E3および電極E4は、電極E1と電極E2との間に位置する。図1では電極E1〜E4を等間隔に配置した場合を例示した。利用者は、被験者の身体の測定部位に4個の電極E1〜E4が接触するように電極部14を移動させることが可能である。
【0016】
図2は、測定装置100の電気的な構成のブロック図である。図2に示すように、本体部12は、制御部22と記憶部24と操作部26と表示部28とを具備する。制御部22(CPU)は、記憶部24に記憶されたプログラムの実行で測定装置100の各要素を制御する。記憶部24は、制御部22が実行するプログラムや制御部22が使用する各種のデータを記憶する記憶回路(例えばROMやRAM)である。
【0017】
操作部26は、利用者からの指示を受付ける入力機器であり、図1に示すように複数の操作子を含んで構成される。例えば皮下脂肪厚Lfの測定開始が操作部26に対する操作で指示される。表示部28(例えば液晶表示装置)は、制御部22による制御のもとで各種の画像を表示する。例えば、表示部28は、測定装置100を利用した測定手順の案内や測定装置100の測定結果(皮下脂肪厚Lf)を表示する。
【0018】
図2に示すように、電極部14は、前述の電極対PAおよび電極対PBのほか、筐体142に収容された電流生成部32と電圧検出部34と電極選択部36とを具備する。なお、電流生成部32と電圧検出部34と電極選択部36とを本体部12に設置することも可能である。
【0019】
図2の電流生成部32は、電極E1と電極E2との間に測定電流Iを供給する。測定電流Iは、被験者の身体を経由して電極E1と電極E2との間を流れる所定の周波数(例えば500kHzまたは6.25kHz)の交流電流である。電圧検出部34は、一対の電極E間の電圧(以下「測定電圧」という)Vを検出する。電圧検出部34が検出した測定電圧Vは、A/D変換器(図示略)にてデジタル信号に変換されたうえで制御部22に供給される。
【0020】
電極選択部36は、電極対PAおよび電極対PBの何れかを電圧検出部34の接続先として選択する。図2に示すように、第1実施形態の電極選択部36は、スイッチSW1とスイッチSW2とを含んで構成される。スイッチSW1は、電圧検出部34の端子TV1を電極E1(接点a)および電極E3(接点b)の一方に接続し、スイッチSW2は、電圧検出部34の端子TV2を電極E2(接点a)および電極E4(接点b)の一方に接続する。
【0021】
図3は、制御部22が実行する測定処理のフローチャートである。電極部14の4個の電極E1〜E4が被験者の測定部位60に接触した状態で測定開始の指示が操作部26に付与されると、例えば割込信号で規定される所定の間隔で図3の測定処理が反復される。変数nは測定処理の回数(nは自然数)を意味する。また、図4は、測定処理の実行中における測定電流Iの電流経路および測定電圧Vの検出位置の模式図である。
【0022】
第n回目の測定処理を開始すると、制御部22は、電圧検出部34の接続先として電極対PAが選択されるように電極選択部36を制御する(S1)。具体的には、制御部22は、スイッチSW1およびスイッチSW2の各々を接点a側に制御することで、図4の部分(A)に示すように、電圧検出部34の端子TV1を電極E1に接続するとともに端子TV2を電極E2に接続する。電極E3および電極E4は電圧検出部34から電気的に絶縁された状態となる。制御部22は、以上の状態で電流生成部32と電圧検出部34とを動作させる(S2)。したがって、電流生成部32が生成した測定電流Iが電極E1から測定部位60を経由して電極E2に流れた状態で、電圧検出部34は電極E1と電極E2との間の測定電圧Vを検出する。
【0023】
制御部22は、処理S2での測定電流Iと測定電圧Vとに応じてインピーダンスZA[n]を算定する(S3)。インピーダンスZA[n]の算定には公知の技術が任意に採用される。以上の説明から理解されるように、制御部22が処理S1から処理S3を実行することで、電極対PAを利用した2電極法(電極対PBは不使用)でインピーダンスZA[n]を算定する手段(第1算定手段)が実現される。
【0024】
図4の部分(A)に示すように、測定電流Iの経路上には、測定部位60(皮下脂肪)の生体インピーダンスRBに加えて、電極E1と測定部位60との間の接触インピーダンスRC1と、電極E2と測定部位60との間の接触インピーダンスRC2とが付随する。したがって、処理S3で算定されるインピーダンスZA[n]は、近似的に以下の数式(1)で表現される。
ZA[n]=RB+RC1+RC2 ……(1)
【0025】
以上の手順でインピーダンスZA[n]を算定すると、制御部22は、電圧検出部34の接続先として電極対PBが選択されるように電極選択部36を制御する(S4)。具体的には、制御部22は、スイッチSW1およびスイッチSW2の各々を接点b側に制御することで、図4の部分(B)に示すように、電圧検出部34の端子TV1を電極E3に接続するとともに端子TV2を電極E4に接続する。制御部22は、以上の状態で電流生成部32と電圧検出部34とを動作させる(S5)。したがって、測定電流Iが電極E1から測定部位60を経由して電極E2に流れた状態で、電圧検出部34は電極E3と電極E4との間の測定電圧Vを検出する。
【0026】
制御部22は、処理S5での測定電流Iと測定電圧Vとに応じてインピーダンスZB[n]を算定する(S6)。インピーダンスZB[n]の算定には公知の技術が任意に採用される。以上の説明から理解されるように、制御部22が処理S4から処理S6を実行することで、電極対PAおよび電極対PBを利用した4電極法でインピーダンスZB[n]を算定する手段(第2算定手段)が実現される。また、制御部22は、測定電流Iと測定電圧Vとの位相差θおよびインピーダンスZB[n]からレジスタンスR(インピーダンスZB[n]の実数部)とリアクタンスX(インピーダンスZB[n]の虚数部)とを算定したうえで両者間の比R/Xを算定する(S7)。
【0027】
処理S5では、電極対PAの内側に位置する電極対PBを利用して測定電圧Vが測定されるから、電極E1の接触インピーダンスRC1や電極E2の接触インピーダンスRC2は測定電圧Vに影響しない。また、電圧検出部34の端子TV1や端子TV2には電流が殆ど流れないから、電極E3の接触インピーダンスRC3や電極E4の接触インピーダンスRC4も測定電圧Vには影響しない。以上のように4電極法では各電極Eの接触インピーダンスRC(RC1〜RC4)を無視できるから、処理S6で算定されるインピーダンスZB[n]は、以下の数式(2)で表現されるように測定部位60の生体インピーダンスRBに略一致する。
ZB[n]=RB ……(2)
【0028】
制御部22は、処理S3で算定したインピーダンスZA[n]と処理S6で算定したインピーダンスZB[n]との相違に応じた接触圧指標C[n]を算定する(S8)。具体的には、制御部22は、以下の数式(3)で示すように、インピーダンスZA[n]とインピーダンスZB[n]との差分を接触圧指標C[n]として算定する。
C[n]=ZA[n]−ZB[n] ……(3)
【0029】
数式(1)および数式(2)を数式(3)に代入すると以下の数式(4)が導出される。
C[n]=RC1+RC2 ……(4)
数式(4)の通り、接触圧指標C[n]は、電極E1の接触インピーダンスRC1と電極E2の接触インピーダンスRC2との加算値に相当する。接触インピーダンスRC(RC1,RC2)は、電極部14から測定部位60に作用する接触圧(押圧力)に応じて変化する。したがって、測定部位60に対する電極部14の接触圧の指標として数式(3)の接触圧指標C[n]を利用することが可能である。
【0030】
図5は、電極部14から測定部位60に作用する接触圧と各インピーダンスとの関係を示す図表である。2電極法で測定されたインピーダンスZA[n]と4電極法で測定されたインピーダンスZB[n]と接触圧指標C[n]との各数値が、接触圧を変化させた複数の場合の各々について図示されている。図5の部分(A)は被験者の腹部を測定部位60とした場合の測定結果であり、図5の部分(B)は被験者の上腕(二の腕)を測定部位60とした場合の測定結果である。
【0031】
図5に示すように、測定部位60に対する電極部14の接触圧が増加するほど2電極法のインピーダンスZA[n]は減少するのに対し、4電極法のインピーダンスZB[n]は殆ど変化しない。したがって、測定部位60に対する接触圧に応じて接触圧指標C[n]は変化する。具体的には、接触圧が増加するほど接触圧指標C[n]が減少するという相関が図5から把握される。以上の傾向を考慮して、第1実施形態では、処理S8で算定される接触圧指標C[n]を測定部位60と電極部14との接触状態(接触圧)の適否の評価に利用する。
【0032】
図3の処理S8で接触圧指標C[n]を算定すると、制御部22は、現段階で実行している測定処理が第1回目(n=1)であるか否かを判定する(S9)。処理S9の結果が肯定である場合、制御部22は、今回の測定処理の処理S8で算定した接触圧指標C[n](C[1])を基準値CREFとして記憶部24に格納したうえで第1回目の測定処理を終了する(S10)。基準値CREFは、第2回目以降の各測定処理で算定される接触圧指標C[n]の基準となる数値である。
【0033】
処理S9の結果が否定である場合(すなわち、第2回目以降の測定処理の実行中である場合)、制御部22は、現段階(第n回目)の測定処理内の処理S8で算定した接触圧指標C[n]を記憶部24内の基準値CREFと比較したときの変動量δC[n]を算定する(S11)。具体的には、変動量δC[n]は、接触圧指標C[n]と基準値CREFとの差分の絶対値(δC[n]=|C[n]−CREF|)である。そして、制御部22は、変動量δC[n]が所定の閾値δTHを下回るか否かを判定する(S12)。閾値δTHは、例えば50Ω程度の数値に設定される。
【0034】
測定部位60に対する接触圧が測定開始の直後(第1回目の測定処理)から大幅に増加した場合、測定部位60の皮下脂肪が電極部14による押圧で大きく変形している可能性が高い。以上のように測定部位60が変形した状態では皮下脂肪厚Lfを正確に推定できない。そこで、変動量δC[n]が閾値δTHを上回ると処理S12で判定した場合(すなわち、第1回目の測定処理の実行時と比較して接触圧が大幅に変化した場合)、制御部22は、測定部位60に対する接触圧が不適正である旨の警告(測定エラー)を利用者に報知したうえで第n回目の測定処理を終了する(S13)。利用者に対する警告の方法は任意であるが、例えば表示部28に対する画像の表示や音声での出力が好適である。以上の説明から理解されるように、制御部22が処理S12を実行することで、測定部位60と電極部14(各電極E)との接続状態の適否を接触圧指標C[n]に応じて判定する手段(接触状態判定手段)が実現される。
【0035】
他方、測定部位60に対する接触圧が適正な範囲内に維持されている場合(すなわち第1回目の測定処理の実行時から測定部位60が過度に変形していない場合)、接触圧指標C[n]は基準値CREFを含む所定の範囲(例えば(CREF±δTH)の範囲)内の数値となる。そこで、変動量δC[n]が閾値δTHを下回ると処理S12で判定した場合、制御部22は、今回(第n回目)の測定処理の処理S6で算定したインピーダンスZB[n](生体インピーダンスRB)に応じた皮下脂肪厚Lfを算定する(S14)。すなわち、制御部22が処理S14を実行することで、測定部位60と電極部14との接触状態が適正であると判定された場合(S12:YES)に生体情報を算定する要素(情報生成手段)が実現される。
【0036】
皮下脂肪は筋肉と比較して測定電流Iと測定電圧Vとの位相差θを発生させ難いから、測定部位60の皮下脂肪厚Lfが大きいほど位相差θは小さくなる。したがって、皮下脂肪厚Lfが大きいほど、処理S7で算定される比R/Xが大きくなるという傾向がある。以上の傾向を考慮すると、皮下脂肪厚Lf(測定部位60の表面を基準(ゼロ)とした皮下脂肪の深さ)は、定数aおよび定数bを含む以下の数式(5)で表現される。定数aおよび定数bは、比R/Xと皮下脂肪厚Lfの実測値との相関に応じて統計的に選定される。なお、皮下脂肪厚Lfと比R/Xとの関係については特許文献1にも詳述されている。
Lf=−a−b×(R/X) ……(5)
【0037】
図3の処理S14において、制御部22は、4電極法のインピーダンスZB[n](測定部位60の生体インピーダンスRB)に応じて処理S7で算定した比R/Xについて数式(5)の演算を実行することで皮下脂肪厚Lfを生体情報として算定する。そして、制御部22は、処理S14で算定した皮下脂肪厚Lfを測定結果として表示部28に表示させる(S15)。以上の説明から理解されるように、表示部28に表示される皮下脂肪厚Lfの数値が測定処理毎に刻々と変化し、測定部位60に対する電極部14の接触圧が測定開始時と比較して大幅に変化した場合(すなわち、第1回目の測定処理の実行時と比較して測定部位60が大きく変形した場合)には利用者に警告が報知される。
【0038】
以上に例示した第1実施形態では、電極対PAを利用した2電極法で測定されたインピーダンスZA[n]と電極対PAおよび電極対PBを利用した4電極法で測定されたインピーダンスZB[n]との相違に応じた接触圧指標C[n]が、測定部位60に対する電極部14の接触圧の指標として算定される。すなわち、皮下脂肪厚Lfの測定に使用される各電極Eが接触圧指標C[n]の算定に流用される。したがって、電極部14の接触圧の検出に専用される圧力センサ等の検出器を必要とせずに、簡易な構成で測定部位60と各電極Eとの接触状態を評価することが可能である。
【0039】
第1実施形態では、測定部位60に対する電極部14(各電極E)の接触圧の適否が接触圧指標C[n]に応じて判定され、接触圧が適正であると判定された場合に皮下脂肪厚Lfの測定(S14)が実行される。したがって、電極部14の接触圧の異常(例えば測定部位60に対する過度な押圧)に起因した測定誤差を抑制することが可能である。また、電極部14の接触圧が不適正である場合には利用者に報知されるから、接触圧が適正な状態となるように利用者が電極部14を調整できる(したがって高精度な測定が実現される)という利点もある。
【0040】
ところで、接触圧指標C[n](接触インピーダンスRC1,RC2)は、電極部14の接触圧だけでなく測定部位60の皮膚状態(例えば乾湿状態)にも依存する。したがって、基準値CREFを所定値に固定した構成では、電極部14の接触圧が変化しない(皮下脂肪が変形しない)場合でも、測定部位60の皮膚状態に起因して接触圧指標C[n]と基準値CREFとの間の変動量δC[n]が閾値δTHを上回り、電極部14の接触圧が不適正であると処理S12で判定される可能性がある。他方、第1実施形態では、過去(第1回目)の測定処理で算定された接触圧指標C[n]を基準値CREFとして第2回目以降の測定処理での接触圧の適否を判定するから、基準値CREFを所定値に固定した構成と比較すると、処理S12での判定について測定部位60の皮膚状態の影響が減殺される。したがって、電極部14の接触圧の変化(測定部位60の変形の有無)を高精度に評価できるという利点がある。
【0041】
<B:第2実施形態>
本発明の第2実施形態を以下に説明する。なお、以下に例示する各形態において作用や機能が第1実施形態と同等である要素については、以上の説明で参照した符号を流用して各々の詳細な説明を適宜に省略する。
【0042】
図6は、第2実施形態の制御部22が実行する測定処理のフローチャートである。図6に示すように、第2実施形態の測定処理は、第1実施形態の測定処理(図3)に処理S20〜S23を追加した内容である。
【0043】
第1回目の測定処理にて接触圧指標C[1]を基準値CREFに設定すると(S10)、制御部22は、記憶部24に記憶された変数Mをゼロに初期化する(S20)。変数Mは、測定部位60に対する電極部14の接触圧が適正であるとの判定(S12:YES)が連続した回数を意味する。
【0044】
第2回目以降の各測定処理の処理S12で変動量δC[n]が閾値δTHを下回る(すなわち電極部14の接触圧が適正である)と判定すると、制御部22は、記憶部24に記憶された変数Mに1を加算し(S21)、加算後の変数Mが所定の閾値MTHを下回るか否かを判定する(S22)。処理S22の結果が否定である場合(すなわち、MTH回の測定処理にわたって連続して接触圧が適正であると判定された場合)、制御部22は、第1実施形態と同様に、4電極法(S4〜S6)で測定されたインピーダンスZB[n]に応じた皮下脂肪厚Lfの算定(S14)とその表示(S15)とを実行する。他方、処理S22の結果が肯定である場合(接触圧が適正であると連続して判定された回数Mが未だ閾値MTHに満たない場合)、制御部22は、処理S14および処理S15を実行せずに第n回目の測定処理を終了する。
【0045】
第2回目以降の各測定処理の処理S12で変動量δC[n]が閾値δTHを上回る(すなわち電極部14の接触圧が不適正である)と判定すると、制御部22は、利用者に対するエラー報知(S13)を実行するとともに、記憶部24に記憶された変数Mをゼロに初期化する(S23)。以上の説明から理解されるように、電極部14の接触圧が適正であると連続して判定(S12:YES)される回数Mが閾値MTHに到達するまで(すなわち、電極部14の接触圧が安定するまで)、皮下脂肪厚Lfの算定(S14)および出力(S15)は実行されない。したがって、電極部14の接触圧が安定する以前の段階で皮下脂肪厚Lfの算定を開始する構成と比較して、皮下脂肪厚Lfを高精度に算定できるという利点がある。
【0046】
<C:変形例>
前述の各形態は多様に変形され得る。具体的な変形の態様を以下に例示する。以下の例示から任意に選択された2以上の態様は適宜に併合され得る。
【0047】
(1)変形例1
測定装置100が生成する生体情報は皮下脂肪厚Lfに限定されない。例えば、測定部位60の筋肉厚Lmを生体情報として算定することが可能である。測定部位60の脂肪率Fは、皮下脂肪厚Lfと筋肉厚Lmとの加算値に対する皮下脂肪厚Lfの比(F=Lf/(Lf+Lm)として近似される。したがって、筋肉厚Lmは以下の数式(6)で表現される。
Lm=(Lf/F)−Lf ……(6)
制御部22は、処理S6で算定したインピーダンスZB[n](すなわち測定部位60の生体インピーダンスRB)から脂肪率Fを算定するとともに前述の数式(5)の演算で皮下脂肪厚Lfを算定し、脂肪率Fと皮下脂肪厚Lfとについて数式(6)の演算を実行することで筋肉厚Lmを算定する。
【0048】
(2)変形例2
以上の各形態では、測定部位60に対する電極部14の接触圧の適否の判定に接触圧指標C[n]を適用したが、生体情報の生成に接触圧指標C[n]を直接に適用することも可能である。例えば、測定部位60に対する電極部14の接触圧が大きい(接触圧指標C[n]が小さい)ほど、皮下脂肪が押圧されて皮下脂肪厚Lfが減少するという傾向がある。そこで、電極部14による押圧に起因した皮下脂肪厚Lfの誤差(減少)が補償されるように、接触圧指標C[n]を補正項として皮下脂肪厚Lfの演算式に含めた構成が採用される。具体的には、接触圧指標C[n]が小さい(接触圧が大きく測定部位60の変形が大きい)ほど皮下脂肪厚Lfが増加するように演算式が選定される。以上の例示から理解されるように、接触圧指標C[n]の利用方法は任意であり、第1実施形態や第2実施形態の処理S12のように接触圧指標C[n]に応じて電極部14の接触圧の適否を判定する要素(接触状態判定手段)は省略され得る。
【0049】
(3)変形例3
2電極法によるインピーダンスZA[n]の算定と4電極法によるインピーダンスZB[n]の算定との順番は任意である。また、インピーダンスZA[n]およびインピーダンスZB[n]を算定する具体的な方法は適宜に変更される。例えば、2電極法での測定を所定回にわたって反復した場合の各インピーダンスの代表値(例えば平均値や中央値)をインピーダンスZA[n]として処理S3で確定する構成や、4電極法での測定を所定回にわたって反復した場合の各インピーダンスの代表値(例えば平均値や中央値)をインピーダンスZB[n]として処理S6で確定する構成が採用され得る。
【0050】
(4)変形例4
以上の各形態では、第1回目の測定処理で算定された接触圧指標C[n]を基準値CREFとしたが、基準値CREFの選定の方法は任意である。例えば、事前に選定された所定値を基準値CREFとした構成や、電極部14の接触圧が安定したと判定された以後の測定処理(例えば図6の処理S22の結果が否定となった測定処理)で算定された接触圧指標C[n]を基準値CREFとする構成も採用され得る。
【0051】
(5)変形例5
インピーダンスZA[n]およびインピーダンスZB[n]の相違(接触インピーダンスRCや接触圧)と接触圧指標C[n]との関係(接触圧指標C[n]の算定方法)は適宜に変更される。例えば、前述の各形態では、測定部位60に対する電極部14の接触圧が増加する(接触インピーダンスRCが減少する)ほど接触圧指標C[n]が減少する場合を例示したが、接触圧が増加するほど接触圧指標C[n]が増加するように接触圧指標C[n]を算定する構成(例えばインピーダンスZA[n]とインピーダンスZB[n]との差分の逆数を接触圧指標C[n]として算定する構成)も採用され得る。以上の説明から理解されるように、制御部22が接触圧指標C[n]を算定する処理S8は、測定部位60に対する電極部14の接触圧に応じた接触圧指標C[n]をインピーダンスZA[n]とインピーダンスZB[n]との相違(典型的には差分)に応じて算定する処理として包括される。
【符号の説明】
【0052】
100……測定装置、12……本体部、14……電極部、142……筐体、PA,PB……電極対、E(E1〜E4)……電極、16……ケーブル、22……制御部、24……記憶部、26……操作部、28……表示部、32……電流生成部、34……電圧検出部、36……電極選択部、SW1,SW2……スイッチ、60……測定部位。
【特許請求の範囲】
【請求項1】
被験者の身体に接触する第1電極対および第2電極対を含む電極部と、
前記第1電極対を利用した2電極法で第1インピーダンスを算定する第1算定手段と、
前記第1電極対と前記第2電極対とを利用した4電極法で第2インピーダンスを算定する第2算定手段と、
前記被験者の身体に対する前記電極部の接触圧に応じた接触圧指標を前記第1インピーダンスと前記第2インピーダンスとの差分に基づいて算定する指標算定手段と
を具備する測定装置。
【請求項2】
前記第1電極対の電極間に被験者の身体を介して電流を流す電流生成手段と、
前記第1電極対および前記第2電極対の一方を選択する電極選択手段と、
前記電極選択手段が選択した電極対の電極間の電圧を検出する電圧検出手段とを具備し、
前記第1算定手段は、前記電極選択手段が前記第1電極対を選択した状態で前記電流生成手段が生成する電流と前記電圧検出手段が検出する電圧とに応じて前記第1インピーダンスを算定し、
前記第2算定手段は、前記電極選択手段が前記第2電極対を選択した状態で前記電流生成手段が生成する電流と前記電圧検出手段が検出する電圧とに応じて前記第2インピーダンスを算定する
請求項1の測定装置。
【請求項3】
被験者の身体と前記電極部との接触状態の適否を前記接触圧指標に応じて判定する接触状態判定手段と、
被験者の身体と前記電極部との接触状態が適正であると前記接触状態判定手段が判定した場合に前記第2インピーダンスに応じた生体情報を生成する情報生成手段と
を具備する請求項1または請求項2の測定装置。
【請求項4】
前記情報生成手段は、皮下脂肪厚を前記生体情報として算定する
請求項3の測定装置。
【請求項5】
前記第1算定手段による前記第1インピーダンスの算定と前記第2算定手段による前記第2インピーダンスの算定と前記指標算定手段による接触圧指標の算定とを含む測定処理が複数回にわたり実行され、
前記接触状態判定手段は、一の測定処理にて測定された接触圧指標を基準値とし、以降の各測定処理にて測定された接触圧指標を前記基準値と比較することで被験者の身体と前記電極部との接触状態の適否を測定処理毎に判定する
請求項3または請求項4の測定装置。
【請求項6】
前記情報生成手段は、前記接触状態が適正であるとの判定が所定回の測定処理にわたって連続した場合に前記生体情報を生成する
請求項5の測定装置。
【請求項1】
被験者の身体に接触する第1電極対および第2電極対を含む電極部と、
前記第1電極対を利用した2電極法で第1インピーダンスを算定する第1算定手段と、
前記第1電極対と前記第2電極対とを利用した4電極法で第2インピーダンスを算定する第2算定手段と、
前記被験者の身体に対する前記電極部の接触圧に応じた接触圧指標を前記第1インピーダンスと前記第2インピーダンスとの差分に基づいて算定する指標算定手段と
を具備する測定装置。
【請求項2】
前記第1電極対の電極間に被験者の身体を介して電流を流す電流生成手段と、
前記第1電極対および前記第2電極対の一方を選択する電極選択手段と、
前記電極選択手段が選択した電極対の電極間の電圧を検出する電圧検出手段とを具備し、
前記第1算定手段は、前記電極選択手段が前記第1電極対を選択した状態で前記電流生成手段が生成する電流と前記電圧検出手段が検出する電圧とに応じて前記第1インピーダンスを算定し、
前記第2算定手段は、前記電極選択手段が前記第2電極対を選択した状態で前記電流生成手段が生成する電流と前記電圧検出手段が検出する電圧とに応じて前記第2インピーダンスを算定する
請求項1の測定装置。
【請求項3】
被験者の身体と前記電極部との接触状態の適否を前記接触圧指標に応じて判定する接触状態判定手段と、
被験者の身体と前記電極部との接触状態が適正であると前記接触状態判定手段が判定した場合に前記第2インピーダンスに応じた生体情報を生成する情報生成手段と
を具備する請求項1または請求項2の測定装置。
【請求項4】
前記情報生成手段は、皮下脂肪厚を前記生体情報として算定する
請求項3の測定装置。
【請求項5】
前記第1算定手段による前記第1インピーダンスの算定と前記第2算定手段による前記第2インピーダンスの算定と前記指標算定手段による接触圧指標の算定とを含む測定処理が複数回にわたり実行され、
前記接触状態判定手段は、一の測定処理にて測定された接触圧指標を基準値とし、以降の各測定処理にて測定された接触圧指標を前記基準値と比較することで被験者の身体と前記電極部との接触状態の適否を測定処理毎に判定する
請求項3または請求項4の測定装置。
【請求項6】
前記情報生成手段は、前記接触状態が適正であるとの判定が所定回の測定処理にわたって連続した場合に前記生体情報を生成する
請求項5の測定装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−176063(P2012−176063A)
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願番号】特願2011−39902(P2011−39902)
【出願日】平成23年2月25日(2011.2.25)
【出願人】(000133179)株式会社タニタ (303)
【Fターム(参考)】
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願日】平成23年2月25日(2011.2.25)
【出願人】(000133179)株式会社タニタ (303)
【Fターム(参考)】
[ Back to top ]